2008/12/30
★ 17:44
最近買った本(「赤毛のアン」に学ぶ幸福に…、図書室の海、鋼殻のレギオス11、ロボマガ61、マリみて)
今月分書いてませんでした。
購入順(リンク先はアマゾン not アフィリエイト)
「マリみて」と図書館の海」は帰省中に読むつもり。
[
☆コメント ]
[
△先頭へ ]
2008/12/29
self.age++
self.chronicle.addNewPage
みならいを卒業して age++ が呼ばれなくなる日はいつ。
(卒業以外にも ++ が呼ばれなくなるシチュエーションがあるけどそれはちょっと…)
なお、ageオブジェクトの公開メソッドには「現在値取得」がありません。
任意の数値、日時との比較結果を取得する公開メソッドがあるようですが、戻り値がランダムに変化していることが確認されています。
witchクラスを動的継承した際に ageオブジェクトの書き換えが行われたようです。
---
何も誕生日の前日に怪我しなくてもいいでしょうに…
しっぺ返しが来るような魔法つかってませんよ?
自分へのプレゼントで色々買うつもりだったけど全部とりやめ。
大掃除&場所確保ができないからお迎えできないし…
---
ひとつ前
[
☆コメント ]
[
△先頭へ ]
2008/12/28
★ 18:31
練習会不参加、忘年会&徹カラ、そしてその後…
昨日は川崎産業振興会館へ寄ったあと
練習会 へ行くつもりだったのだけど…
仕事納めで気が緩んで朝4時までラノベ読んでて、起きたら昼(汗
研修室の下見は枠が詰まっていて却下となり、ライブ中継ソフトのあれこれを家で試していたら5時過ぎちゃって、今年最後の練習会は参加できず。今年は練習会に全然参加できなかったな…。
忘年会には20分くらい遅刻。
お酒を呑みつつ、草加ロボットプロレスのビデオと熱中夜話の録画をでっかい画面で観賞。企画人・参加者の解説とツッコミが飛び交いめちゃめちゃ楽しかったです。
ビデオ観賞の後は、久しぶりの居酒屋バトル。
GP組や本選参加組の高機動型ロボが1/4リング(オクタゴン)上で技を掛け合うのをかぶりつきで観賞しながらの呑み。
こんな狭いリングで普通に戦える操縦技術にちょっと驚いたり。(まぁ、「神の手」は何度もでてきましたけど)
そして忘年会の後はいつもの如く徹カラで朝まで騒いで、今年のロボ納め(?)終了。
はーい、みんなお疲れ様でしたー。良いお年を…
…で済むはずでしたが…
3階から降りるのにエレベータが混んでたので非常階段で降り始めたら…踊り場付近で足を踏み外して3段くらい落下。
なんとか手すりに手がかかって転ばずに済んだのですが…
右手小指をどこかにぶつけたようで指先が変。
こ、この感じは…「
一昨年の薬指指先骨折 」と同じ…ような…
コンビニで湿布を買って冷やしながら帰宅して、年末休日診療やっている整形外科へ
やっぱり折れてました。ポッキリ。
さらに、指の長軸方向に圧力がかかったらしく、小指の骨全体にピキピキとヒビが…
先生からは「ちょっとぶつけただけでこんなになるかなぁ…骨粗鬆症かも…」と言われてレントゲン撮影追加。
「
今年は少しはいい年だったかなー 」って書いたのに年末ぎりぎりになってこれかよ…
orz ---
カラオケでは呑んでいないので酔ってはいなかったと思うんだけどなぁ…
踊り場部分が三角形の階段になってて、内回りすると落ちることを忘れてぼーっと降りてたんでしょうね。
カラオケ始めたばかりの酔いが残ってる時間に非常階段使って階下のトイレに行けていたんだし。
そういえば、去年の忘年会徹カラの帰りにも、同じところで転んだ気がします。そのときは両手をついて擦り傷作っただけで済んでたような。(車で行ってたから身軽だったのかも)
なんか、どんどん運動神経が鈍くなってる感じ。
[
☆コメント ]
[
△先頭へ ]
2008/12/27
★ 0:21
(URLメモ) Linuxのシリアルドライバの構造
同じく「
Armadilloメーリングリストアーカイブ 」の
[Armadillo:03631] Re: Armadillo-300のシリアルコンソールの処理概要について 経由
Serial Drivers
This article is meant to show the internal structure of device drivers for serial ports, and how they can be perform a variety of services including ppp and slip. The discussion is based on 2.4 source code, but most of the material applies equally well to 2.2 and 2.0.
ふむふむ、シリアルドライバの上に他のドライバを重ねるのはこういう仕組みなのね。
これを真似してPICとの通信をフレーム単位に処理するドライバを作れるといいんだけど…
2.6も同じ構造なのかな…
最近、メモばっかりで何も作業できていないのが悔しい。
[
☆コメント ]
[
△先頭へ ]
★ 0:10
(URLメモ) Armadillo-220でUSBオーディオ
ひさしぶりに
Armadilloメーリングリストのアーカイブ を覗いたら、
USBオーディオ な話題が。
ふむふむ…
カーネル作り直しでOKなのね。
…って、うちにあるのは210だからダメじゃん。
220がもう少しコンパクトだったらなぁ…
[
☆コメント ]
[
△先頭へ ]
2008/12/23
朝、ちょっと寒気がして変だったので風邪薬を飲んだ。
…ら、眠くなってまたベッドの中へ。
起きたらもう4時だった…
orz サボりすぎて溜めてしまった仕事を片付けにいくつもりだったのに…
「家からリモートで作業するしかないか」と思ってAthlon X2を載せてるサブマシン(録画PC兼用)を起動したら、ついついデスクトップにあった「電脳コイルの最終回」を見てしまい、さらに30分ロスト。
(ま、まあ、落ちてた心が少し上昇したからいいか…)
ここで土曜日に買ってきたラノベその他を読み出したりしたら、深夜になってしまうだろうな…と思いつつ、きっと読みはじめてしまうに違いない。
この部屋、トラップが多すぎ。
---
半年間ずるずると期限を延ばしていた仕事が真の〆切を割りそうなのと、諸般の事情で「わんだほー」には参戦しなくなったことで、ロボ開発は完全に停滞中です。(あ、会場には行きますよ)
[
☆コメント ]
[
△先頭へ ]
2008/12/01
★ 22:15
(録画メモ) 12/1 22:25- NHK教育 知るを楽しむ この人この世界 浅田稔 ロボット未来世紀
#タイトル長すぎ…
IRC経由
浅田稔 ロボット未来世紀 第1回 ロボットは人間の鏡
12月1日(月) NHK教育 22:25〜22:50
▽ロボ世紀研究最前線
出演 浅田稔
放送は12月〜1月の毎月曜日 22:25〜22:50 (全7回予定)
番組公式ページ から
月曜日:12月〜1月 ロボット未来世紀 浅田稔 (全7回)
放送スケジュール・詳細
[
☆コメント ]
[
△先頭へ ]
★ 22:12
「師走」 今年は少しはいい年だったかや?
