§Þ§∏§´§Î°˘•Þ•Í•™•Õ•√•»: ≥´»Ø∆¸ªÔ (2006 2Q)
TOP
2021«Ø: 1Q
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø
2021«Ø: 1Q
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø
| 2006/06/28 X-53 | |
|
°˙ 20:12
(∫Ó∂»•·•‚)•œ•√•∑•Â•∆°º•÷•Î§Œº¬¡ı ˝À°
•‚°º•∑•Á•Û¿©∏Ê•◊•Ì•∞•È•ý§À —øÙ§»•È•Ÿ•Î§Úº¬¡ı§π§Î§ø§·§Àœ¢¡€«€ŒÛ§√§ð§§§‚§Œ§¨Õþ§∑§§§«§π°£ ∏ª˙ŒÛ§Ú§¿°º°º§√§»∏°∫˜§µ§ª§Ë§¶§´§»ª◊§√§∆§§§ø§±§…°¢•œ•√•∑•Â•∆°º•÷•Î§Œ§€§¶§¨§§§§§Û§«§π§Ë§Õ°ƒ§ø§÷§Û°£ Google∏°∫˜•≠°º•Ô°º•…°÷C∏¿∏Ï •œ•√•∑•Â•∆°º•÷•Î •¢•Î•¥•Í•∫•ý°◊ ɬͧœ§€§»§Û§…§Œ•Ω°º•π§À•È•§•ª•Û•π§¨ΩÒ§´§Ï§∆§§§ §§§≥§»°ƒ •¢•Î•¥•Í•∫•ý§¿§±§§§ø§¿§≠§Þ§π°£ --- §Ω§≥§√°™°÷§Þ§ø√¶¿˛§∑§∆§Î°◊§»§´∏¿§Ô§ §§§√°™ •‚°º•∑•Á•Û∫∆¿∏ΩËÕ˝§À•∏•„•Û•◊§»æÚ∑Ô»Ω√«§Úº¬¡ı§∑§ §§§»•‚°º•∑•Á•Û∫Ó¿Æ∏˙Œ®§¨∞≠§Ø§∆¿Ë§Àø §Þ§ §§§Û§«§π§Ë°£ --- 2006.06.28 22:30 Ω§¿µ ∏°∫˜•≠°º•Ô°º•…§Ú "C∏¿∏Ï •œ•√•∑•Â•∆°º•÷•Î •¢•Î•¥•Í•∫•ý" §ÀΩ§¿µ°£ (§≥§Œ§€§¶§¨∏°∫˜∑Î≤稧§§§¥∂§∏) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/27 X-54 | |
|
°˙ 1:07
ΩµÀˆ§Œø ƒΩ °ı ≈ðŒ©ø∂ª“•∑•þ•Â•Ï°º•ø§ŒÃ‰¬Í≈¿
∫Ó∂»°ƒ¡¥¡≥ø §Û§«§Þ§ª§Û°£(…˜ºŸ§ §Û§´§“§Ø§´§È°ƒ) §∑§´§‚∫£∆¸(§»§§§¶§´∫Ú∆¸)§Œ§™√εŸ§þ§Àøß°ππÕ§®§∆§§§ø§È°¢∫£§Œ≈ðŒ©ø∂ª“•∑•þ•Â•Ï°º•ø§À¬Á§≠§ ∑Á¥Ÿ§¨§¢§Î§≥§»§Àµ§…’§§§∆•∑•Á•√•Ø«Ð¡˝°£ ‚π‘√ʧÀπ¯§Œ§»§≥§Ì§ÀΩ≈ø¥§¨§¢§Î§≥§»§Ú¡€ƒÍ§∑§∆§§§ø§Œ§¿§±§…°¢Œ…§ØπÕ§®§∆§þ§Î§»°¢µ”§Ú∏§ÀΩ≥§Í§¿§∑§øª˛§Àæ»æø»§»º¥¬≠§œ"§Ø"§Œª˙§À§ §√§∆§Î§´§ÈΩ≈ø¥∞Ã√÷§œπ¯§∏§„õ§Ø§ §√§¡§„§¶§Ë§Õ§ß°ƒ §¶°º§Û°ƒ§…§¶§π§Ï§–°ƒ •—°º•ƒÀ˧ŒΩ≈ŒÃ§»Ω≈ø¥§Ú¬¨ƒÍ§∑§ §≠§„§¿§·§´§∑§È°ƒ § §Û§∆«∫§Û§¿§»§≥§Ì§«Ω≈ø¥∞Ã√÷§œøÙ•þ•Í§∑§´∞„§Ô§ §§§¿§Ì§¶§∑°¢π‰¿≠§Œ§ §§§’§À§„§’§À§„•Ð•«•£§«§œ¥ÿ∑∏§ §§§Œ§´§‚°£ ∏Ì∫π§¨Ω–§ø ¨§œ•∏•„•§•Ì§« ‰¿µ§µ§Ï§Î§√§∆°¢§≠§√§»°£ (°ƒ§∏§„§¢≈ðŒ©ø∂ª“•∑•þ•Â•Ï°º•ø§Œ∞’㧠§§§∏§„§Û) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/22 X-59 | |
|
°˙ 23:20
(•·•‚)16bit…‰πÊ…’§≠¿∞øÙ§Œ¿Î∏¿
°÷≥—≈Ÿæ Û§Ú16bit§ÀµÕ§·π˛§þ§ø§§§ °º°◊§»ª◊§√§ø§Œ§«§¡§Á§√§»ƒ¥§Ÿ§∆§þ§ø°£ §≥§Ï§¨¿µ§∑§§ ˝À°§´§…§¶§´§œ»Ω§È§ §§§±§… sys/types.h §À typedef short int int16_t; §»§§§¶§Œ§¨§¢§√§ø§Œ§«§≥§Ï§Úª»§¶§»º¬∏Ω§«§≠§Ω§¶°£ •∆•π•»§∑§∆§þ§ø§È sizeof(int16_t): 2§«§∑§ø°£ --- 2006.06.26 13:36 ƒ…µ≠ Porch§µ§Û§Œ•≥•·•Û•» ∑–Õ≥ •◊•Ì•∞•È•þ•Û•∞∏¿∏Ï C §Œø∑µ°«Ω (stdint.h) §´§È intN_t …‰πÊ…’§≠¿∞øÙ∑ø§Œ typedef Ãæ §«°¢ªÓ§∑§∆§þ§Þ§∑§ø°£(with gcc 2.95.3:∏≈) sizeof(int16_t) : 2 sizeof(uint16_t): 2 §¡§„§Û§»ª»§®§Ω§¶§«§π°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:50
ø ƒΩƒ‰¬⁄√Ê
§ §Û§«§≥§Û§ §Àø»¬Œ§¨•‰•Ô§ §Û§«§∑§Á§Õ°£ ª“∂°§Œ§≥§Ì±ø∆∞§∑§ §´§√§ø•–•¡§«§∑§Á§¶§´°ƒ £øÙ§Œ ˝§´§È °÷°ÿÀË∆¸§≥§ƒ§≥§ƒ°Ÿ§√§∆√Ÿ§Ø§Þ§«µØ§≠§∆§∆°¢≈⁄∆¸≈ð§Ï§∆§ø§È∞’㧠§§§«§∑§Á°◊ §»§™§∑§´§Í§Úºı§±§ø§Œ§«∫£∆¸§œ§µ§√§µ§»ø≤§Î§≥§»§À§∑§Þ§π°£ ∂·°π§«§‰§È§ §≠§„§§§±§ §§§≥§»•Í•π•»
[°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/21 X-60 | |
|
°˙ 21:56
(URL•·•‚) Windows•Ÿ°º•π§Œ•Ì•Ð•√•»≥´»Ø•◊•È•√•»•’•©°º•ý
ª»§¶§≥§»§œ§ §§§»ª◊§¶§±§…°¢§»§Í§¢§®§∫•·•‚°£ (•’•Ï°º•ý•Ô°º•Ø§‰∏¿∏Ϫ≈ÕÕ§œª≤πÕ§À§ §Î§´§‚§∑§Ï§ §§§∑) K. Moriyama's Diary (2006.06.20) ∑–Õ≥
Robot Watch §´§È Microsoft°¢•Ì•Ð•√•»≥´»Ø•◊•È•√•»•’•©°º•ý°÷Robotics Studio°◊CTP»«§Ú∏¯≥´ °÷§ý•¢•Û•∆• °◊∑–Õ≥ ITmedia News §´§È °÷•Ì•Ð•√•»§Œ∏þ¥π¿≠°◊ÃЪÿ§∑°¢MS§¨≥´»Ø¥ƒ∂≠ƒÛ∂° …·µ⁄§π§Î°ƒ§Œ§´§ §°°ƒ ª‰§œ∆Û¬≠ ‚π‘•Ì•Ð•√•»§∑§´§‰§√§∆§ §§§Œ§«»Ω√«§ƒ§´§ §§°£ ∏¿∏Ϫ≈ÕÕ§À§Þ§«ΩÍÕ≠∏¢§¶§Û§Ã§Û∏¿§§Ω–§µ§Ï§Î§»§§§‰§´§‚°£(πÕ§®§π§Æ°©) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/20 X-61 | |
|
°˙ 12:54
≈∑ª»§Œ§π§þ§´°˜Ω©Õ’∏∂VOLKS
∆¸ÕÀ∆¸°¢Œ˝Ω¨≤Ò§Œ§¢§»VOLKS§Àπ‘§√§ø§Œ§œ°¢µ◊§∑§÷§Í§À°÷≈∑ª»§Œ§π§þ§´°◊§«§€§Ô°º§√§»§∑§ø§´§√§ø§´§È°£(°÷BEST OF FSS°◊πÿ∆˛§Œ§€§¶§¨§™§Þ§±) °ƒ§Û§«§‚°ƒ§ §Û§´°ƒ¥∂§∏§¨∞„§√§ø°£ ∞ ¡∞§œ∆˛∏˝§«ªÕ¬Œ§Ø§È§§§ŒSD§¨»˘æ–§Û§«§§§ø§Œ§À√ا‚§§§ §Ø§∆°¢ •÷°º•π§Œøø√ʧÀ§œ•ÿ•√•…¡«¬Œ§¨§∫§È§Í°£ •¶•£•Û•…•¶§À§œ§π§Þ§∑§ø√À§Œª“§»°¢§¡§Á§√§»æÆ ¡§ MSD√£°£ •±°º•π§Œæ§À§§§øÕƒSD§œ§€§Û§»§À≤ƒ∞¶§È§∑§Ø§∆°÷§ƒ°¢œ¢§Ï§∆µ¢§Ì§¶§´§ °ƒ°◊§»ª◊§√§ø§±§…°¢§¡§Á§√§»∞„§¶¥∂§∏°£ •Ô•Û•™•’•‚•«•Î§Œ•¶•£•Û•…•¶§Œ¡∞§«Ã˛§µ§Ï§ø∏°¢§¢§Þ§ÍƒπµÔ§∑§ §§§«Ω–§∆§≠§Þ§∑§ø°£ §Û°º°ƒ ∂‰∫¬§‰ø∑Ω…§Œ§™≈𧂠∑∞œµ§ —§Ô§√§∆§Î§Û§¿§Ì§¶§´°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/19 X-62 | |
|
°˙ 23:53
∫£∆¸§Œ§™«„ ™ (•Õ•ý•≠¡˝¥©°÷¥—Õ—æØΩ˜∆√Ω∏πÊ°◊°¢§Õ§∏§Þ§≠«ÓªŒ§»Ã¬§§«≠)
°÷√÷§§§∆§¢§Î§´§ °º°◊§»…‘∞¬§Àª◊§§§ §¨§È≤Òº“µ¢§Í§ÀπÒ∆ª±Ë§ŒÀÐ≤∞§ÿ°£ 4∫˝§¨ ø¿—§þ§À§ §√§∆§§§ø§Œ§«Ãµªˆ§À1∫˝§Ú ð∏Ó°£ §¢§»°¢º˘¿Ó¿Ë¿∏§Œø∑¥©§‚
[°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 23:46
∫Ú∆¸§Œ§™«„ ™ (BEST OF FSS°÷•Ÿ•π•»•™•÷•’•°•§•÷•π•ø°º ™∏Ï°◊ )