仕事も収入も相変わらずだけど、趣味のロボット関連では色々と進捗があっていい年だったかな…
その分、あまりドライブとか行かなくてひきこもり気味だったけど。
--- 今年のロボ関連 ---
春のROBO-ONE13thは資格審査を受けられずいつもと同じ…
春のRoboFight7で、ようやくリング上で動くところを披露
(相手の鈍器の一撃で終わったけど…)
秋のROBO-ONE14thでは資格審査の坂道に10回ちかく挑戦できて
(結局、登り坂すら攻略できなかったけど…)
秋のRoboFight8では、リングの端から端まで移動した上に一勝することができました。
(有線操作な上にパンチのひとつも出せなかったけど…)
今年中には無線通信+ジョイパッド操作まで完成させて、来年は「リアルタイム計算歩行の実験」と「人型ノートパソコンの開発」に進みたいところ。
---
そいえば「体調くずして何日も伏せる」ような状態にはならなかった…気がします。
[
☆コメント ]
[
△先頭へ ]
2008/11/30
★ 23:59
今日のドライブ (伊豆長岡かつらぎ山パノラマパーク)
先週たどり着けなかった のでリベンジしてきました。
しかし…朝、起きたら8時…
orz
富士山ライブカメラ(
忍野 、
三ッ峠 )を確認したら快晴だったので下見だけでもするつもりで9時に出発。
途中、事故渋滞で20分ほど時間を浪費したけど、12時ちょっと前に「
かつらぎ山パノラマパーク 」のロープウェイ乗り場に到着。(途中休憩15分)
山頂は寒いかな…と思ってジャンバーを持っていったけど、天気がよくて風もなくてポカポカしてていい感じでした。
写真は→
こちら (とりあえず繋いだだけなので、あとで継目は修正するつもり)
山頂周辺はちょうど紅葉していて、尾根づたいに作られたボードウォークは紅や黄色に包まれていて綺麗でした。
日が暮れるまでずーーーっと景色を眺めていたかったけど、帰りが渋滞しそうなので14:30には撤収。
結局、帰りも事故渋滞に巻き込まれて、大井松田で下道(246)に出てさらに遅くなったという…(秦野→鶴巻→寒川と抜けて中原街道、第三京浜で帰宅)
海沿いの道で海鮮料理の店を発見して遅いお昼ごはんを食べてたのが敗因…かなぁ…
(「渋滞25km、100分」って表示だったんだから素直にそのまま走ったほうが早かった)
---
現地に着くまでは「夕方には秋葉へ行って練習会に顔を出そうかなー」と思っていたんですけどね。
[
☆コメント ]
[
△先頭へ ]
★ 0:16
Bluetoothがつながらない@Windows Vista
Linuxだと繋がるのに…
この分だと明日の練習会も有線操作。
…と言いつつ、天気が良かったら朝から撮影ドライブに行くので、練習会には出られないかも。
[
☆コメント ]
[
△先頭へ ]
2008/11/29
★ 17:59
昨日のお買物 (「駆け出し魔法使い…」、「彩雲国物語」、「グランドマスター!」)
12月の新刊、もう出ているかも…と思って本屋へ寄り道。
…と、「駆け出し魔法使いとはじまりの本」(原題: So you want to be a wizard)を見付けたので一緒に購入。
先月に見かけたとき買わないままで、誰かの日記で原題付きで紹介されていて気になったときには書店で見付けられなくなっていました。
リンク先はアマゾン(not アフィリエイト)
コバルト文庫の新刊表紙画像がアマゾンに載らないのって何か理由があるんだろうか…
そういえば、夏以降に買った本を日記にメモしていない気がします。
[
☆コメント ]
[
△先頭へ ]
2008/11/25
一段目以外全部欠けてるのって初めて見たかも(Futaba S3003)
眠いので今日の作業はこれだけ。
連休中は…
・土曜:仕事疲れで一日ベッドと仲良し
・日曜:
富士山を眺めながら渋滞ドライブ ・月曜:疲れて一日ベッドと仲良し
でした。
[
☆コメント ]
[
△先頭へ ]
2008/11/19
★ 22:37
Bluetooth経由でのコマンド送信成功
11/7の日記 には「LF(0x10)の落とし忘れ」が原因と書いたけど、よく調べたら混ざっていたのはCR(0x13)で、ターミナルの設定が「LF を CRLF に変換」になっていたから。
さらにダブルバッファの処理にバグ(コマンド終端のLFチェックミス)があって、コマンドを終端まで受け取っていないのにパーサに送って文法エラーになっていたり…
とりあえず、LinuxにUSB BTモジュールを付けて、Bluetooth経由でコマンドを送って操作できるところまで完了。
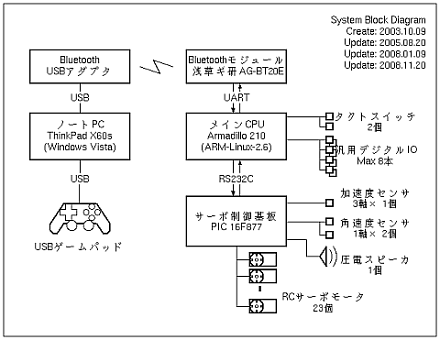
あとは、ノートPC(Windows)で操作できるようにして、USBジョイパッドからも操作できるようにすれば、
5年前(!)に描いたブロック図 の要素がようやく揃います。
個々の要素の製品はほとんど入れ替わってしまったけどね。
--- 2008/11/20 01:30 追記
ブロック図を最新状態に修正してみました
[
☆コメント ]
[
△先頭へ ]
2008/11/18
★ 20:25
(URLメモ) on PC/Sat.3rd に関係しそうなもの色々&計算やり直し
168.6m/sec って 607.0km/h ですね…。
こんな速度でぶつけたらロボもデブリもバラバラになってデブリが増えて…
orz 168.6m/secくらいなら、
「はやぶさ」のイオンエンジン [JAXA] があればー
と思ったら、乾燥重量36kgでした…
参考:
小惑星探査衛星はやぶさとイオンエンジンの能力 Google検索: イオンエンジン 超小型 で探してみると、CubeSat(10^3cmの人工衛星)用にマイクロ波エンジンを研究している方がおられる模様。
超小型マイクロ波エンジンのシステム設計 実験結果では
マイクロ波電力2W、推進剤流量 0.2cc/min で 推力20μN とのこと。
スラスタ形状φ15×9×高さ
本体重量とか推進剤の種類とか判らないけどまあこのあたりで。
あー、でも電力系統がどうなってるのか理解できない…。まあいいや。
20*10^-6Nで1.5kgのロボを加速するから…
4000秒連続稼働で 160m/s の速度かな。
で、軌道の接線方向に連続で吹かすのはむずかしいからー
遠地点と近地点で1秒ずつ吹かすとすると…
って、軌道周期95秒っておかしくない???
…
…
…
orz
ホーマン遷移の計算ページ で、軌道半径のとこに軌道高度入れてました…
やりなおしです。
正しくは、
現在軌道半径: 6828km、周回速度: 7640m/sec、周期:93.59min
目標軌道半径: 6818km、周回速度: 7645m/sec、周期:93.38min
ΔV1: -2.8m/sec、ΔV2: -2.801m/sec
でした。
これくらいならエンジン積まなくてもサーボだけでいける…のかも。
--- 2008/11/18 20:43 追記
また間違ってる…
20*10^-6Nで1.5kg のロボを加速するんだから、4000秒じゃなくて5000秒で167m/sec
エンジン積まずにサーボだけにしたら、スタート時に衛星蹴らなきゃいけなくない??デブリに追いついたときのブレーキの問題もあるし… [
☆コメント ]
[
△先頭へ ]
★ 15:10
第3回 ROBO-ONE on PC/Satの課題が面白そう
ROBO-ONEonPC/Sat. 3rd ROBO-ONE衛星搭載ロボットの設計、シミュレーション、制御
ROBO-ONE on PC/Sat, 3rd(オン・ピーシー・サテライト・サード)は、デブリ(宇宙ゴミ)掃除ロボットシュミレーションを実施します。
450kmの極軌道から440kmの極軌道に遷移して、デブリを回収(衛星に戻る)or大気圏に落とすのがミッション。
自重1.5kg、推進剤はロボ側搭載で、重さ3kgのデブリの軌道をそんなに変えられるのかなぁ…
こういう話はやはり
野田指令のマツドサイエンティスト研究所 かな…
と思ったけど、試しに軌道遷移で検索したら
「ホーマン遷移」の計算ができるページ を見つけました。
(「ホーマン遷移」は
人工衛星の軌道設計 で解説されています)
で、軌道遷移するには、167.6m/sec の減速と168.6m/secの再減速が必要らしい。
--- 2008/11/18 20:26 注釈
この値は、軌道高度と軌道半径を取り違えて計算したので間違っています。
正しい値は、
次の日記 参照
一度にこの減速は難しいだろうから徐々に降りていくことになるのかな…
Mission1の「スラスターの設計」に「他の軌道上に存在するデブリに1年以内に移動できること」と書かれているからそうなんでしょうね。
さらに、ミッション開始時点でロボ(ROBO-ONE衛星)とデブリが北極点上空を通過するのだから、軌道遷移するたびに緯度がずれるからそっちも考慮しなきゃいけない。
デブリにロボをぶつけるつもりなら再減速はしなくてもいいのかなぁ…って、それじゃデブリの速度が上がって高度が上がっちゃうね。
それとも、ロボをもっと細長い楕円軌道に入れてデブリの前からぶつけてデブリと速度交換する?
どんな風に解けばいいのか判らないけど、なんか面白そう。
週末にもうちょっと考えてみよっと。
「大気圏に落とす」の成立条件は「言ったもの勝ち」だよね…たぶん。
[
☆コメント ]
[
△先頭へ ]
2008/11/16
Bluetooth経由の通信が片方向しか動かない…
PCからの送信がNGなので実験続行不可能。
多分、Armadilloから引っ張りだしている線の接触不良だろうな…
ロボファイトの前にも起きてたし。 またバラしてシリアル直結でのテストからやりなおし (泣
--- 2008/11/16 23:50 追記
Armadilloとセンサー基板のコネクタ、BTモジュールへのケーブル両端のコネクタをつついたら直りました。
順番にやらなかったので結局どこが原因なのか判らないまま…
[
☆コメント ]
[
△先頭へ ]
2008/11/12
★ 23:41
むー。今週は全然作業できそうにない…
平日は表の仕事で忙しくて作業する時間がないです。
週末はベッドと仲良しな予感。
夜に「
ONOの電脳壁新聞 」を読んで日記を書く余裕があるだけでもまだましかな。
(アンテナは朝と寝る前に一度見るくらい)
[
☆コメント ]
[
△先頭へ ]
2008/11/09
お昼前に起きたのに寒くて二度寝してこんな時間。
今日は美容院いくだけで終わりかな。
ろぼとまで歩幅広げの練習するのは来週に先送り。
[
☆コメント ]
[
△先頭へ ]
2008/11/07
★ 21:12
無線で動かなかった原因&パンチが出なかった原因
Bluetoothモジュールからのデータをダンプするだけのプログラムを動かしてみると、ちゃんとデータが来ていました。
(当日はこれすらもやる余裕が無かったのでした)
で、MSP(Motion Script Player)のデバッグログをデバッグレベルを上げて見てみると、こちらもちゃんとデータが取れていて、さらに受信コマンドのパース&実行まで動いてる。
(操作側からは「指示動作を格納する変数への動作名の代入」というコマンドを送信しています)
「変数に値が入っていない??」と思って、変数一覧を表示させてみるけど、ちゃんと値は入っている…
…
…
あれ?
格納値の末尾がなんか変…って、LF(0x0A)が入って…
orz 送信文字列の末尾の改行を落とし忘れてるじゃん!ばかっ!