mixi§Œ•≥•þ•Â§«»Ø«‰§Ú√Œ§√§∆°¢Œ˝Ω¨≤Ò§Œ∏ÂVOLKS°˜Ω©Õ’∏∂§«πÿ∆˛°£ Ãΰ¢°÷§¡§Á§√§»§¿§±°◊§Œ§ƒ§‚§Í§«∆…§þ§œ§∏§·§ø§Œ§À°¢µ§…’§§§ø§È≥∞§¨Ã¿§Î§Ø§ §√§∆§Þ§∑§ø°£(¥¿ §Þ§¿≈”√ʧާ«§∑§´∆…§Û§«§§§ §§§Œ§¿§±§…°¢°÷§π§√§¥§Ø§Ë§Ø§«§≠§ø∆±øÕªÔ°◊§√§∆¥∂§∏°£ •≠•„•ÈÀ˧À∞ıæð≈™§ •∑°º•Û§Ú¿⁄§Í≈Ω§Í(?)§∑§∆§¢§√§∆°¢∑«∫Ð¥¨§»•⁄°º•∏§Þ§«ΩÒ§´§Ï§∆§§§Î§Œ§¨§ §™§µ§È∆±øÕªÔ§√§ð§´§√§ø§Í°£ MH§Ë§Í§‚•≠•„•È§Œ•⁄°º•∏§Œ ˝§¨¬ø§Ω§¶°£ ª≤πÕ
[°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/18 X-63 | |
|
°˙ 23:50
¥ÿ≈Ï¡»Œ˝Ω¨≤Ò#9
15:30§À§œ√§اƒ§‚§Í§«≤»§ÚΩ–§ø§Œ§À°ƒ Ω¬¬⁄§Ú»Ú§±§ø§Í°¢ªˆ∏Œ§«π‚¬Ææ˧ϧ §Ø§∆±™≤Û§»§´§∑§∆§ø§È°¢Ω©Õ’≈˛√ 17:00 orz 18:00§Þ§«§¿§√§ø§Œ§«°¢•¥°º•Ï•ý§Ø§Û§Úπþ§Ì§π§Œ§œ§‰§·§∆°¢∏´≥ÿ§¿§±§∑§∆§≠§Þ§∑§ø°£ §Ω§Œ∏°¢VOLKS§ÿ«„§§ ™(BEST OF F.S.S)§Àπ‘§√§ø§¢§»°¢∫©ø∆≤Ò§ÀπÁŒÆ°£ °ƒ§¨°¢≈˛√§∑§∆§§§≠§ §ÍæþÃ˝∫π§∑§Ú≈ð§∑§∆«„§√§ø§–§´§Í§Œ•π•´°º•»§À§≥§Ð§π o...rz ∫£ΩµÀˆ§œ≤ø§´§ƒ§§§∆§ §§°£(§§§‰°¢§≥§Ï§´§È§ §Œ§´) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:34
∫Ú∆¸§Œ§™«„ ™ (•Ì•Ð•≥•Û•Þ•¨•∏•Û No.46 §Ω§Œ¬æ)
∏·∏§´§È»˛Õ∆±°§ÿ°ƒ§»ª◊§√§∆§§§ø§Œ§À≤»§ÚΩ–§ø§Œ§œÕº ˝°£ §‚§¡§Ì§Û»˛Õ∆±°§œ•—•π°£ §Ω§∑§∆•µ•Û•¿•Î§Ú«„§¶§ƒ§‚§Í§«§§§ø§Œ§À°¢§ §º§´ªÊ¬Þ§Œ√ʧœ≤∆ ™§Œ•π•´°º•»°£ § §Û§´§¡§∞§œ§∞§¿§√§ø§±§…°¢°÷•Ì•Ð•≥•Û•Þ•¨•∏•Û No.46°◊§œÃµªˆ§ÀGET°£ §‚§¡§Ì§Û…€∂µ§Œ§ø§·ÀËπÊΩÒ≈𧫫„§√§∆§Þ§π°£ ∫«∂·ÀÐ√™§À§¢§Î∫˝øÙ§¨¡˝§®§∆§§§Î§Œ§œ∆˛≤ŸøÙ§Ú¡˝§‰§∑§ø§´§È§ §Œ§´°¢§Ω§Ï§»§‚°ƒ --- °÷•Ì•Ð•’•°•§•»£≥°◊§ŒΩ∏πÁºÃøø§«∂˘§Œ§€§¶§ÀºÃ§√§∆§Þ§∑§ø°£(ªÔÃÃΩÈ≈–æÏ°ßæ–) §¡§„§Û§»µ≠ªˆ√ʧ«æ“≤§µ§Ï§Î§Ë§¶§À¥Ëƒ•§Ì§¶°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/16 X-65 | |
|
°˙ 22:36
(∫Ó∂»•·•‚)µ”±ø∆∞•∑•þ•Â•Ï°º•ø§¨•–•∞§√§∆§Î
current §Œ legsym.rb §œ§…§≥§´§™§´§∑§§§Œ§«Õ◊ƒ¥∫∫°£ ∞Ï ‚ÃЧŒµ”±ø∆∞∑◊ªª∏§À•§•Û•π•ø•Û•π —øÙ§´•Ø•È•π —øÙ§ÚΩÒ§≠¥π§®§∆§§§ §§°¢§Þ§ø§œΩÒ§≠¥π§®§∆§∑§Þ§√§∆§§§∆§Ω§Œ∏§Œ∑◊ªª§ŒΩÈ¥¸√Õ§¨§™§´§∑§Ø§ §√§∆§§§Î°£ stable §Œ legsym.rb §»»Ê§Ÿ§∆∏°æ⁄§π§Î§≥§»°£ »Ω§È§ §§æÏπÁ§œ stable §´§È∫ӧ̓æ§∑°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/15 X-66 | |
|
°˙ 14:05
ROBO-ONE Dash §…§¶§∑§Ë§¶§´§ °ƒ
¬Ë4≤ÛROBO-ONE Special≥´∫≈≥µÕ◊ 8∑Ó6∆¸§√§∆§≥§»§œªƒ§Í52∆¸§´°ƒ §Û°º°ƒ --- ≤–ÕÀ∆¸§Àø¶æϧŒ•µ°º•–§¨•»•È•÷§√§∆ÃÎ√Ÿ§Ø§ §√§∆¬Œƒ¥ ¯§∑§¡§„§√§∆2∆¸∫Ó∂»§«§≠§∫°£ •»•È•÷•ÎµØ§≠§ §§§Ë§¶§À§π§Î§ø§·§ÀSE§µ§Û§Ú∏€§√§∆§Î§œ§∫§ §Œ§À°ƒ •»•È•÷•Î§ÚµØ§≥§π§Œ§œSE§µ§Û§«º˝Ω¶§π§Î§Œ§œ«…∏اŒª‰°£ «º∆¿§§§´§ §§°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/13 X-68 | |
|
°˙ 1:54
•–•√•∆•Í°º§ŒµÛ∆∞
õ…È≤Ÿª˛ 7.2V°¢∑⁄…È≤Ÿª˛(•Ì•Ð§Úª˝§¡æ§≤§øæı¬÷§«ƒæŒ©ª—¿™)3V §√§∆°ƒ §Ω°º§§§¶§Œ§‚§¢§Í§ §Œ§Õ°£ ¡∞ø ∞ ≥∞§Œ•‚°º•∑•Á•Û§ÀºÍ§ÚΩ–§π§´°¢•–•√•∆•Í°ºæı¬÷§Œ¥∆ªÎ§»•‚°º•∑•Á•Û ‰¿µ§ÀºÍ§ÚΩ–§π§´°¢§…§√§¡§À§∑§Ë§¶°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 1:02
ÀË∆¸§≥§ƒ§≥§ƒ (¡∞≈”¬ø∆Ò°ƒ)
£◊«’§Ú¥—§ §¨§È∫Ó∂»°£ ¿Ó∏˝§Ø§Û§µ§π§¨§¿°º¥Ëƒ•§Ï°º°™°™§»§ƒ§§§ƒ§§•µ•√•´°º§À∏´∆˛§√§∆§§§ø§Í°£ ∏»氢§§§§¥∂§∏§¿§√§ø§Œ§«ÃЧڌ•§∑§∆§ø§È°ƒ §Þ§°°¢§Ω§Ï§œ≤£§À√÷§§§»§§§∆ \('-'\)(°ø'-')°ø ∫Ú∆¸§Œ ‚π‘¿Æ∏˘§Àµ§§ÚŒ…§Ø§∑§∆°¢∫£∆¸§œ•–•√•∆•Í°º§«§Œ ‚π‘§Àƒ©¿Ô°£ °÷§™§©§√°¢§¡§„§Û§» ‚§Ø§∏§„§Û°◊(§ §º§À≤£…Õ €) °ƒ§»ª◊§√§ø§Œ§‚§ƒ§´§Œ¥÷°¢§¢§√§»§§§¶¥÷§À•–•√•∆•Í°º≈≈∞µ§¨≤º§¨§√§∆§¶§Þ§Ø ‚§±§ §Ø§ §Í§Þ§∑§ø°£ π¯…Ù§Œ≤√¬Æ§Àæ»æø»§¨§ƒ§§§∆π‘§´§ §§¥∂§∏°£ µ”…Ù§¨π¯…Ù ¨(§Ω§Œ§¢§ø§Í§¨Ω≈ø¥)§Ú≤√¬Æ§π§Î§»°¢∏‘¥ÿ¿·•‘•√•¡º¥§¨æ»æø»§Œ¥∑¿≠Œœ§À…ȧ±§∆欌§Ú»ø§È§∑§∆§∑§Þ§§§Þ§π°£ §¡§Á§√§»≈≈∞µ≤º§¨§√§∆•»•Î•Ø∏∫§√§ø§¿§±§«§≥§Œæı¬÷§À§ §Î§Œ§œ∫§§√§¡§„§¶§ °ƒ °÷µ”…Ù§¿§±§«Ω≈ø¥§Ú≤√¬Æ§π§Î°◊§√§∆§§§¶πÕ§®§¨§Ω§‚§Ω§‚ÃµÕ˝§«°¢
§√§∆§§§¶¥∂§∏§À¿©∏Ê§π§Ÿ§≠§ §Œ§´§‚°£ §¡§Á§√§»§∑§„§¨§Û§¿ª—¿™§«6.6V§√§∆°¢7.2V•–•√•∆•Í°º§¿§»…·ƒÃ§ §Œ§´§ °ƒ §¢§Îƒ¯≈ŸÕ∑§Û§¿§¢§»§«•–•√•∆•Í°ººË§ÍΩ–§∑§ø§È°¢§“§∂§Œ•µ°º•Ð§Ë§Í«Æ§´§√§ø§Œ§«°¢≤π≈Ÿ§¨æ§¨§√§ø§ª§§§«Ω–Œœ§¨ÕÓ§¡§∆§§§ø§Œ§´§‚°£ ∫£§Œæı¬÷§¿§»≤‘∆ت˛¥÷£≥ ¨§Ø§È§§°ƒ§´§ °£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/12 X-69 | |
|
°˙ 1:50
ÀË∆¸§≥§ƒ§≥§ƒ (œ¢¬≥ ‚π‘¿Æ∏˘)
10∆¸§Œ∆¸µ≠°÷ÀË∆¸§≥§ƒ§≥§ƒ°ƒ°◊§« § §º§´•‚°º•∑•Á•Û§¨≈”√ʧ«§ƒ§√§´§´§Î§Ë§¶§À§ §√§∆§§§∆°¢§≥§Ï§‚∏∂∞¯…‘ÿ§»ΩÒ§§§∆§§§ø§±§…∏∂∞¯§¨»Ωÿ§∑§Þ§∑§ø°£(¬ø ¨) PIC¬¶§´§È§Œ∆±¥¸•·•√•ª°º•∏§ÀπÁ§Ô§ª§∆•‚°º•∑•Á•Û•«°º•ø§Ú¡˜øƧ∑§ §≠§„§ §Œ§À°¢¡˜øƃæ¡∞§ÀA/D∆˛Œœ§ÚΩËÕ˝§∑§∆§§§Þ§∑§ø°£ §≥§≥§«•´°º•Õ•Î§À¿©∏ʧ¨Ã·§√§∆§∑§Þ§√§∆•«°º•ø¡˜øƧŒ∆±¥¸§¨§∫§Ï§∆§§§ø§Ë§¶§«§π°£ (•´°º•Õ•Î§´§È÷§Î•ø•§•þ•Û•∞§¨…‘ƒÍ§ §Œ§«∫∆∏Ω¿≠§¨§ §´§√§ø°ƒ§Œ§¿§»ª◊§¶) A/D∆˛Œœ§ŒΩËÕ˝§Ú çŒæÏΩͧÀƒ…§§§‰§√§ø§È§ƒ§√§´§´§Í§¨Ãµ§Ø§ §Í§Þ§∑§ø°£ §«°¢§¡§„§Û§» ‚§±§Î§Ë§¶§À§ §√§ø§Œ§«∆∞≤˧ڪ£±∆°£ •¥°º•Ï•ý§Ø§Ûµ◊§∑§÷§Í§Œœ¢¬≥ ‚π‘ (MPEG1,500Kbps,20…√,1.85Mbyte) 10…√§«10 ‚°ƒ§´§ °©°© º¬§œ°¢•‚°º•∑•Á•Û∫∆¿∏§Œ≈‘πÁ§«0.5…√§Ø§È§§µŸ§Û§«§Þ§π°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/10 X-71 | |