(当然スクリプトの次動作チェックで、「指示に一致する動作なし」になって、ずーっとアイドル状態)
---
なお、
中村博士との対戦 でパンチが出なかったのは…
「新しく作ったスクリプトの転送忘れ」
が原因。
でも、結局作ってあったスクリプトはCE(Call if equal) と CA(無条件Call)を間違えていて、起動すると延々と左右パンチを繰り出すダメスクリプトだったのでした。
(もう少し人間に判りやすい命令体系にしようよ…)
---
明日、この二箇所を修正して日曜日にはろぼとまへ遊びにいこうかな。
…と言いつつ、天気がよかったら箱根へ温泉ドライブになるかも。
[
☆コメント ]
[
△先頭へ ]
★ 15:43
やっぱり組み込みボードとかもユーザ登録すべきなのか
組み込みボードに限らずノートPCすらユーザ登録していないわけですが…
kinnekoさん日記(2008-11-04) を見て「あ、やっぱり登録したほうがいいのかな」と思った次第。
そういえばリポの充電器も
ユーザ登録してなかったのでファームアップサービスの連絡が来なかった んだっけ。
販社に連絡してみなきゃ。
[
☆コメント ]
[
△先頭へ ]
2008/11/06
ロボファイト8でのゴーレムくんのバトル動画。
★一回戦:対 EXCELION (羽柴さん)
もたもたしているうちに秒殺。
「今回はちゃんと起きれるんだいっ!」と起き上がりモーションを実行するも前側に転倒。「まだまだっ」と寝返りして再度起き上がろうとするけど、やはり前に転倒して終了。(10カウントが20秒くらいありますね:笑)
☆敗者復活戦一回戦:対 MgROSS (富山大学創造工房さん)
一回戦での失敗を踏まえて起き上がりモーションを修正(重心を少し後ろに)
近寄ってこない相手ににじり寄ってにじり寄って押し倒し。
相手が操作ミス(?)で10カウント以内に起き上がれずKO勝ち!
(いつものゴーレムくんの負けパターンの逆でした)
★敗者復活戦二回戦:対 ライガー改 (姫路ソフトワークス 中村さん)
以前に作っていた左右パンチモーションを組み込んでいる途中で名前をコールされて、テストする間もなく試合開始。
重量差に助けられてライガーの攻撃をしのぐものの、テスト不足でパンチを出せず、相手のスリップ待ち作戦。
が、起き上がり直後のバランスが不安定でゴーレムくんもぱたぱたスリップしてしまい同ポイントで延長戦へ。
最後はライガー改のにじり寄り攻撃でリングから落とされて終了となりました。
---
前後移動の歩幅が小さくてかっこ悪いです。
足踏み周期も短すぎて変。
あと、バランス制御をもっと調整しないと話にならない…
(ジャイロフィードバックの調整が足りないので、補助的にPCからも前後のバランス調整を指示してます)
---
ほりさん 、
桃色兎さん 、動画ありがとうございました。
[
☆コメント ]
[
△先頭へ ]
2008/11/03 X+1
「あいかわらず有線操作」とか「パンチすらできず相手を押し倒しただけ」とか「足がちゃんと上がってない」とか、カッコ悪いとこばかりですが…
まあ、とにかく「一勝」しました。(敗者復活戦で)
もっとかっこよく戦えるよう精進せねば。
動画は手に入ったらアップします。
---
行きの新幹線でモーションを見直していて、横移動時の軸足ひざサーボの角度補正(片足保持でサーボが負ける分の補正)が間違っているのを見つけられたのが勝利の鍵だったかも。
でも、同じく新幹線の中で作った無線操作系はうまくデータ受信できなくて使えませんでした。
[
☆コメント ]
[
△先頭へ ]
2008/11/02 X-0
★ 1:35
X-10h 仰向け起き上がり&右方向寝返り完成
右旋回も完成。
左旋回と左方向寝返りは新幹線の中で。
(反転フィルターを通すだけ)
あとは…無線とジョイスティックまわりが手つかず。
無線部分だけでも新幹線の中で完成させたいけど…。
ここまでの過程で
左ひざサーボ(KRS-2350ICS)がちょっと変(動きが渋い) 左肩ロール軸サーボ(Futaba S3003)こわれかけ(ガリガリという異音&トルク半減) 吊り下げ用フック左側破損 なんか、左側ばかり壊れてるような
出発は7:30なので4時間くらい寝られそうです。
---
あ、攻撃モーションが何も無い…
[
☆コメント ]
[
△先頭へ ]
2008/11/01 X-1
動きが渋くなってきた感じ。
右移動、右旋回が不安定なのはこのせい…かな。
左ひざだけ、片足保持のときの補正値を増やせばなんとかなる…かな。
少なくとも、今からバラしてギヤ洗浄する猶予がないのは間違いない。
[
☆コメント ]
[
△先頭へ ]
木枯らし1号、東京に吹く…去年より17日早く 11月になったとたんにそれかよっ!