|
°˙ 13:11
KHR-1 •ª•´•Û•…•¢•À•–°º•µ•Í°º °ı ≈Ï¿æ•Ì•Ð•√•»¬Á¿Ô
∫£∆¸§»Ã¿∆¸°¢¿ı¡§Œ•Ì•√•Ø•π£≥§«§‰§√§∆§Î§È§∑§§§«§π°£ KHR-1§œ§…§¶§«§‚§§§§(§©§£!)§±§…°¢≈Ï¿æ•Ì•Ð•√•»¬Á¿Ô§œ¥—§ø§´§√§ø§´§ °ƒ •¢•Þ•∆•È•π§¡§„§Û§‚•Ù•°•Î•≠•Â•Í•¢§¡§„§Û§‚Õ˧Χ∑°ƒ (§…§¡§È§´§»§§§¶§»¿æ∑≥±˛±Á) §«§‚°¢Ã¿∆¸§œÕß√£§» ıƒÕ≤Œ∑ý(√Ë¡» œ¬±˚§Ë§¶§´°¢≤÷¡§Þ§Í •µ•Ë• •È∏¯±È)§Ú¥—§Àπ‘§Ø§Œ§«§∑§ø°£ §þ§Û§ ¥Ëƒ•§Ï§√°™ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 1:12
§Þ°¢§Þ§ø•Õ•∏§¨¥À§Û§«§ø§¿§±°ƒ
‚§±§ §Ø§ §√§ø§»ΩÒ§≠§Þ§∑§ø§¨°ƒ •µ°º•Ð§Ú∞ϧƒ∞ϧƒƒ¥§Ÿ§∆§þ§ø§È∫∏¬≠ºÛ•Ì°º•Îº¥§Œ•Õ•∏§¨¥À§Û§«§Þ§∑§ø°£ ƒ˘§·ƒæ§∑§ø§È§¡§„§Û§»∆∞§≠§Þ§∑§ø°£ Œ…§´§√§ø°ƒ §™√ΧÀ§œ§¡§„§Û§» ‚§±§Î§Ë§¶§À§∑§∆ª£±∆§∑§ø§§§ °£ ∏™§Œ•µ°º•Ð§‚∏Ú¥π§∑§∆§¢§≤§Ë§¶°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:56
ÀË∆¸§≥§ƒ§≥§ƒ°ƒ
…˜ºŸ§“§§§∆≈ð§Ï§∆§ø§Œ§«∞Ï∆¸»Ù§”§Þ§∑§ø°£ §«°¢∞Ï∫Ú∆¸¿Æ∏˘§∑§øœ¢¬≥ ‚π‘§Úª£±∆§∑§Ë§¶§»ª◊§√§ø§Œ§«§π§¨°ƒ ª£±∆Ω–Õ˧΃¯§À§œ∞¬ƒÍ§∑§∆§§§Þ§ª§Û§«§∑§ø°ƒ orz §‚§∑§´§∑§ø§È»Ë§Ï§∆Ã¥§Ú∏´§∆§§§ø§Œ§´§‚°ƒ §¢§»°¢§ §º§´•‚°º•∑•Á•Û§¨≈”√ʧ«§ƒ§√§´§´§Î§Ë§¶§À§ §√§∆§§§∆°¢§≥§Ï§‚∏∂∞¯…‘ÿ°£ (Œæ¬≠ºÛ•‘•√•¡º¥§Œ•µ°º•Ð§¨§™§´§∑§§µ§§‚§∑§Þ§π§¨) §µ§È§À°¢Œæ∏™•Ì°º•Îº¥§Œ•µ°º•Ð(Futaba S3003)§¨§ƒ§§§À≤ı§Ï§Þ§∑§ø°£ ‚§±§Î§Ë§¶§À§ §√§ø§È•µ°º•Ð§Œ∏Œæ„§¨¡˝§®§Î§¿§Ì§¶§»§œª◊§√§∆§§§ø§±§…°¢§¡§Á§√§»»·§∑§§°£ •¥°º•Ï•ý§Ø§Û∞ÌπʧŒª˛§´§È§ §Œ§«3«Ø∞ æ¥˃•§√§∆§Ø§Ï§ø•µ°º•Ð§«§∑§ø°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/08 X-73 | |
|
°˙ 13:22
ÀË∆¸§≥§ƒ§≥§ƒ (•∏•„•§•Ì•’•£°º•…•–•√•ØΩËÕ˝≤˛Œ…)
•∏•„•§•Ì•’•£°º•…•–•√•Ø§«§Œ»Øø∂§¨µ§§À§ §Î§Œ§«°¢¿ËøÕ§ÀΩ¨§√§∆•Ì°º•—•π•’•£•Î•ø§Úº¬¡ı°£ •∏•„•§•Ì§Œ√Õ§Ú§Ω§Œ§Þ§Þª»§Ô§∫§À°¢∫«∂·§Œ4≤Û ¨(80msec ¨)§Ú ø∂—§∑§ø√Õ§Úª»§¶§Ë§¶§ÀΩ§¿µ§∑§Þ§∑§ø°£ (20msec§À1≤ÛA/D∆˛Œœ§Ú∆…§Û§«§§§Þ§π) §≥§Ï§«»Øø∂§∑§À§Ø§Ø§ §√§ø§Œ§«°¢•’•£°º•…•–•√•Ø§Ú¬≠ºÛ(•≤•§•Û1)°¢∏‘¥ÿ¿·(•≤•§•Û1)°¢π¯(•≤•§•Û2)§´§È¬≠ºÛ(•≤•§•Û2)°¢∏‘¥ÿ¿·(•≤•§•Û2)§À —ππ°£ øøÃÎ√ʧÀªÓ§∑§ø§»§≠§œƒÃæÔª—¿™§«§Œœ¢¬≥ ‚𑧨§«§≠§Î§Ë§¶§À§ §Í§Þ§∑§ø°£ (∫£ÃÎ∫∆∏Ω§«§≠§Î§´§…§¶§´º´øƧ¨§ §§°ƒ) --- C§«§Œ«€ŒÛ¿Î∏¿§»•¢•Ø•ª•π§Ú array[x,y] §»ΩÒ§§§∆§§§∆§¶§Þ§Ø∆∞§´§ §Ø§∆1ª˛¥÷§Ø§È§§«∫§Û§¿§Œ§œ»Îé (¿µ§∑§Ø§œ array[x][y]) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/07 X-74 | |
|
°˙ 2:42
∫«∂·§Œ•¥°º•Ï•ý§Ø§Û
≤ø§»§´ ‚§±§Î§Ë§¶§À§ §√§ø§Œ§«µ◊§∑§÷§Í§À∆∞≤˪£±∆°£ ¡Í —§Ô§È§∫∞Ï ‚§∫§ƒµŸ§Û§«§§§Î§±§…°¢•Ì•Ð•’•°•§•»£≥§Œ§»§≠§Ë§Í§œ•Þ•∑§´§ °ƒ ∑⁄§Ø§“§∂§Ú∂ §≤§ø ‚π‘ (MPEG1,800Kbps,30…√,3.7Mbyte) §∑§„§¨§þ ‚π‘ (MPEG1,800Kbps,28…√,3.5Mbyte) ¡∞∏ ˝∏˛§œ≈ðŒ©ø∂ª“•∑•þ•Â•Ï°º•∑•Á•Û§Ú∏µ§À°¢∫∏±¶ ˝∏˛§œªÓπ‘∫¯∏̧«∏´§ƒ§±§ø•‚°º•∑•Á•Û§«§π°£ §…§≥§´•–•È•Û•π§¨∞≠§§§Ë§¶§«±¶¬≠æ§≤§¨ —°£ º¬∫ð§À§œ§Ω§Ï§æ§Ï£≥≤Ûª£±∆§∑§∆§§§Þ§π°£(£≥≤Û§À£≤≤Û§œ≈æ§÷°ƒ) §≥§Û§ §Û§«¬≠Œ¢¬–≥—110mm§À§∑§∆ ‚§±§Î§Œ§´§ °ƒ --- ª≤πÕ°ß °÷•Ì•Ð•’•°•§•»£≥°◊§Œ§»§≠§Œ§∑§„§¨§þ ‚π‘ (MPEG1,500Kbps,7…√,800Kbyte,ª£±∆°ß•§•´•Ì•π§µ§Û) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/06 X-75 | |
|
°˙ 2:00
§¢§Ï°©ƒæ§√§ø°ƒ
§ý°º°ƒ§…§≥§¨∞≠§§§Û§¿§Ì§¶ ¿Ðø®…‘Œ…§´§ §°°ƒ π¯•‘•√•¡§Œ•¢•Î•þ•€°º•Û§œ•ª•Ï°º•∑•Á•Û§¨∫ԧϧ∆•¨•ø§¨¡˝§®§∆§Î§þ§ø§§°£ §‰§√§—§Í§≥§≥§œº˘ªÈ§À§∑§∆ª»§§ºŒ§∆§À§π§Ÿ§≠§ §Œ§´§ °ƒ (§Ω§Ï§œ§Ω§Ï§«§‚§√§ø§§§ §§) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 1:39
§¶§√°ƒ§Þ§ø°©°©
§¶§Þ§Ø ‚§±§ §§∏∂∞¯§œ±¶¬≠ºÛ•Ì°º•Îº¥§Œ∏∂≈¿•∫•Ï§»»Ωÿ°£ (•Ì•Ð•’•°•§•»£≥§Œª˛°¢§π§«§À§∫§Ï§∆§ø§´§‚°ƒ) °÷ƒæ§√§ø§´§ °©°©°©°◊°ƒ§»ª◊§√§∆§ø§È°ƒ ƒ¥ª“§À§Œ§√§∆∆∞§´§∑§∆§§§Î§¶§¡§À°¢§Þ§øπ¯•‘•√•¡º¥•µ°º•Ð(∫£§œ2350)§¨§…§¶§´§ §√§øÃœÕÕ°£ •‘•√•¡º¥•µ°º•Ð§Ú∆∞§´§Ω§¶§»§∑§øΩ÷¥÷§ÀPIC§¨ÕÓ§¡§¡§„§¶°ƒ §¢§È§È°ƒ •µ°º•Ð√±¬Œ§«•∆•π•»§«§≠§Î¥ƒ∂≠§‚∫ӧȧ §≠§„°ƒ --- Œ…§Ø∏´§ø§È«ÿ√ʧŒCPU•Ð°º•…•€•Î•¿°º§‚§∞§Û§À§„§Í∂ §¨§√§∆§Þ§∑§ø°£ Ω≈§§ª“§œ¬Á —§«§π°£ §¢°¢§«§‚ çÀ•≠•√•»«„§™§¶§ §Û§∆ª◊§Ô§ §§§«§π§Ë°£ •Ì•Ð•√•»§Ú∆∞§´§∑§∆Õ∑§÷§Ë§Í§‚§‰§Í§ø§§§≥§»§¨§¢§Î§Û§«§π°£ (°ƒ§»∂ا¨§Í∏¿§√§∆§þ§Î) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/05 X-76 | |
|
°˙ 20:51
X-Day•Í•ª•√•»
µ◊§∑§÷§Í§À X-Day•Í•ª•√•» ÃÐ…∏§œ8/20 ¬Ë£≥≤ÛRoboCountryIV §¡§Á§√§»ƒπ§π§Æ§Î§´§ °ƒ §≥§Œ∆¸§Þ§«§À
°÷ÀË∆¸§≥§ƒ§≥§ƒ°◊§´°÷ÀËΩµÀˆ§¥§ƒ§¥§ƒ°◊§Œ§…§¡§È§´§¨¿Æ§ÍŒ©§ø§ §§§»∆Ò§∑§Ω§¶°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/02 | |
|
°˙ 22:50
(URL•·•‚) Linux §Œ•∑•Í•¢•Î•«•–•§•π•…•È•§•–§Œ§≥§»
§Ω§Ì§Ω§ÌÀÐ≥ ≈™§À∫Ó∂»§∑§ §§§»°ƒ§»ª◊§√§∆§§§Î≤£§´§È∞≠À‚§¨§µ§µ§‰§Ø°£ ∞≠°ß°÷§¶§µ§Æƒ∑§”°◊§π§Î§Œ§ÀICS§Œ•ð•∏•∑•Á•Û•≠•„•◊•¡•„§ƒ§´§¶§Û§∏§„§ §§°© ª‰°ß§Û°¢§Ω§Ï§œ§Þ§¿§Ô§´§Û§ §§§∑°ƒ ∞≠°ß§«§‚§…§¶§ªPIC¬¶§Œ•◊•Ì•∞•È•ý∫ӧͧ §™§π§«§∑§Á°© ª‰°ß§Ω°¢§Ω§Í§„§¢•·•§•ÛCPU§ÚArmadillo§À —§®§Î§´§ÈPIC¬¶§ÀA/D —¥πΩËÕ˝§»∑Î≤çڕ·•§•Û§À≈桘§π§ÎΩËÕ˝ƒ…≤√§π§Î§±§…°ƒ ∞≠°ß§∏§„§¢§ƒ§§§«§À•ð•∏•∑•Á•Û•≠•„•◊•¡•„µ°«Ω§‚º¬¡ı§∑§¡§„§§§ §Ë ª‰°ß§Ω§Û§ §Œ∫Чª§ø§È•·•§•ÛCPU§À¡˜§Î•«°º•øŒÃ¡˝§®§¡§„§¶§∏§„§Û°£ºıøÆΩËÕ˝ƒ…§§…’§´§ §Ø§ §√§¡§„§¶°£ ∞≠°ß§∏§„§¢•·•§•ÛCPU¬¶§ŒºıøÆΩËÕ˝§Ú•Ê°º•∂•◊•Ì•ª•π§∏§„§ §Ø§∆•«•–•§•π•…•È•§•–§ÀΩÒ§±§–§§§§§Û§∏§„§ §§°©°© ª‰°ß§¡§Á°¢§¡§Á§√§»¬‘§√§∆°£•«•–•§•π•…•È•§•–∫Ó§Î√Œº±§ §Û§∆§ §§§√§∆§–°™§¢§ §ø§Þ§øª‰§Ú¥˛∏¢§µ§ª§ø§§§Û§«§∑§Á§√°™°™ §»∏¿§§§ƒ§ƒ Google §«§¡§Á§≥§¡§Á§≥∏°∫˜§∑§∆§þ§ø§È°ƒ linux-users ML§«§Œ•∑•Í•¢•Î•«•–•§•π•…•È•§•– (serial.c) §Œ≤˛¬§§À§ƒ§§§∆§Œµƒœ¿§¨∞˙§√§´§´§Í§Þ§∑§ø°£ [linux-users:96629] •∑•Í•¢•ÎƒÃøÆ√ʧŒRTS√ºª“§Œ¿©∏Ê [linux-users:96720] Re: •∑•Í•¢•ÎƒÃøÆ√ʧŒRTS√ºª“§Œ¿©∏Ê °ƒ§¢§Ï°©§…§≥§´§«∏´§ø§Ë§¶§ Ãæ¡∞§¨°ƒ §≥§Œµƒœ¿§»§œ¡¥¡≥∞„§¶§Œ§¿§±§…°¢ºıøÆ•«°º•ø§Ú•Ê°º•∂•◊•Ì•ª•π§«ΩËÕ˝§µ§ª§Î§Œ§«§œ§ §Ø§∆°¢•«•–•§•π•…•È•§•–¬¶§«ΩËÕ˝§∑§∆ ÷ªˆ§‚ ÷§∑§¡§„§®§ø§È§§§§§ §°°ƒ§» (ºıøÆ•«°º•ø§Œ∞Ϻ°≤√π©§Ú•«•–•§•π•…•È•§•–§À§µ§ª§∆°¢•Ê°º•∂•◊•Ì•ª•π§œ∫«ø∑§Œ∞Ϻ°≤√π©•«°º•ø§¿§±§Ú∆…§ý§Ë§¶§À) °ƒ§¢§Ï°©§…§≥§´§«∏´§ø§Ë§¶§ Ãæ¡∞§¨°ƒ --- ∫£≤Û§œ•«•–•§•π•…•È•§•–∫Ó§√§∆§Î§Ë§¶§ ÕæÕµ§¢§Í§Þ§ª§Û°£ (§Ω§Ï∞ ¡∞§À∫Ó§Í ˝§Ú≥–§®§ÎÕæÕµ§¨§ §§) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/06/01 | |
|
°˙ 18:38
°÷øÂõ∑Ó°◊ §‚§¶»æ ¨§¡§´§Ø≤·§Æ§ø§Õ§ß°ƒ
§«°¢∑Ó§ŒΩȧ·§´§È…˜ºŸ§«ª≈ªˆµŸ§Û§∏§„§√§ø§Í§∑§∆§Î§Ô§±§«§π§¨°ƒ ∫£∑Ó§œ§‚§¶§¡§Á§√§»¬Œƒ¥Œ…§Ø§ §Î§»§§§§§ §°°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |



| 2006/05/31 | |
|
°˙ 23:19
ÀË∆¸§≥§ƒ§≥§ƒ°ƒ§«§≠§∆§ §§
∫Ú»’§œ∫Ó∂»§∑§ø§±§…§Õ°ƒ (∆¸µ≠ΩÒ§Ø≤À§ §´§√§ø) ∆¸ÕÀ∆¸§´§È§∫§√§»π¢§Œƒ¥ª“§¨ —§¿§√§ø§Œ§¿§±§…°¢∫Ú∆¸§´§È§´§ §Íº§Ï§∆§≠§∆∆¨§‚§Ð°º§√§»§∑§ø¥∂§∏°£ •´•È•™•±§«π¢ƒÀ§·§ø§Œ§´§»ª◊§√§∆§ø§±§……˜ºŸ§“§§§∆§Î§þ§ø§§°£(±´§Œ√Ê ‚§§§ø§∑) §»§§§¶§≥§»§«∫£∆¸§œø ƒΩ§ §∑°£ ø∆¸§À°÷ÀË∆¸§≥§ƒ§≥§ƒ°◊§π§Î§¿§±§∏§„§ §Ø§∆µŸ∆¸§À¥Ëƒ•§È§ §≠§„•¿•·§´§‚°ƒ (∆√§Àª‰§ŒæÏπÁ) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/30 | |
|
°˙ 13:44
(•·•‚) °÷§¶§µ§Æƒ∑§”°◊§À§ƒ§§§∆
°÷°◊…’§≠§ §Œ§œƒÞ¿Ë§Àº´Õ≥≈Ÿ§¨§ §§•Ì•Ð•√•»§«§œ§¡§„§Û§»§∑§ø§¶§µ§Æƒ∑§”§À§ §È§ §§§´§È°£ (≈∆§∏§„§ §§§Û§¿§´§È°÷§¡§„§Û§»§∑§ø°◊§√§∆§Œ§œ§Ω§‚§Ω§‚ÃµÕ˝) …·ƒÃ§À§∑§„§¨§Û§¿æı¬÷§¿§»°¢§“§∂§Œ•µ°º•Ð§¿§±§∏§„ƒ∑§Ÿ§ §§§¿§Ì§¶§ §°°ƒ §Ω§‚§Ω§‚ƒ∑§÷§¿§±§Œ≤√¬Æ∆¿§È§Ï§Î§Œ§´§ ° ¡∞≤Û§Œ•´•Û•’•°•Ï•Û•π§«∏˜ª“Œœ∏¶∂ÂΩͧŒ≤Ú¿‚§¨§¢§√§ø§Ë§¶§ °ƒ) ∫£°¢πÕ§®§∆§Î§Œ§œ§≥§Û§ ¥∂§∏°£
ɬͧœ°ƒ °÷æ»æø»§¿§±§Ú≤√¬Æ§∑§∆§§§Î§»§≠§À•∏•„•§•Ì ‰¿µ§Ú§…§¶§π§Î§´°◊ §´§ §°°ƒ §‰§√§—§Í•∏•„•§•Ì§œπ¯§À∞Ð∆∞§∑§ §≠§„§¿§Ì§¶§´°£ KHR-1§Œ§¶§µ§Æƒ∑§”§œ•Ð•«•£§Œ∑⁄§µ§»¬≠Œ¢§Œ¬Á§≠§µ§ÀΩı§±§È§Ï§∆§§§ø§Œ§´§‚°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 3:11
ÀË∆¸§≥§ƒ§≥§ƒ (§∑§„§¨§þ ‚π‘•‚°º•∑•Á•Û§Œ•–•∞»Ø∏´)
≈⁄ÕÀ∆¸§Œ∆¸µ≠(∫Ó∂»•·•‚)§ÀΩÒ§§§ø°÷∆Û ‚ÃÐ∞ πþ§Œ∆∞∫Ó§¨∫∏±¶§«∞„§√§∆§Î§þ§ø§§°◊§Œ∏∂∞¯»Ø∏´°£ ±¶¬≠¬¶§Œ•‚°º•∑•Á•Û§Ú¿∏¿Æ§π§Î§»§≠°¢µ’±ø∆∞≥ÿ§Œ∑◊ªª∑Î≤稕µ°º•Ð§Œ≤‘∆Ø»œ∞œ±€§®§∆§Þ§∑§ø°£ w_060505-2.2.ru.pos ¢™ w_060505-2.2.ru.dat °ƒ§√§∆°¢§ §Û§«±¶¬¶§¿§±°ƒ §«§‚°¢§≥§Œ ‚π‘§œ§“§∂§¨90≈Ÿ∞ æÂ∂ §¨§√§∆§Î§´§Èª»§Ô§ §§§´§ °ƒ §¢§Ï°©•—•Û•¡§ÚΩ–§π§»§≠§À∞Ï ‚∆ߧþΩ–§πæÏπÁ§‚§“§∂§¨90≈Ÿ∞ æÂ∂ §¨§√§∆§¡§„§¿§·§ §Œ§´§ °©°©°© «ÿ§¨ƒ„§§•Ì•Ð§Ú¡ÍºÍ§À§π§Î§»§≠§œ°¢∆ߧþπ˛§Þ§∫§À§∑§„§¨§Û§«•—•Û•¡§π§Î§∑§´§ §§°©°© (§Ω§Û§ §≥§»§««∫§ý§Œ§œ§Þ§¿¡·§§§√§∆°ƒ) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/29 | |
|
°˙ 23:56
¬Ë10≤ەϕƕ•ϰº•∑•Á•Û°ƒ 40%°þ18%°ƒ orz
∏¯º∞•⁄°º•∏§«∂•µªµ¨¬ß§¨∏¯≥´§µ§Ï§Þ§∑§ø°£ µ¨ƒ¯±Èµª§Œ°÷§¶§µ§Æƒ∑§”°◊§œ§Þ§¢§§§§§»§∑§∆°ƒ(§Ω§¶§´°©)°¢°÷10…√¥÷§À10 ‚°◊§‚§Þ§¢§ §Û§»§´§π§Î§»§∑§∆°ƒ(§€§Û§»§À°©) •¥°º•Ï•ý§Ø§Û§À§»§√§∆§œ°÷¬≠Œ¢∫«¬Áƒπ110mm°◊§¨∞Ï»÷§Œ≤ð¬Í°£ πΩ¡€√ʧŒø∑§∑§§µ”§«§‚°¢µ”ƒπ 251mm § §Û§«§π§±§…°ƒ ¬≠Œ¢§Œ≥—§ÚÕÓ§»§µ§ §§§»§π§Î§» 100mm°þ45mm §Ø§È§§§« 40%°þ18% §√§∆§§§¶¡«≈®§ »ÊŒ®§À§ §Î§Û§«§π§±§…°º°º°º (µ„ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/27 | |
|
°˙ 2:19
(URL•·•‚) °÷•¡•Á•Ì•·•∆°◊≥´»Ø≥µÕ◊
Jin§µ§Û§Œ∆¸µ≠ ∑–Õ≥ •º•Õ•È•Î•Ì•Ð•∆•£•Ø•π§À°÷•¡•Á•Ì•·•∆°◊≥´»Ø≥µÕ◊ §¨Ω–§∆§Þ§π°£ ÕΩƒÍ»Œ«‰ª˛¥¸°ß 2006«Ø9∑Ó §√§∆§≥§»§œ°¢ROBO-ONE 10th §À•Ô°º•Ø•πª≤≤√§´§ °© [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 2:07
(∫Ó∂»•·•‚) ÀË∆¸§≥§ƒ§≥§ƒ°© (•‚°º•∑•Á•Û§«§≠§∆§ §§°º)
∫£§¥§Ì§œµØ§≠槨§Í•‚°º•∑•Á•Û§Ú∫Ó§√§∆§§§Î§œ§∫§¿§√§ø§Œ§À°¢º¬∫ð§À§‰§√§∆§§§Î§Œ§œ ‚π‘•‚°º•∑•Á•Û°ƒ orz §«§‚§Ω§Ì§Ω§Ìø≤§ §§§»ƒ´µØ§≠§È§Ï§ §§§∑°ƒ (°÷∫£∆¸§‚…ȧ±°¶DE°¶§π§´§È°¡≤ª∆¨°◊æı¬÷) (∫Ó∂»•·•‚) basename: w_060505 §ŒT2ª—¿™§À§™§§§∆ ∆Û ‚ÃÐ∞ πþ§Œ±¶¬≠æ§≤(RU2_T2: -2.2.ru.dat) ∆Û ‚ÃÐ∞ πþ§Œ∫∏¬≠æ§≤(LU2_T2: -2.2.lu.dat) §Œ•‚°º•∑•Á•Û•«°º•ø§¨∞„§√§∆§§§Î§Ë§¶§ µ§§¨§π§Î°£ RU2_T2§«§Œ¬≠Œ¢•Ì°º•Î ˝∏˛§Œ≥—≈Ÿ§¨§™§´§∑§§°£ (√œÃç»ø ø§À§ §√§∆§§§ §§) Õ◊•¡•ß•√•Ø [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/26 | |