…と言っても日中はすごい青空でぽかぽかとしたいい日でした。
夜は冷えそうな気がします。
---
進捗は極めて悪いです。
前後左右移動にこだわっているうちに起き上がりモーションを作る時間が…
[
☆コメント ]
[
△先頭へ ]
2008/10/30 X-3
正確には2日と13時間。実質明日の夜と土曜日なので2日もない。
右移動がおかしいのは左膝のケーブルがどこかで接触不良になってるみたい。
バラして組み直したら直ってしまったので、こちらも爆弾抱え状態。
左右移動はどちらも三歩目あたりから上体の左右の揺れが大きくなって不安定になっちゃう。二歩ごとに足踏みを挟むようにすればとりあえず逃げられるかな…
すべり足だったら吸収されてしまうのかも。
やっぱりこれって重心位置で倒立振子計算してるからかなぁ…前後に比べると左右方向はモーメント大きいし。
まあでも今回は先送り。「完璧よりも完成 (c)SISOさん」を目指さないと。
残る必須作業は無線系と裏表起き上がり。
[
☆コメント ]
[
△先頭へ ]
★ 12:46
(NEWSメモ) 九十九電機,民事再生手続きを申し立て。事実上の破綻か
IRC経由
九十九電機,民事再生手続きを申し立て。事実上の破綻か [
4Gamer.net ] から
PCショップ「ツクモ」各店を運営する九十九電機株式会社は,本日10:00に東京地方裁判所に対して民事再生手続き開始決定の申し立てを行い,受理された。負債総額は約110億円(2008年8月末日時点)。
これは…各方面に色々影響が出そうな…
ロボット王国とか縮小対象になりやすそう…
--- 2008/10/30 17:15 追記
AKIBA PC Hotline から
ツクモが民事再生を申請 店舗を営業したまま再建の意向
ショップは現在営業中で、「営業を続けたまま再建したい」(同社)意向。また、ショップ店頭の説明によると、「ポイントカードの扱いを含め、営業体制に変更はない」という。
頑張ってください。(いつもちょっとしか買い物しないけど)
[
☆コメント ]
[
△先頭へ ]
2008/10/29 X-4
後退・左右移動のモーションがなぜかうまく動かずに暴走(他のモーションの処理に飛び込んでしまう)していて、先週末からずっと悩んでいたのだけど…
原因は「スクリプトファイルの最終コマンドの末尾に改行が入っていない」ことでした。メモリに展開したときに次のスクリプトの先頭行とくっついてしまって、パーサが誤動作してました。
以前に(春のロボファイト?)この問題を見付けた時にローダー側で対処したと思ったのだけど…放置されていた模様。
右移動だけちょっと不安定なので、スクリプトがおかしくないか要チェック。
あとは、裏表起き上がりと防御・攻撃モーションかな。
外装を綺麗にする余裕は無さそうね。
---
無線処理系のコーディングは並行して作業中。
でも、今日は偏頭痛がするのでさっさと寝ます。
[
☆コメント ]
[
△先頭へ ]
「んじゃ受信処理つくろっか…」と思ってソースを見ると、シリアルから受けとったコマンドをインタプリタに投げるプログラムはすでにありました。
しかも作成コメントは去年の5月。
去年の自分に感謝。
…がしかし、動かしてみると、受信データは読めているのにインタプリタが処理しない。
????と、ソースを読み直すと…
・受信データ取り出し&デバッグ出力
・受信データのパース、MSP制御 or インタプリタ投入
のルーチンはあるけど、ディスパッチャから呼ばれているのは取り出し側だけ。しかも、受信データを連結してコマンドを組み立てる部分がないじゃん。
むー…。実質あと3日なのに…
まだ起き上がりのモーションも作らなきゃなのに…
さらに攻撃・防御モーションも作らなきゃなのに…
[
☆コメント ]
[
△先頭へ ]
2008/10/28
今回はアパヴィラホテル谷町四丁目にしてみました。
チェックインして荷物を放りこんだ後で懇親会に行くつもり。
問題は「日曜日に早起きして7:40の電車に乗る」なんて可能なのかどうか。
土曜日に京都観光して大阪に泊まったほうがいいかも。
[
☆コメント ]
[
△先頭へ ]
★ 22:57
サーバーエラーなら500番台のステータスコードだろうに…
サーバ障害で表示できないのなら「申し訳ありません」画面に適したステータスコード返してよ…
LivedoorもGeocitiesも楽天も!!
あと、メンテナンス画面もそれなりのステータスコードが返るように設定してほしい。
参考:
HTTP Status Code [studying HTTP]
[
☆コメント ]
[
△先頭へ ]
2008/10/27
★ 22:03
搭載状態でのBluetooth動作確認完了
あとは受信データを MSPのshellに放りこむようにすればとりあえず動作する…はず。HeartBeatを兼ねて1秒ごとくらいにバッテリー電圧を送信させようか。
メッセージ通番とチェックサムを付けてエラーチェックくらいしたほうがいいかな…?前の無線モジュール用に作ったパケット処理部分が使えるといいんだけど。
接続手順メモ:
AG-BT20E通電。後頭部から赤ランプ[RADY]の点滅→点灯確認 仮想COMポートを開いて接続 仮想COMポートを開くだけで接続できるのは、機器登録時の設定で「自動接続」を選んだから。東芝のBT設定ツールのデフォルト動作(プリンストンのBTモジュールは東芝製)
---
一休みしたあと、受信側プログラムの調整
[
☆コメント ]
[
△先頭へ ]
★ 19:00
シリアル通信 via Bluetooth確認完了
浅草ギ研のBluetoothモジュールをMME(まじかるモーションエンジン)に繋いで、プリンストンのUSB Bluetooth(PTM-UBT4)をThinkPadに取り付け。
注意:
AG-BT20Eの速度設定スイッチをちゃんと設定すること(うちのは初期設定の115200bpsのまま) プリンストンのは取り付ける前にドライバをインストールすること 次に、
浅草ギ研のAG-BT20Eの説明ページ の「動作説明」に従って機器登録。
AG-BT20Eに通電して「RADY」ランプ点灯待ち PC側のBT設定ツールを起動(タスクバー通知領域のアイコンから)して機器探索状態に しばらくすると AG-BT20E が見付かるのでシリアルポートの番号を設定 機器登録完了 Teratermでテスト。
Teratermでシリアルポート(デフォルトだと COM40)を開く。
→ AG-BT20Eの「LINK」ランプが点灯。
Armadillo側で stty 115200 /dev/ttyS1 したあと、cat /dev/ttyS1
Teratermから文字を入力して改行すると…
無事、Armadillo側で表示されました。
これでようやく無線でコントロールできるようになるかなー。
[
☆コメント ]
[
△先頭へ ]
★ 15:26
組み直したら通信エラーも直ってしまいました
ああ、これで真相は闇の中。
オーロラフィールドきらめく空の彼方。
いつまた顕現するか判らない恐怖の中で大会に出るしかない。
(おおげさ)
[
☆コメント ]
[
△先頭へ ]
★ 14:41
CPUボード単体では送受信とも正常
CPUボードのピンに直接つなぐと送受信ともちゃんと動作。
…となると悪いのはコネクタまでの配線?