|
°˙ 20:18
(NEWS•·•‚) æÆ∑ø•“•Â°º•Þ•Œ•§•…•Ì•Ð•√•»°÷•¡•Á•Ì•·•∆°◊
Jin§µ§Û§Œ≥´»Ø∆¸ªÔ∑–Õ≥ ª∫¡Ì∏¶§ŒµªΩ—∞Ð≈æ§À§Ë§ÍæÆ∑ø•“•Â°º•Þ•Œ•§•…•Ì•Ð•√•»§Ú≥´»Ø °°•¡•Á•Ì•·•∆§œ°¢π‚§µ35cm°§Ω≈ŒÃ1.5kg§«°¢20º´Õ≥≈Ÿ§ÚÕ≠§∑§∆§§§Þ§π°£¬≠…Ù§À£≥º¥Œœ•ª•Û•µ°¢∆π¬Œ…Ù§À≤√¬Æ≈Ÿ•ª•Û•µ°¶•∏•„•§•Ì°§•≥•Û•»•Ì°º•È§»§∑§∆§œª∫¡Ì∏¶§«≥´»Ø§∑§øº¬ª˛¥÷Linux° ARTLinux°À§¨≤‘∆∞§π§ÎæÆ∑øæ ≈≈Œœ•≥•Û•»•Ì°º•È§Ú≈Î∫Ч∑§∆§§§Þ§π°£§Þ§ø°¢∆±ÕÕ§Àª∫¡Ì∏¶§«≥´»Ø§∑§ø•“•Â°º•Þ•Œ•§•…•Ì•Ð•√•»¥»◊•Ω•’•»•¶•ß•¢§¨§≥§Œæ§«≤‘∆∞§∑§Þ§π°£ •’•ø•–§Œ≥´»Øµ°°¢µ˛æ¶§Œ•Þ•Œ•§°¢∂·∆£§Œø∑∑øKHR°¢√ʬº«ÓªŒ§Œø∑∑ø°ƒ ª‰§¨Õþ§∑§§§‚§Œ§œ≤ø§ §Œ§´§ÚπÕ§®ƒæ§µ§ §Ø§∆§œ§§§±§ §§§´§‚°£ --- °÷•¡•Á•Ì•·•∆°◊§√§∆°¢•ø•´•È≈™§À§œÃ‰¬Í§ §§§Œ°© --- 2006.05.26 23:00 ƒ…µ≠ ¥Ó§Û§«•ø•Ï•≥•þ§∑§ø§Û§¿§±§…√Êø»§œ•€•”°º•Ì•Ð•√•»§ §Œ§Õ°ƒ§¡§Á§√§»ªƒ«∞°£ ¬Á∆¸Àеª∏¶§Œ∆¸µ≠ §À °÷¿Ω∫Ó√¥≈ˆ§œJin§µ§Û°£•Ÿ°º•π§œPirkus°¶R°°Type-01°◊ §»§§§¶æ Û§¨Ω–§∆§Þ§∑§ø°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:10
∫Ú∆¸§Œ§™«„ ™ (USB•–•π•—•Ô°º•π•§•√•¡•Û•∞•œ•÷°¢ƒ∂§¶§π∂À∫ŸLAN•±°º•÷•Î)
≤Òº“µ¢§Í§À•Ë•…•–•∑§ÿ «„§√§ø§Œ§œ
§≥§Œ•œ•÷§œ coLinux §Œ§ø§·§¿§±§Àπÿ∆˛°£ Win2K§«coLinux§Úª»§¶æÏπÁ°¢IP•¢•…•Ï•π§Ú 192.168.0.1 §À§∑§ø§Ø§ §´§√§ø§È WinPCap §«•÷•Í•√•∏¿Ð¬≥§π§Î§∑§´§¢§Í§Þ§ª§Û°£ §¨°¢Windows§ŒTCP/IP•·•«•£•¢∏°Ω–µ°«Ω(LAN•±°º•÷•Î§Ú»¥§§§ø§»§≠§À°÷•Õ•√•»•Ô°º•Ø§¨¿Ð¬≥§µ§Ï§∆§§§Þ§ª§Û°◊§»Ω–§∑§∆§Ø§Ï§Î§™¿·≤§ •¢•Ï)§«•«•–•§•π§¨Ãµ∏˙§À§ §Î§»°¢WinPCap∑–Õ≥§Œ•Ì°º•´•Î•¢•Ø•ª•π§Þ§«Ãµ∏˙§À§µ§Ï§∆§∑§Þ§¶§»§§§¶Ã‰¬Í§¨°ƒ §¡§ §þ§À°¢TCP/IP•·•«•£•¢∏°Ω–µ°«Ω§Úõ∏˙§À§∑§∆§‚•¿•·§«§∑§ø°£ ª≈ ˝§¨§ §§§Œ§«°¢æÆ∑ø§Œ•œ•÷§Ú∑“§Æ§√§—§ §∑§À§π§Î§≥§»§«¬–±˛§∑§Ë§¶§´§»°£ (°÷WinXP«„§®§–§°°©°©°◊§»§§§¶œ√§‚°ƒ) --- §≥§Ï§«≈⁄ÕÀ∆¸§ŒªŸ≈Ÿ§œOK°ƒ§´§ °ƒ§√§∆°¢•‚°º•∑•Á•Û∫Ó§√§∆§§§ §§ DE §π§´§È°¡°™ (∆√§ÀµØ§≠槨§Í) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/25 | |
|
°˙ 1:20
ÀË∆¸§≥§ƒ§≥§ƒ (MSP:Motion Script Player≤˛Œ…√Ê)
§»§Í§¢§®§∫ Step1) •‚°º•∑•Á•Û•«°º•ø§ÚFIFO§À≈Í∆˛ ¢™°÷•‚°º•∑•Á•Û•«°º•ø∆…§þπ˛§þ≥´ªœ°◊ Step2) º¬π‘•≥•Þ•Û•…§ÚFIFO§À≈Í∆˛ ¢™°÷•‚°º•∑•Á•Û•«°º•ø∆…§þπ˛§þΩ™Œª¬‘§¡°◊ ¢™°÷•«°º•ø∫∆¿∏≥´ªœ°◊ §»§§§¶∆∞∫Ó§¨§«§≠§Î§Ë§¶§À§ §√§ø§Œ§«°¢MSP§Œ≤˛Œ…§œ∞Ϫ˛√Ê√«°£ §Þ§¿°¢•‚°º•∑•Á•Û•π•Ø•Í•◊•»§«§œ§ §Ø•‚°º•∑•Á•Û•«°º•ø§ §»§≥§Ì§¨•ÿ•ø•Ï§«§π°£ ÿ∆¸°¢Ã¿∏Â∆¸§œ•‚°º•∑•Á•Û∫Ó¿Æ°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/24 | |
|
°˙ 23:11
∫£∆¸§Œ§™«„ ™ (•Ë•≥•œ•Þ«„§§Ω–§∑µ™π‘14°¢DVD°¢•µ•¶•Û•…•»•È•√•Ø)
•Í•Û•Ø¿Ë§œ•¢•Þ•æ•Û
(•¢•Ω•∑•®•§•»•Í•Û•Ø)     ≈⁄∫Ωπþ§Í§Œ√Ê°¢≤Òº“µ¢§Í§ÀÀÐ≤∞§µ§Û§ÿ «„§√§ø§Œ§œ §Ω§∑§∆°¢¥∞∑ε≠«∞§ÀDVD§»•µ•¶•Û•…•»•È•√•Ø§Ú§Þ§»§·«„§§°˜•¢•Þ•æ•Û
§’§Ô§’§Ô§«§∆§Ì§∆§Ì§ ¿§≥¶§Ú§¢§Í§¨§»§¶°£ (æµ≠¡¥§∆•¢•Þ•æ•Û•¢•Ω•∑•®•§•»•Í•Û•Ø) --- ª≤πÕ°ß ≤ª≥⁄§œSonyMusic§Œ•Ë•≥•œ•Þ«„§§Ω–§∑µ™π‘∏¯º∞HP§« π§Ø§≥§»§¨§«§≠§Þ§π°£ °÷•Ë•≥•œ•Þ«„§§Ω–§∑µ™π‘°◊ (Wikipedia) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 2:33
Tech•´•Û•’•°•Ï•Û•πøΩ§∑π˛§þ
§…§¶§∑§Ë§¶§´Ã¬§√§∆§§§ø§È°¢…˜ºŸ§«ø≤π˛§Û§«§Î§¶§¡§À°∫¿⁄§À§ §√§∆§§§ø§Œ§«§π§¨°ƒ ƒ…≤√ ÁΩ∏§∑§∆§§§ø§Œ§«øΩ§∑π˛§þ°£ ±“¿±§À§ƒ§§§∆§Œ≤Ú¿‚§œÃÓ≈ƒª Œ·§¨§§§È§√§∑§„§Î§´§»ª◊§√§∆§§§ø§Œ§¿§±§…°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 2:26
ÀË∆¸§≥§ƒ§≥§ƒ (•≥•Þ•Û•…ΩËÕ˝§Œ ¨Œ•)
•≥•Þ•Û•…ΩËÕ˝§ÚMSP¡¥¬Œ§Œ¿©∏Ê•≥•Þ•Û•…°¢•‚°º•∑•Á•Û•«°º•ø•’•°•§•ÎªÿƒÍ°¶º¬π‘°¶ƒ‰ªþ•≥•Þ•Û•…°¢•‚°º•∑•Á•Û•«°º•ø•’•°•§•Î∆…§þπ˛§þ°¶∫∆¿∏§Œª∞¡ÿ§À ¨Œ•°£ §Ω§Ï§æ§ÏæÂ∞춧¨≤º∞çŒΩËÕ˝§À≥‰§Íπ˛§·§Î§»§≥§Ì§Þ§«≥Œ«ß°£ ÿ∆¸§≥§Ω§œ•‚°º•∑•Á•Û•«°º•ø•’•°•§•Î§Œ¿⁄§Í¬ÿ§®ΩËÕ˝§Ú°ƒ --- MSP§Œº¬¡ı§œ§Ω§Ï§ §Í§Œ§»§≥§Ì§«√Ê√«§∑§∆•‚°º•∑•Á•Û∫ӧȧ §§§»¥÷§ÀπÁ§Ô§ §§ (¥¿ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/23 | |
|
°˙ 3:05
ÀË∆¸§≥§ƒ§≥§ƒ(∫Ó∂»∫∆≥´)
°÷ÀË∆¸§≥§ƒ§≥§ƒ°◊§Œ§œ§∫§ §Œ§À∞ÏΩµ¥÷§Œ•÷•È•Û•Ø°ƒ •‚°º•∑•Á•Û•«°º•ø∫∆¿∏•≥•Þ•Û•…§»°¢MSP§Ω§Œ§‚§Œ§Œ∆∞∫Ó§Ú¿©∏ʧπ§Î•≥•Þ•Û•…(ΩËÕ˝√Ê√«§»§´¡¥•µ°º•Ð•’•Í°º∂Ø¿©§»§´)§»§ŒÕ•¿ËɬͧÀ«∫§þ√Ê MSP¿©∏Ê•≥•Þ•Û•… °‰ •«°º•ø∫∆¿∏•≥•Þ•Û•… °‰ •‚°º•∑•Á•Û•«°º•ø∫∆¿∏ΩËÕ˝ §Œ§Ë§¶§À§Ô§±§∆°¢§‚§¶∞ϧƒFIFO§Ú∫Ó§√§ø ˝§¨¥ √±§Ω§¶°£ CONTROL, COMMAND, DATA §√§∆¥∂§∏§´§ °ƒ (∏Ω∫þ§œ CONTROL §» DATA §Œ∆Û§ƒ) ≈⁄ÕÀ∆¸§À¥÷§ÀπÁ§¶§Û§«§∑§Á§¶§´°ƒ (¥¿ (õ¿˛¡ý∫Ó§œ≈˛ƒÏ¥÷§ÀπÁ§Ô§ §§ÕΩ¥∂) --- •·•‚ msp.c §« control_read() > 0 §Œª˛§¿§± control_exec()§Ú∏∆§Û§«§§§Î§Œ§œ§™§´§∑§§°£ (FIFO§À•«°º•ø§¨Ãµ§Ø§∆§‚°¢control•≥•Þ•Û•…•–•√•’•°§À•≥•Þ•Û•…§¨•≠•Â°º•§•Û•∞§µ§Ï§∆§§§Î≤ƒ«Ω¿≠§¨§¢§Î) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/22 | |
|
°˙ 23:55
•◊•È•Ï•π£≥ªÕœ∫°¢•◊•È•Ï•π•È°º£÷£¡£Œ°¢¥—Õ—æØΩ˜(•◊•È•Û•ƒ°¶•…°º•Î)