---
ワニ口クリップよりもピンを引っかけるやつ(オシロに付いてるような)が一杯あるほうが便利な模様。
反対側がブレッドボードに付けられるようなのってあるかな。
昨日気づいていれば秋葉で探したのに。
[
☆コメント ]
[
△先頭へ ]
無線系の作業以前にUART直結で受信ができないじゃん。
(送信はできるのに)
配線がおかしいのだと思うので、一度分解してCPUボード単体での試験からやりなおし。
---
今日は派遣先の設立記念日でお休み。
山中湖、箱根あたりへドライブ&温泉に行こうかと思ってたけど、
ライブカメラ 見ると曇ってるので中止して、お家で作業。
[
☆コメント ]
[
△先頭へ ]
2008/10/26
ということで買ってきました。
プリンストンのはClass1だけど、モジュール側はClass2なので到達距離は結局10mかな。
晩御飯の後、すぐに接続試験。
首都高速がガラガラで用賀から神田橋まで15分くらいでした。
家から秋葉までが35分くらい。
ガソリン高騰の影響がまだ残ってるのかな…
(高騰対策はうやむやにして無くなってしまいそう)
[
☆コメント ]
[
△先頭へ ]
このままでは週末に間に合いそうにないので…
王国へ
浅草ギ研のBTモジュール を買いにいきます。
[
☆コメント ]
[
△先頭へ ]
2008/10/23
★ 12:41
第15回ROBO-ONEでは予選がなくなってしまうらしい
第15回ROBO-ONE軽量級選抜大会 公式ページ
第15回ROBO-ONEは、軽量級選抜大会です。
ということになるみたい。
私が不思議な賞をいただいた 時になんとなく予想はしていましたが…
(懇親会や総評のときの西村代表の言葉からも)
ゴーレムくんの資格審査通過は叶うことのない夢となりました。
ROBO-ONEのリングに立てたのは、資格審査が無かった第3回大会が最後。
#予選に色々な発想で作られたロボが集まるのが楽しかったのに…
--- 2008/10/23 12:54 追記
認定大会 の規則も変更になってるみたい
・決勝出場権を得た操縦者は、出場権を得たロボット以外での第15回ROBO-ONEへの出場はできません。
が肝でしょうか。
認定大会は半強制的に「軽量級大会」になってしまうのかな?
[
☆コメント ]
[
△先頭へ ]
2008/10/20
★ 14:19
(NEWSメモ) マウスもキーボードも触らずにUSBカメラでPCを操作するTouchless技術
MS、WebカメラをPCの操作インターフェイスとするSDKをオープンソースで公開 [slashdot.jp]
今回公開されたデモは4種類。あらかじめ登録しておいた対象物の動きをWebカメラでトラッキングし、その軌跡に線を引くものや、動きに合わせて画像を表示/変形させるもの、動きに合わせて画面上の「Snake」の動きをコントロールするもの、対象物を動かしてボールを打ち返すピンポン風ゲームといったものだ。
むうううう…面白そう。
カメラをロボに載せて、無線経由のリモートブレインで処理して、ロボにフィードバックすると色々遊べそうです。
(USBで使えるワイアレスカメラがあればすぐにできる?)
OpenCVで同じことをやると大変なのかな…(まったく調べていないのでわからない)
ああ、またやりたいことが山積みに…
参考:
Project: Touchless [Microsoft Office Labs]
MS、マウスもキーボードも触らずにUSBカメラで操作する「Touchless Demo」公開 [窓の杜]
[
☆コメント ]
[
△先頭へ ]
昨日は午後からろぼとま。
15時頃に着くつもりが出発が15時になり、到着したのは16時過ぎ…
…みんなNHKの収録に行ってしまったのか、誰もいませんでした。
早速ゴーレムくんをセットアップして動かそうとしたら、後ろにバランスがずれていて足踏みすら不可能な状態。
…
…
ひざフレームとサーボを固定している4つのネジが全部緩んでました。(ひとつは行方不明)
「ああ、ゴーレムくんもようやくネジが緩んでしまう子になったのね」とひとりで感動(馬鹿
大会前にバタバタと作ったプログラムやモーションを整理して、前進と後退がちゃんと動くのを確認して…とやってたらガンダム00が始まってしまい、ついつい見てしまったので30分程作業停滞。
前後左右、表裏起き上がりまで作成したかったのだけど、結局、現状復帰だけで終了。
11/2のロボファイト までに左右と裏表起き上がりと無線操縦系を終わらせなきゃいけないのに…間に合うかな…
あと、ROBO-ONEのときに撮ったゴーレムくんがあまりカッコ良く写っていなかったので、ろぼとまのリングを借りて撮ってきました。
腰部分の外装も早く作ってあげたい。
[
☆コメント ]
[
△先頭へ ]
2008/10/19
★ 14:18
(URLメモ) 固定小数点演算で微分方程式を解く&平方根を求める
Robot製作日記 (千葉工業大学文化会総合工学研究会 あおのりさん) から
予選での失態・・・・・・・・・あと固定少数点で微分方程式解けるようになった
以前ルンゲ・クッタ法での微分方程式を数値解析的に解く方法を試みましたが、計算にかかる時間により一時断念していました。
ルンゲ・クッタ法ってよく名前を聞くのだけどなんのことだか判ってない。
もっと勉強しないと。
最近、予選日は自分のロボの準備で手一杯で、他の人のロボをじっくり見られなくなりました。控え室に入るのが一番の参加目的だった(!?)はずなのに本末転倒。
平方根の解法は、4、5年前に誰かが日記にコメントしてくれていた気がする…かも。(活用できていなくてすみません)
---
今日はこれから「
ろぼとま 」へ行ってモーション作成。
[
☆コメント ]
[
△先頭へ ]
2008/10/18
★ 23:20
熱中夜話からメール&関東組練習会#33
11/13,20がホビーロボットの回で収録は明日
今日の未明に届いてたみたいですが…
spamメールに振り分けられてました(笑
でも、やらなきゃいけないことが溜ってるので無理。
そもそもちゃんと動くロボットないしね。
返事しておかなくては。
まだ出演者足りてないのかな…
関西方面から人を呼べばいいのに…と思ったら交通費が出せないらしい。
---
今日は早稲田の大久保キャンパスで練習会。
アクリル板で作ったリングの下に布を張って、プロジェクターで色々なパターンを投影する仕掛けになっていて綺麗でした。
このリングを使って
11/3にロボットバトル大会 を行うそうです。
[
☆コメント ]
[
△先頭へ ]
2008/10/14
自分の反省はまた後で。
二回戦以降を見た感想。
「重量級も軽量級もつまらなかった」
「やっぱりROBO-ONEは予選のほうが面白い」
ロボットが立ち止まって両腕を水平にぐるぐる振り回す攻撃ばかり。
なんか、ROBO-ONEのロボットって最近退化してない??