•Í•Û•Ø¿Ë§œ•¢•Þ•æ•Û
(not •¢•Ω•∑•®•§•»)    ROBO-ONE•”•Î•¿°º§Œ•–•§•÷•Î°÷•◊•È•Ï•π£≥ªÕœ∫°◊ ø≤π˛§Û§«§Î¥÷§À•Ÿ•√•…§«∆…§þ§Þ§∑§ø°£ ∆…§þΩȧ·§Œ∫¢§œ≥® ¡§À§´§ §ÍƒÒπ≥§¨§¢§√§ø§±§…°¢£¥°¢£µ¥¨§Ø§È§§§´§È§π§Û§ §Í∆…§·§Î§Ë§¶§À°£ ∏»æ§À§ §Î§€§…¿˛§¨∫Ÿ§ØÂ∫ŒÔ§À§ §√§∆§§§Ø§Œ§œ•¢•∑•π•ø•Û•»§µ§Û§¨ —§Ô§√§ø§Œ§´§ °© ∞ÏΩÔ§Àº⁄§Í§ø°÷•◊•È•Ï•π•È°º£÷£¡£Œ°◊§Œ§€§¶§¨¿˛§¨Â∫ŒÔ§«∆…§þ§‰§π§´§√§ø§«§π°£ •∏•„•Û•◊§»§´ª—¿™¿©∏ʧÀ∞µΩÃ∂ıµ§§Úª»§√§∆§ø§Œ§Õ°£ º´Õ≥º´∫þ§À»Ù§”ƒ∑§Õ§∆§ÎÕ˝Õ≥§¨§Ô§´§Í§Þ§∑§ø°£ ∫£§ŒROBO-ONE•’•°•§•ø°º§¿§»Ω≈§ø§Ø§∆ÃµÕ˝°ƒ §Û°ºÃëڧ§§»§œª◊§¶§Û§«§π§¨°ƒ ∆…§Û§«§§§∆°÷§≥§Ï§√§∆°ÿ•Í•Û•∞§À§´§±§Ì°Ÿ°©°◊§»§´ª◊§√§∆§∑§Þ§√§øª‰°£ ≈®§Ú≈ð§π§ø§”§Àø∑§ø§ ≈®§¨°ƒ§»§´°¢°÷§´§´§√§ø§ «œºØ§·°◊§»§´§√§∆æثؕޕە¨§Œ≤¶∆ª§ §Û§«§∑§Á§¶§´°ƒ °÷£≥ªÕœ∫°◊§Œ∏°÷£÷£¡£Œ°◊§Ú∆…§Û§«°¢°÷£≥ªÕœ∫§‚§≥§Œ•®•‘•Ω°º•…§«¬≥§±§ø§´§√§ø§Œ§´§ §°°ƒ°◊§»ª◊§√§ø§Í°£ °÷£÷£¡£Œ°◊§¨£¥¥¨§«Ω™§Ô§√§¡§„§√§∆§Î§Œ§œ¬«§¡¿⁄§Í§ §Œ§´§∑§È°ƒ §¢§Ï§√§∆ª“∂°∏˛§±§»§§§¶§Ë§Í°÷£≥ªÕœ∫°◊§Ú∆…§Û§«∞ȧ√§ø¬Á§≠§ §™Õß√£∏˛§±§√§∆¥∂§∏°£ §¢°¢§§§®°¢ª‰§œ≥⁄§∑§·§Þ§∑§ø§Ë°º°£ °÷£≥ªÕœ∫°◊§»∞ÏΩÔ§À¬þ§∑§∆§§§ø§¿§±§ø§™§´§≤§«§π°£ --- §´§ §Í –∏˛§∑§∆§∑§Þ§√§ø§Œ§«°¢¥—Õ—æØΩ˜(•◊•È•Û•ƒ°¶•…°º•Î)§Ú∆…§Û§«•…°º•Î ¨§Ú ‰¿µ°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 23:30
∫Ú∆¸§Œ§™«„ ™ (•µ•Ø•È¬Á¿Ô°¢πð≥猕ϕƕ™•πII°¢SD°¢•»•Èµª)
•Í•Û•Ø¿Ë§œ•¢•Þ•æ•Û
(not •¢•Ω•∑•®•§•»)     •¢•Þ•æ•Û§À•Í•Û•Øƒ•§Î§ŒÃÃ≈ð§À§ §√§ø§Œ§«§≥§Œ§Þ§Þ°£ Ã⁄ÕÀ§ŒÃΧ´§Èø≤π˛§Û§«∆¸ÕÀ§Œ∏·∏§´§È§Ë§¶§‰§Ø∆∞§±§Î§Ë§¶§À°ƒ (•Ÿ•√•…§«•≥•þ•√•Ø∆…§Û§«§Þ§∑§ø§±§…) »˛Õ∆±°§«Ω’•‚°º•…§À§∑§ø∏°¢ÀÐ≤∞§µ§Û§ÿ «„§√§ø§Œ§œ
ÀÐ≤∞§«∏´§´§±§∆«„§§§Ω§¶§À§ §√§ø§‚§Œ
∞¶¬¢»«§œ•´•È°º•⁄°º•∏§¨§Ω§Œ§Þ§Þ∆˛§√§∆§Î§È§∑§§°£Õþ§∑§§§´§‚°ƒ --- 2006.05.23 19:45 ƒ…µ≠ °÷ª‰§Ú∑Ó§Þ§«°◊§œ¥∞¡¥»«°¢°÷§ §Û§∆¡«≈®§À°◊§œ∞¶¬¢»«§«§∑§ø°£(•Í•Û•Ø¿Ë§œ•¢•Þ•æ•Û) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/17 | |
|
°˙ 23:16
ÀË∆¸§≥§ƒ§≥§ƒ (•‚°º•∑•Á•Û∫∆¿∏•≥•Þ•Û•…ΩËÕ˝§Œº¬¡ı√Ê°ß§Ω§Œ£≤)
§≠§Á§¶§‚§¡§Á§√§»§¿§±∫Ó∂»°£ X (execute) §» S (stop) §Œ¥ ∞◊º¬¡ı§¨§«§≠§Þ§∑§ø°£ •‚°º•∑•Á•Û•«°º•ø•’•°•§•Î§œ§¢§È§´§∏§·∆…§þπ˛§Û§«§™§§§∆°¢¿©∏Ê•≥•Þ•Û•…FIFO§À "X" §Ú¡˜§Î§»º¬π‘°£"S" §Ú¡˜§Î§»•«°º•ø§ŒΩ™√º§Þ§«•∏•„•Û•◊°£ §Þ§¿ £øÙ§Œ•‚°º•∑•Á•Û•«°º•ø•’•°•§•Î§œΩËÕ˝§«§≠§Þ§ª§Û°£ FIFO§Ú§‰§·§∆•Ω•±•√•»ƒÃøƧÀ§∑§ø§§§±§…°ƒ §Ω§Ï§Ú§‰§√§∆§Î§»√¶¿˛§∑§¡§„§√§∆5/27§ŒŒ˝Ω¨≤Ò§À¥÷§ÀπÁ§Ô§ §Ø§ §Í§Ω§¶°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/16 | |
|
°˙ 23:35
ÀË∆¸§≥§ƒ§≥§ƒ (•‚°º•∑•Á•Û∫∆¿∏•≥•Þ•Û•…ΩËÕ˝§Œº¬¡ı√Ê)
§¡§Á§√§»¬Œƒ¥…¸≥Ë°£ ° ∑«º®»ƒCGI§Œ≤˛Œ…§»§´Àø•ª•Û•µ§Úæ˘§Î∑Ô§»§´§œ§‚§¶§¡§Á§√§»¬‘§√§∆§Õ°À §≥§Ï§Þ§«•‚°º•∑•Á•Û¿©∏ʧœFIFO§À ¸§Í§≥§Þ§Ï§ø•‚°º•∑•Á•Û•«°º•ø§Ú∫∆¿∏§π§Î§¿§±§¿§√§ø§Œ§«°¢§´§ §Íƒ„•Ï•Ÿ•Î°£ ° •∑•ß•Î•π•Ø•Í•◊•»§«•«°º•ø§Ú ¸§Í§≥§Û§«§Þ§∑§ø°À § §Œ§«•‚°º•∑•Á•Û•«°º•ø•’•°•§•Î§ŒªÿƒÍ° ¿⁄§Í¬ÿ§®°À°¢º¬π‘°¢ƒ‰ªþ§¨§«§≠§Î§Ë§¶§À≤˛Œ…√Ê°£ §≥§Ï§¨§«§≠§Î§Ë§¶§À§ §√§ø§È•È•Ÿ•Î§»•∏•„•Û•◊§»æÚ∑Ô ¨¥Ù§Œº¬¡ı°ƒ§´§ °£ •‚°º•∑•Á•Û•◊•Ì•ª•√•µ§Œ•Ï•Ÿ•Î§Àƒ…§§…’§Ø§Œ§œ§§§ƒ§À§ §Î§´§∑§È°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/13 | |
|
°˙ 23:25
∫£∆¸§Œº⁄§Í ™ (•◊•È•Ï•π£≥ªÕœ∫°¢•◊•È•Ï•π•È°º£÷£¡£Œ)
§§§ƒ§¿§√§ø§´§Œ∫©ø∆≤Ò§«°÷•◊•È•Ï•π£≥ªÕœ∫§Œ•Þ•Û•¨∆…§Û§¿§≥§»§ §§§Û§«§π°◊§»œ√§∑§∆§§§ø§È°¢§§§∑§´§Ô§µ§Û§¨¬þ§∑§∆§Ø§¿§µ§Î§≥§»§À°£ °ƒ§√§∆°¢•œ•Û•∫§ŒªÊ¬Þ§À∞Ï«’ (¥¿ ∆…§þΩ™§®§Î§Œ§À§…§Ï§Ø§È§§ª˛¥÷§´§´§Î§¿§Ì§¶°£ §™ŒÈ§À°ƒ§»§§§¶§À§œ•Ð•Í•Â°º•ý§¨¡¥¡≥æا §§§Œ§¿§±§…°÷•®•Û•∏•ß•Í•√•Ø•Ï•§•‰°º°◊§Ú§™¬þ§∑§∑§Þ§∑§ø°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 23:14
∫£∆¸§Œ§™«„ ™ (•∏•Â•Û•’•Ì•Û¿˛ ¿÷)
§§§∑§´§Ô§µ§Û§»§¶§√§¡°º§¨•¢°º•Î•∆•£§« Ÿ∂Ø≤Ò§√§∆§≥§»§¿§√§ø§Œ§«°¢«„§§ ™§ƒ§§§«§ÀΩ©Õ’§ÿ§™§«§´§±°ƒ §¨°¢§§§∑§´§Ô§µ§Û§Ë§Í¿Ë§À√§§§∆§∑§Þ§√§ø§Œ§«°¢•Ì•Ð•√•»≤¶πÒ§ÿ§™«„ ™§À°£ •∏•Â•Û•’•Ì•Û¿˛§Œ¿÷§Ú∞ϬÞπÿ∆˛°£(¡∞≤Û°¢πı§–§´§Í«„§√§∆§∑§Þ§√§∆°¢«€¿˛ª˛§À∫§§Í§Ω§¶§ §Œ§«) §Ω§Œ∏°¢•Æ∏¶§Œ§‘§∑§§§µ§Û§À∞∆∆‚§∑§∆§§§ø§¿§§§∆°¢ •Õ•∏§Œ¿æ¿Ó§ÿ°£ § °¢§ §Û§´ª‰§¨Õþ§∑§´§√§ø§‚§Œ§¨∞Ï«’°£(•Õ•∏¿ÏÃÁ§Œ≈π§¿§»ª◊§√§∆§Þ§∑§ø) §Ω§¶§´§°°¢§≥§¶§§§¶≈π§ÀÕ˧ϧ–ºÍ§À∆˛§Î§Œ§Õ°£ ª˛¥÷§¨§¢§Î§»§≠§À§Þ§ø§Ê§√§Ø§Í«„§§ ™§ÀÕ˧Χ≥§»§À§∑§∆RT§Àµ¢¥‘°£ °ƒ§»°¢≤ø§‰§È¡«≈®§ §‚§Œ§¨£≤§ƒ§‚≈–æϧ∑§∆œ√§¨§œ§∫§Û§«§∑§Þ§§°¢§¢§√§»§§§¶¥÷§À19ª˛°£ --- µ¢¬§∑§∆§´§È°¢«„§¶§ƒ§‚§Í§¿§√§ø§‚§Œ§Ú¡¥¡≥«„§√§∆§ §§§≥§»§Àµ§…’§≠§Þ§∑§ø°£ RT§Œ≈≈∆∞•…•È•§•–°º§»§´°¢•Þ•Î•ƒ•—°º•ƒ¥€§ŒUSB•∑•Í•¢•Î —¥π¥»ƒ§»§´«„§¶§ƒ§‚§Í§¿§√§ø§Œ§À°ƒ orz --- ∏µµ§§À§ §√§ø§»ª◊§√§∆§œ§∑§„§Æ≤Û§√§∆§ø§È°¢µ¢§√§∆§≠§∆§´§È»ø∆∞§¨°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/11 | |
|
°˙ 18:49
√¶Œœ√Ê