重心規定が厳しくなって機体のバランス制御が難しくなって、軽快に動きまわれなくなったのだと思うけど。
そういう事情を知らない一般の観客の目に、あのバトルは面白く映ったのでしょうか。
スーパーヘビー級ロボは、相手が同クラスじゃないと見ていて面白くない。
あれじゃ競技じゃないもの。
競技規則には反していないので製作者を咎めても仕方がないでしょう。
でも、
大きなロボを作るのなら、もっとカッコよく戦ってよ! というのが本音。
その大きさに見合った制御・モーションができていたでしょうか。
そのロボットを持ち込んでカッコいいバトルになったでしょうか。
次も同じ機体で出るのなら、もっとキビキビ動くようにしてきてほしい。
あと、ROBO-ONE委員会は申込受理時に何も検討しなかったのでしょうか。あれの参加を許すのなら、同クラスのロボが4体は決勝に出ないとこういう展開になるのは見えていたと思うのですが…
重量級にも上限を設けないと、大型化競争になるだけでしょう。
クラス分けについては
先川原さんも気にされている ようなので委員会で何か動きが出ることを期待します。
どうしても参加者視点で見てしまうけど、「ホビー用二足歩行ロボ業界を発展させるには」という視点から見たら、今の状況は良いのか悪いのかどっちなんでしょうね。
---
え?「そういう意見はROBO-ONE討論会で言えよ」って?
金-土で徹夜したあと日曜も遊んでたので、反動で今日一日ベッドと仲良しだったんですよっ
[
☆コメント ]
[
△先頭へ ]
2008/10/13
ロボファイト8 今日が〆切らしいけど、ORCはエントリー数何台になるんだろう…
10/5の集計時点で9台 しかいないんだけど。
翌日はSRCをちょっと見てから帰ろうかな。
嵐山に寄っていきたいけど荷物が重いのが難点。
---
ロボットフォースのページは記事のエントリごとに <a name= が付いてるといいのに…
(ページから消えちゃうと無駄になるけど)
[
☆コメント ]
[
△先頭へ ]
2008/10/11 X-0
ゴーレムくんは
資格審査のスロープ が登れなくてリングには出られませんでしたが…
あまりの失格者の多さに途中でルールが変わって、「頂上にたどり着けば合格」になったのだけど、それでもクリアできませんでした。(歩数や時間で坂道にあわせたモーションを作ればいけたかも)
まあでも、関東の人達にもゴーレムくんがちゃんと歩けているところを見せられて良かったです。
これでようやく「棄権」から「失格」に昇格。(?)
で、なぜか「ROBO-ONE SHOP賞」を受賞してしまいました。賞品は「
ROBO BUILDER 」
予選に出られなかったのに賞をいただくのってROBO-ONE史上初のような…
(もしかして最多エントリー&最多棄権賞?)
…できれば予選にでて受賞したかった…
けど、受賞できたのはみんなの応援や助言でずっと続けてこられたからだと思います。ありがとうございます。
---
重量級の予選トップは「グレートキングカイザー」でした。
決勝の組合せ がもう公開されていますね。
…眠いのでさっさと寝ます。
[
☆コメント ]
[
△先頭へ ]
2008/10/10 X-1
「完了」といってもシェルスクリプトでスイッチの状態を読み取れるようになったところ。
ふたつのスイッチの状態に応じたコマンドをモーションエンジン側に投げればモーションの分岐ができる。
規格審査と、資格審査(スロープ)と、予選の3つを選べればいいだけだから簡単…なはず…だけど…
これからマイクロSDカードアクセスに手をつけてたら、ろぼとまへ行く暇がなさそう。
マイクロSDは諦めて、前回と同じく「ArmadilloのRAMに読み込んだらリセットしないように注意して運ぶ」にしたほうがいいかな…
(リセットしたらさようなら。バッテリーが上がってもおしまい)
[
☆コメント ]
[
△先頭へ ]
★ 2:48
X-1d6h 今晩の作業(スイッチまわりのチェック途中)
帰宅して「さあ作業しよっ」と、CPUユニットをゴーレムくんからブレッドボードに移して、3.3V電源をつないでテスト…
…と思ったら3.3VのACアダプタが行方不明…
30分ほど腐海を探険したけど見付からない。
諦めて5VのACアダプタ+3.3Vレギュレータでテスト環境構築。
(背中側から見て)右側のスイッチは
GPIO操作コマンド での正常動作を確認。
左側のスイッチはまったく応答せず。
基板に貼っていた絶縁テープをはがしてみると…
左側のスイッチは配線してなかった…
orz さらに右側のスイッチは動いているけど、実はプルアップを忘れてる。
明日(今日)は、午前中にはんだ付け作業を終わらせて、午後からはろぼとまでスロープ攻略をやらないと。
加速度センサーにローパスフィルタを付けておいたほうがいいかも。
[
☆コメント ]
[
△先頭へ ]
2008/10/09 X-2
★ 14:46
X-1d18h (URLメモ) 相等単振り子、剛体振り子、慣性モーメント
★ 1:16
X-2d7h 今晩の作業(サーボ交換完了&動作確認)
交換とあわせてスパイラルチューブの巻直しとかしてたので時間がかかってしまいました。
本当はマイクロSDアクセスモジュールの試験もしたかったのに…
明晩にはマイクロSDモジュールとスイッチと確認用LEDの配線を終わらせて、金曜日はモーション作成に専念したいところ。
…といっても、スロープ対応モーションですが。
外装つくってあげてる暇なんて全然なさそう。
月曜日に調子悪くて作業できなかったのが痛い…
[
☆コメント ]
[
△先頭へ ]
2008/10/06 X-4
★ 22:44
重量級は3kgを越えたとこかららしい
第14回ROBO-ONE Q&A を良く読んだら、「基本的に3kg以下が軽量級となります」と書いてあったので、「
ROBO-ONE登録選手一覧 (14th 参加者) 」の重量級カウント方法を修正しました。
(これまでは3kg以上を重量級とカウント)
3kg近辺では選手がどちらにするかを選べるみたいだし、3kg以下でも重量級に出られそうな気もするので、確実な値ではないですけど。
電通大ロボメカ工房のマシンも次々に重量が確定している(完成した?)模様。
えまのんさんのキャバリアが2.9kgというのがちょっと驚き。
もしかしてこれまではおもりを載せてた??