GW√ʧÀÕ∑§”§π§Æ§ø»ø∆∞§«≈ð§Ï§∆§Þ§π°£ (ª≈ªˆ§À§œπ‘§√§∆§§§Þ§π§¨°ƒ) GW¡∞∏§À§™ÃÛ¬´§∑§øœ√§œΩµÀˆ§Ø§È§§§Þ§«§™¬‘§¡≤º§µ§§°£ °‰ ≥∆∞à ROBOTS DREAMS §œ§Þ§¿§∑§‚°¢PC Watch§À§Þ§«¥È§¨§«§∆§∑§Þ§§§Þ§∑§ø°ƒ(¥¿ (•≥•·•Û•»§ÀURL≈Ω§√§ø§Í§∑§ §§§Ë§¶§À°™°À º°§ŒÃÐ…∏§œ 6/18 §Œ¥ÿ≈Ï¡»Œ˝Ω¨≤Ò§´§ °ƒ§Ω§Œº°§¨ 8∑Ó§Œ ROBO-ONE SP°¢•Ì•Ð•´•Û•»•Í°ºV §√§∆§»§≥ --- 2006.05.11 21:00 Ω§¿µ ITmedia §«§œ§ §Ø PC watch §«§∑§ø°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/08 | |
|
°˙ 21:16
GWΩ™Œª
5/1,2 §ÀΩ–º“§π§Î ¨°¢5/8§Ú§™µŸ§þ§À§∑§ø§Œ§«°¢∫£∆¸§«GWΩ™Œª°£ Ãæ∏≈≤∞§œ≈∑µ§Œ…§´§√§ø§Œ§À≈ϵ˛§À√§§§ø§È±´°£ ª±ª˝§√§∆§∆Œ…§´§√§ø°£ §Û§«§‚°¢∫£≈Ÿ§´§È ø∆¸§Àæµ˛§π§Î§»§≠§œµ¢¬•È•√•∑•Â§Œª˛¥÷§Ú»Ú§±§Ë§¶°ƒ ∫«∂·≈≈º÷ƒÃ∂–§∑§∆§ §§§´§È°¢•È•√•∑•Â§Œ§≥§»§Ú§π§√§´§ÍÀ∫§Ï§∆§Þ§∑§ø°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/06 X+1 | |
|
°˙ 1:12
•Ì•Ð•’•°•§•»£≥Ω™Œª
•¥°º•Ï•ý§Ø§Û∆ıπÊΩȅҬʧ»§ §Í§Þ§∑§ø°£ ‚π‘ª˛§Œπ¯§Œπ‚§µ§Ú4cmÕÓ§»§∑§ø§∑§„§¨§þª—¿™§À§π§Î§≥§»§«≤ø§»§´≈ð§Ï§∫§À ‚§±§Î§Ë§¶§À§ §Í§Þ§∑§ø°£ ° §ø§¿§∑Õ≠¿˛¡ý∫Ó°À °ƒ§¨ ∞Ï≤Û¿Ô§œ•¢•Î•–°º•»§µ§Û§ÀKO…ȧ±° Œ©§¡æ§¨§Ï§ §§§Œ§«°ƒ°À «‘º‘…¸≥Ë¿Ô§«§œ§Í§“§»§µ§Û§ÀKO…ȧ±° Œ©§¡æ§¨§Ï§ §§§Œ§«°ƒ°À §Þ§¿§Þ§¿≤ð¬Í§¨∞Ï«’§«§π°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/04 X-9h | |
|
°˙ 23:54
X-9h ¬Á∫Â≈˛√Â
•€•∆•Î§«§ø§≥æ∆§≠ø©§Ÿ§∆§Î§»§≥°£ ∫£≤Û§œ•Õ•√•»§Úª»§®§Î…Ù≤∞§ §Œ§«∆¸µ≠§‚ΩÒ§±§Þ§π°£ °ƒ§ §Û§∆æÏπÁ§∏§„§ §Ø§∆•≥°º•«•£•Û•∞§»•‚°º•∑•Á•Û∫ӿƧ∑§ §≠§„°£ ¡¥ŒœΩ–§ª§Ω§¶§À§ §§§«§π°£§¥§·§Û§ §µ§§°°°‰°°§¢§Î§–°º§»§µ§Û [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 13:29
X-19h «€¿˛Ω§Õ˝°ıÕΩ»˜•–•√•∆•Í°º∫Ó¿Æ¥∞Œª
•≥•Õ•Ø•ø§Œ¬≠§Œ§»§≥§«¿Ðø®…‘Œ…§À§ §√§∆§§§Î§√§ð§§§Œ§«•–•§•—•π¿˛§Ú…’§±§∆¬–±˛°£ §œ§Û§¿§¥§∆§ÚΩ–§∑§ø§ƒ§§§«§ÀÕΩ»˜§Œ•–•√•∆•Í°º§Ú∫Ó¿Æ°£ §≥§Ï§«°¢•–•√•∆•Í°º£≥∏ƒ¬Œ¿©°£ °ƒ§»§§§¶§»§≥§Ì§«ª˛¥÷¿⁄§Ï°£ Œπª≈≈Ÿ§Ú§œ§∏§·§ §§§»°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 1:26
X-31h °ƒ¿Ðø®…‘Œ…≤’Ωͧ¨°ƒ
±¶µ”§Œ•µ°º•ÐøÆπÊ ¨«€¥»ƒ§À¿Ðø®…‘Œ…»Ø∏´°£ §ý§•°ƒ ∫£∆¸§œ§≥§≥§«∫Ó∂»√Ê√«§∑§∆°¢§œ§Û§¿∫Ó∂»§œÃ¿∆¸°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:47
X-32h §Þ°¢§Þ§¿¬≠∆ߧþ°ƒ
| |
| 2006/05/03 X-2 | |
|
°˙ 14:01
(•·•‚)mipsel-linux §Œ sys/socket.h Ω§¿µ
man select_tut §À∫Ч√§∆§Î•µ•Û•◊•Î§¨•Ø•Ì•π¥ƒ∂≠§«•≥•Û•—•§•Î§«§≠§ §§°ƒ §»°¢Œ…§Ø§þ§ø§È•Þ•Ø•Ì§¨¿Î∏¿§µ§Ï§∆§§§ §§§¿§±§«§∑§ø°£ sys/socket.h §À SHUT_RD, SHUT_WR, SHUT_RDWR §Œ¿Î∏¿§Úƒ…≤√§∑§ø§È§¶§Þ§Ø§§§≠§Þ§∑§ø°£ socket.h §œ¡∞§À§‚§…§√§´Ω§¿µ§∑§ø§Ë§¶§ ≥–§®§¨°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 3:10
§¿§´§È man ∏´§ §µ§§§√§∆§–°ƒ
£≥ª˛¥÷ƒ¯§´§±§∆∫Ó§√§ø»Û∆±¥¸•Ω•±•√•»§Œ•◊•Ì•∞•È•ý §œ man select_tut (ª≤πÕ°ßselect tutorial ∆¸ÀÐ∏ÏÃı) §À§€§Ð∆±§∏•◊•Ì•∞•È•ý§¨∫Ч√§∆§Þ§∑§ø°ƒ orz §∑§´§‚°¢µÓ«Ø§Œ10∑Ó§À man select_tut ∏´§∆§Î°ƒ §¶°º§Û°ƒª˛¥÷§Úõ¬Ã§À§∑§∆§∑§Þ§§§Þ§∑§ø°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:52
ÀË∆¸§≥§ƒ§≥§ƒ (•Ω•±•√•»ƒÃøÆ)
¿§¥÷§œ¬Á∑øœ¢µŸ§¿§»§§§¶§Œ§ÀŒÒƒÃ§Í§À§™ª≈ªˆ°£ §≥§Ï§Þ§« L-Card§À•Ì•∞•§•Û§∑§∆•≥•Þ•Û•…∆˛Œœ§∑§∆§§§ø§Œ§¿§±§…°¢•Ê°º•∂•◊•Ì•ª•π§Œ¿⁄§Í¬ÿ§®§¨µØ§≠§Î§»•µ°º•Ð¿©∏Ê¥»ƒ§»§ŒƒÃøƧ¨£±•µ•§•Ø•Î»Ù§Û§«§∑§Þ§§§Þ§π°£ § §Œ§«°¢•Õ•√•»∑–Õ≥§«ƒæ¿Ð¡ý∫Ó§«§≠§Î§Ë§¶§À»Û∆±¥¸•Ω•±•√•»ƒÃøÆΩËÕ˝§Ú¡»π˛§þ√Ê°£ ¥¡√º¬∏≥§¨Ω™§Ô§√§ø§Œ§«§≥§Ï§´§È•·•§•Û•Î°º•¡•Û§À≈˝πÁ§«§π°£ õ¿˛ƒÃøƧŒΩËÕ˝§Þ§«∫ӧΪ˛¥÷õ§µ§Ω§¶°ƒ •Ì•Ð•’•°•§•»§√§∆Õ≠¿˛¡ý∫Ó§«§‚§§§§§Û§¿§√§±§´°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/05/02 X-3 | |
|
°˙ 2:08
ÀË∆¸§≥§ƒ§≥§ƒ (•∏•„•§•Ì•’•£°º•…•–•√•Ø)
L-Card§Œ•¢• •Ì•∞∆˛Œœ§À∑“§§§¿•∏•„•§•Ì(KRG-3)§Œ√Õ§Ú∆…§Û§«°¢∏∂≈¿§´§È§Œ∫𠨧Ú∑◊ªª§∑§∆ 1/10 §∑§∆°¢π¯§Œ•‘•√•¡º¥§À•’•£°º•…•–•√•Ø§π§Î§»§≥§Ì§Þ§«¥∞¿Æ°£ ¬≠∆ߧþ§¨§¡§Á§√§»§œ∞¬ƒÍ§∑§ø§´§ °ƒ §«§‚°¢¬Á§≠§Ø≈ð§Ïªœ§·§Î§» ‰¿µ§¨¬≠§Í§ §§¥∂§∏°£ »ÊŒ„¿©∏ʧ¿§±§∏§„§ §Ø§∆¿— ¨¿©∏ʧ‚§∑§ §≠§„•¿•·°© (¿— ¨§π§Î§Ø§È§§§ §È≤√¬Æ≈Ÿ•ª•Û•µ§Œ√Õ§Úª»§¶§Ÿ§≠§´§‚) °ƒ§√§∆°¢•∏•„•§•Ì§œ§≥§Ï§Ø§È§§§À§∑§∆•‚°º•∑•Á•Û¿©∏ʧ»•‚°º•∑•Á•Û∫ӿƧÀø §Þ§ §§§»°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:15
°÷ª©∑Ó°◊ §Þ§¿§Þ§¿ÃΧœŒ√§∑§§
§ §Û§´°¢∆¸√ʧœ§·§√§¡§„ΩΧ´§√§ø§È§∑§§§«§π§¨°ƒ (ª≈ªˆ§∑§∆§§§ø§Œ§«¬Œ∏≥§∑§∆§Þ§ª§Û) ÃΧÀ§ §√§ø§È∞ϵ§§ÀŒ√§∑§Ø§ §Í§Þ§∑§ø°£ ÿ∆¸§ŒÕΩ¡€∫«π‚µ§≤π§œ 17≈Ÿ °ƒ§√§∆°¢∫£∆¸§Ë§Í10≈Ÿ§‚ƒ„§§§∏§„§Û°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/30 X-5 | |
|
°˙ 19:08
§™¡˚§¨§ª§∑§Þ§∑§ø
§Õ°¢§Õ§∏§¨¥À§Û§«§§§ø§¿§±§«§∑§ø°£(¥¿ ≤æ¡»§þ§¿§±§«•Õ•∏•Ì•√•Ø∫Þ√§±§∆§§§Þ§ª§Û§«§∑§ø°£ §€§Û§»°¢§‚§¶•¿•·§´§»ª◊§√§ø°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 18:33
§¿§·§´§‚°ƒ