「重心測定のときには腕を水平よりも下にする」(突起物がなければ腕を水平にしてもいい)
というところに「それってどうなの??」と思う今日このごろ。
まあ、腕先を重くして重心規定をクリアしても、腕の重さに引きずられて動かしにくいでしょうけど。
---
ゴーレムくんは一号機の頃から、重心は股関節ピッチ軸よりも上にあります。
もちろん腕を身体に沿わせた状態で。
[
☆コメント ]
[
△先頭へ ]
2008/10/06 X-4
★ 0:41
今晩の作業(燃えたサーボを降ろすとこまで)
左脚の股関節部をばらして、(たぶんFETが燃えた)左股関節ヨー軸サーボを外した…
ところで、「左側を2144から2346に交換したら右側も交換しなきゃいけない」ということに気づく。
うう、股関節部の分解面倒なのに…
今晩は左側を外すところまでで時間切れ。
右側も外してしまうか、部品箱からまだ動く2144を発掘するか、どうしようか。
[
☆コメント ]
[
△先頭へ ]
2008/10/05 X-5
★ 22:25
坂を登るだけならなんとか…なる…かな
秋葉へ行って、来週転勤する友達とお茶して、買い物して…とやってたら、もう六時。
あらら…と慌てて首都高速使って
ろぼとま へ
道が空いていたのと、工事規制がなかった(事故の後の工事ってどうなったの?)のとで30分ほどで到着。(七時ちょっと前)
手直しした前進をリングで試してみると、ちょっと左に曲がるものの、いい感じで動きます。自宅のMDFボード上と動きが変わらないので自宅の環境でこのままテストして大丈夫そう。
で、そのままスロープに連れていくと…
上り坂にさしかかるところで、後ろに転倒。
腕を前に伸ばして重心を前にずらして、スロープ部分で足踏みさせてみたけど、やっぱり後ろに倒れちゃう。
さらに上体を前に傾けて重心をずらしてスロープ部分だけ再チャレンジ。
ん…なかなかいい感じ。
「スロープ部分で足踏みができるようになったー」
と喜んでたら、股関節ヨー軸サーボから煙が…
…お亡くなりになりました。
5年間ずっと股関節ヨー軸を守ってきた2144でしたが、ついに次代に役を譲ることになりました。(といっても手元にあるのは 2346 ICS)
足裏がフルグリップなので、坂道で片足立ちになったときに股関節ヨー軸にかなり負荷がかかるのかも。(それってまだ後ろ重心ってことじゃ…)
…ちゃんと足首ピッチを斜面にあわせて傾けたほうがいいんだろうか…
その後、股関節ヨー軸がふらふらのままだけど、坂道を登れることまで確認できました。
次の課題は、平地から斜面にさしかかるところの判定と制御かな。
サーボも交換しなきゃだし、スイッチ回路も作らなきゃいけないのに、スロープ攻略までいけるんだろうか…。
[
☆コメント ]
[
△先頭へ ]
2008/10/03 X-7
★ 18:33
ActiveBoy (2分Ver.)
2Mbyteもあるファイルをメールで送るのはやめてほしい…
(homeの空き容量が1Gbyteもない環境を使っている私が変なの?)
[
☆コメント ]
[
△先頭へ ]
2008/10/02 X-8
春の残作業リスト(2008/03/19) よりはましになった…かな
☆やらなきゃいけないことリスト
優先度高(最低限の機能の実装) スクリプトからのスイッチ読み取り実装&テスト 基本モーション作成 前進、仰向け起き上がりの調整 後退、左右移動、左右旋回、うつぶせ起き上がりの作成 優先度中(資格審査スロープ対応) 加速度センサー値&ジャイロ値からの斜面判定 不足であれば足首サーボの角度取得(PIC側機能追加) 斜面方向による姿勢制御(上半身ピッチにより重心位置をずらす等) 優先度低(予選デモ対応) スロープと予選デモの切替え(スイッチまわり) 転倒判定 転倒時自動起き上がり 優先度最低(決勝対応) 無線モジュールとの配線と送受信処理のチェック 無線経由での制御コマンド受付 せめてパンチモーションだけでも… ロボファイト6前のTODO(2007/11/05) とか
足踏みの安定化案(2008/05/06) も要確認
GPIOの操作は
GPIO操作コマンドの使いかた(2008/03/27) を参照
ActiveBoyのテンポは
ACTIVE BOY (2分Ver)(2008/03/14) を参照
☆作業方針
スイッチの配線切れ修正とGPIOアクセスは今夜中に片付ける。 モーションはこまいことを気にせずとりあえず作る。 センサー値をデバッグログとは別にUDP経由で取得できるようにする。 ログにはTickとは別に経過時間が出るようにする。 任意の区間のセンサー値の平均値、微分値、積分値等を計算するプログラムを作っておく。 土曜日に水平面歩行時のセンサー値の変化を取得してテスト。 日曜日の午後にろぼとま でスロープでのセンサー値の変化をチェック 月曜から木曜まではちょこっとずつがんばる。 金曜は有休とってがんばる。 ---
昨晩無理したせいか、今日一日ベッドと仲良しになったのが想定外。
[
☆コメント ]
[
△先頭へ ]
★ 2:48
進捗 (700mAh 30C では不足みたい)
満充電でも足踏み6分間でギブアップ。
やっぱり並列にしないと無理か…
[
☆コメント ]
[
△先頭へ ]
2008/10/01 X-9
★ 18:44
エントリー数 114台 (重量級 26, 軽量級 74, 重量未記入 14)
締切り時点で
エントリー数 114台 になったみたい。
14台が重量未記入。
重量級と軽量級にわかれるんだから、未完成でも目安の数字くらい入れようよ…
13回と12回はエントリー112台だったかな。
市販機そのままじゃ出られないからこれくらいの数になっちゃうのかな。
---
端数切り捨てにしたら残り9日しかないよ… (実際は 9日と14時間)
[
☆コメント ]
[
△先頭へ ]
★ 1:55
今日の作業 (新リポ動作確認&起き上がりモーションチェック)
新しく調達した ハイペリオンHP-LVZ0700-2S (7.4V 700mAh)での動作チェック。
30C流せるから1パックだけで動けば上半身を60g軽くできるんだけど…
…と考えてたら、あっという間に6Vを切って終了。
買ってそのままだったからあまり充電されてなかったのかな?
充電しなおして明晩に再チェック。
次は起き上がりモーションのチェック。
ロボファイトでの無惨な転倒 の後、ちゃんと起き上がれるように直したはず…なのに今度は後ろに倒れるように…
orz モーションの途中にポーズを入れて確認してみると、STEP8でちゃんと起き上がれているのに、STEP9で前重心になって、STEP10では後ろ重心になって、STEP11で足をグンと伸ばして後へふっ飛ぶ模様。
STEP9以降を再チェック。
[
☆コメント ]
[
△先頭へ ]
台風が来ないまま一気に秋になってしまいました。
また寒い季節に…
[
☆コメント ]
[
△先頭へ ]