§µ°¢ ‚π‘•‚°º•∑•Á•Û∫Ó¿Æ°™ °ƒ§»ª◊§√§ø§Œ§À§ §º§´¬≠∆ߧþ§π§È§«§≠§ §§æı¬÷°£ •‚°º•∑•Á•Û§Ú∫∆¿∏§π§Î§» 2350 •µ°º•Ð§œ∫Ÿ§´§Øø∂∆∞§π§Î§¿§±§«∆∞§´§ §§°£ § °¢§ §À§¨µØ§≠§∆§Î§Û§¿§Ì§¶°ƒ°©°©°© °÷2346 §» 2350§Ú∫Æ∫þ§µ§ª§Î§»§¶§Þ§Ø∆∞§´§ §§°◊§√§∆§§§¶§Œ§œ§≥§Œ§≥§»§ §Œ§´§ °ƒ π¯§Œ2350§œÃ‰¬ÍΩ–§∆§ §§§Œ§À°ƒPIC§Œ∆±§∏•ð°º•»§À2346§»2350§¨∫Æ∫þ§π§Î§»§¿§·§ §Û§¿§Ì§¶§´°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/29 X-6 | |
|
°˙ 21:06
(URL•·•‚)USB•∑•Í•¢•Î —¥π¥»ƒ
IRC§«∂µ§®§∆§‚§È§√§ø§Œ§«•·•‚ •Þ•Î•ƒ•—°º•ƒ¥€ °⁄CPA02A°€ CP2102° USB-UART•÷•Í•√•∏°À —¥π•¢•¿•◊•ø°º¥»ƒ°¶•…•È•§•–•Ω•’•»…’§≠ •™•Í•∏• •Î•Ð°º•… DIP•µ•§•∫§Œ¥»ƒ§À¡¥§∆§¨∆˛§√§∆ ÿÕ¯§Ω§¶°£ §…§√§´¬æ§«§‚ª˜§ø§Ë§¶§ §ŒΩ–§∑§∆§øµ§§¨§π§Î§±§…°ƒ§…§≥§¿§√§±°£ §√§∆°¢•π•»•Ì•Ÿ•Í°º°¶•Í• •√•Ø•π§µ§Û§«§∑§ø°£ £∆£‘£≤£≥£≤£“£Ã°°£’£”£¬¢™•∑•Í•¢•Î —¥π•‚•∏•Â°º•Î•≠•√•» --- ∫£∆¸§œ∞ÏΩµ¥÷ ¨§Œ»Ë§Ï§¨Ω–§∆°¢•Ÿ•√•…§«§¥§Ì§¥§Ì°£ ∫£§Œ§»§≥§Ìø ƒΩ§ §∑§«§π°£°÷¬≠∆ß°◊§Þ§«§«§≠§∆§Î§Œ§À°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/27 X-8 | |
|
°˙ 23:55
ÀË∆¸§≥§ƒ§≥§ƒ°ƒ§«§≠§∆§ §§§±§…°ƒ
•µ°º•Ð∆˛§Ï¬ÿ§®∏°¢°÷¬≠∆ߧþ°◊§Œ•‚°º•∑•Á•Û≥Œ«ß§Þ§«≈˛√£°£ •Ì°º•Îº¥•µ°º•Ð§¨ 2144 §´§È 2346/2350 §À§ §√§ø§Œ§« °÷•‚°º•∑•Á•Û∫ӧ̓æ§∑§´§ °ƒ°◊ §»ª◊§√§ø§±§…°¢§Ω§Œ§Þ§Þ§«§¢§√§µ§Í∆∞∫Ó°£ °ƒÃ‰¬Í§œ ‚π‘•‚°º•∑•Á•Û°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 1:13
∆˛æÏ∑Ù≈˛√Â
| |
| 2006/04/26 X-9 | |
|
°˙ 20:00
¡«ª“§Œ«—»◊°ƒ
•Ÿ•π•»•∆•Ø•Œ•Ì•∏°º§Œ°÷∏Êœ¢ÕÌ°◊§¨ππø∑§µ§Ï§∆§§§Î§Œ§«∏´§Àπ‘§√§ø§È°ƒ •Ì°º•ø•Í°º•®•Û•≥°º•¿∫∆»Œ§ŒÕΩƒÍ §…§¶§∑§∆§‚∏Ì∆…§π§Îª‰§œ§‰§√§—§Í —§¿§»ª◊§§§Þ§π°£ °÷Õ€ª“ ¯≤ı°◊§‚∏Ì∆…§∑§Þ§π°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/25 X-10 | |
|
°˙ 22:48
KO•µ°º•Ð•€°º•Û§Œ»Îé
•¶•Ω§«§π°£»Î駫§‚≤ø§«§‚§¢§Í§Þ§ª§Û°£ ª‰§¨§∫§√§»µ§…’§´§ §´§√§ø§¿§±§«§π°£ •¥°º•Ï•ý§Ø§Û§Ú ¨≤Ú¿∞»˜§π§Î§» 2°¡3≈Ÿ∏∂≈¿§¨§∫§Ï§Î§≥§»§¨§¢§√§∆°¢ °÷°©°©°©°©°◊ æı¬÷§¿§√§ø§Œ§«§π§¨°¢ªœ§·§∆§´§È£¥«Ø∑–§√§∆§Ë§¶§‰§Ø»Ω§Í§Þ§∑§ø°£ •µ°º•Ð•€°º•Û§Œ•ª•Ï°º•∑•Á•Û§√§∆£¥§«≥‰§Ï§ §§øÙ(¬ø ¨)§À§ §√§∆§Î§Û§«§π§Õ°£ § §Œ§«°¢•€°º•Û§Ú180≈Ÿµ’§µ§Þ§À…’§±§Î§»≥—≈Ÿ§¨§∫§Ï§Î§Œ§«§∑§ø°£ (90≈Ÿ§«§‚§∫§Ï§Ω§¶) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 21:59
ÀË∆¸§≥§ƒ§≥§ƒ (§≥§ƒ§≥§ƒ§ŒŒÃ§¨¬≠§Í§ §§°ƒ)
∏‘¥ÿ¿·•Ì°º•Îº¥§Œ•¨•ø§ƒ§≠§œ°¢•¢•Î•þ•€°º•Û∏Ú¥π§«≤˛¡±°£ •€°º•Û§Œ•ª•Ï°º•∑•Á•Û§À•Õ•∏•Ì•√•Ø∫Þ§¨§≥§”§Í§ƒ§§§∆§§§Î§Œ§¨∏∂∞¯§Œ§Ë§¶§À§‚ª◊§§§Þ§π°£ §¨°¢§∑§´§∑°¢ø ƒΩ§¨∞≠§π§Æ°ƒ §∑§´§‚•´•¶•Û•»•¿•¶•Û§¨¥÷∞„§√§∆§Î°ƒ§¢§»10∆¸§∑§´§ §§°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:11
Ω…≥Œ ð
§Ω§Û§ §≥§»§Ë§Í≥´»Øø §·§ §µ§§§Ë§√°™ °ƒ§ §Û§∆∏¿§√§∆§Î§»Ω…§¨Ãµ§Ø§ §√§¡§„§¶§Œ§«ÕΩÃÛ§∑§Þ§∑§ø°£ °÷¬Á∫§ §Û§–•Ô•∑•Û•»•Û•€•∆•Î•◊•È•∂°◊ 5/4°¡5/6 [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/24 X-11 | |
|
°˙ 12:20
ÀË∆¸§≥§ƒ§≥§ƒ (∏∂≈¿ƒ¥¿∞¥∞Œª)
¿ˆ¬ı§∑§∆¡ðΩ¸§∑§∆ŒØ§√§øø∑ π∆…§Û§«°ƒ§√§∆§‰§√§∆§ø§È§¢§√§»§§§¶§Þ§ÀÃΰ£ ≤ºªË•µ°º•Ð§Œ∏∂≈¿ƒ¥¿∞§∑§∆ƒæŒ©§π§Î§»§≥§Ì§Þ§«§«ª˛¥÷¿⁄§Ï°£ ∏‘¥ÿ¿·•Ì°º•Îº¥§Œ•¨•ø•ƒ•≠§œ•µ°º•Ð§∏§„§ §Ø§∆•µ°º•Ð•€°º•Û§ŒÃ‰¬Í§Œ§Ë§¶§ ¥∂§∏°£ §™§´§¿§µ§Û§´§È§§§ø§¿§§§ø•µ°º•Ð•€°º•Û§Œ§€§¶§¨§´§√§¡§Í§∑§∆§Î§Œ§«∫£ÃÎ∆˛§Ï¥π§®§∆•∆•π•»°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/22 X-13 | |
|
°˙ 19:07
ÀË∆¸§≥§ƒ§≥§ƒ (≤ºªË¡»§þŒ©§∆¥∞Œª)
  R-Blue vs MetallicFighter 2006.04.20 RT§À§∆ ªÓ§∑§À1∏ƒ§Œ2346§Ú∫∆•∞•Í•π•¢•√•◊§∑§ø§±§…æı∂∑ —§Ô§È§∫°£≤Û≈æ§À§œÃ‰¬Í§ §§§þ§ø§§§ §Œ§«§Ω§Œ§Þ§Þª»§¶§≥§»§À°£ 2350§œ ¨≤Ú¿∞»˜§«•π•ý°º•∫§À≤ۧΧ˧¶§À§ §Í§Þ§∑§ø°£ ∫£°¢≤ºªË§Œ¡»§þŒ©§∆§Þ§«Ω™§Ô§√§ø§»§≥§Ì°£ »’§¥§œ§Û§Œ∏§œ°¢«€¿˛°¢∏∂≈¿ƒ¥¿∞°¢¥ÀЕ‚°º•∑•Á•Ûƒ¥¿∞°ƒ§´§ °£ ºÃøø§œ 4/20 §Œ•π•—°º•Í•Û•∞°£•–°º•¡•„•Ì•Û…˜§Àª£§√§∆§þ§Þ§∑§ø°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 2:44
ÀË∆¸§≥§ƒ§≥§ƒ (§“§»•Þ•π÷§Î°ƒ)
§§§§≤√∏∫§Àƒ´ ˝§À§∑§ §§§»§Þ§∫§§§Ë§¶§ °ƒ °÷§µ§¢¡»§þŒ©§∆§Ë°º°◊§»•µ°º•Ð§Ú∞ϧƒ∞ϧƒ≥Œ«ß§∑§ø§È°¢¡∞§À∫Ó∂»§∑§ø4∏ƒ§Œ2346§Œ≤Û≈æ≤ª§¨ —°£ ∫Ú∆¸∫Ó∂»§∑§ø ¨§»∆±§∏§Ë§¶§À•∞•Í•π§Ú¬øÃЧÀ§∑§ §≠§„§¿§·§ §Œ§´§ °£ •⁄•Û•¡§«§∞§Í§∞§Í§‰§√§∆§™§´§∑§Ø§ §√§ø 2350 §‚ ¨≤Ú¿∞»˜§π§Î§ŒÀ∫§Ï§∆§Þ§∑§ø°£ § §Œ§«∫£∆¸§Œ§™√Χœ§‚§¶∞Ï≈Ÿ ¨≤Ú¿∞»˜°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/21 X-14 | |
|
°˙ 13:46
(URL•·•‚)Armadillo-200•∑•Í°º•∫§Œø∑∑ø
•¢•√•»•Þ°º•Ø•∆•Ø•Œ •◊•Ï•π•Í•Í°º•π Ã檅•µ•§•∫§Œƒ∂æÆ∑ø•≥•Û•‘•Â°º•ø°÷Armadillo-200•∑•Í°º•∫°◊3µ°ºÔ§Ú≥´»Ø §´§È ≥∆¿Ω… §Œ∆√ƒπ§«§π§¨°÷A220°◊§œUSB§Ú≈Î∫Ч∑§∆§™§Í°¢Œ„§®§–∑◊¬¨µ°¥Ô§À•«°º•ø§Ú√þ¿—§∑§ø§Í°¢§Ω§Œ•«°º•ø§Ú•Õ•√•»•Ô°º•Ø§ÿ≈桘§π§Îµ°«Ω§Úƒ…≤√§π§Î§»§§§√§øÕ¯Õ— ˝À°§¨∏´π˛§Þ§Ï§Þ§π°£ A210§ÀUSB¡ı»˜°™ §»ª◊§√§ø§Œ§¿§±§…°ƒ Armadillo-220¿Ω… ª≈ÕÕ§À§Ë§Î§»¥»ƒ•µ•§•∫§¨«Ð°£ §«§‚°¢§≥§Ï§Úª»§®§–USB•´•·•È…’§±§È§Ï§Î§∑°¢USB•§•Û•ø•’•ß°º•π…’§≠§ŒPIC18§»π‚¬ÆƒÃøƧ«§≠§Î§´§‚°£ GPIO§¨16ÀЧÀ§ §√§ø§±§…°¢§‰§√§—§Í•¢• •Ì•∞∆˛Œœ§œÃµ§∑°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 2:35
ÀË∆¸§≥§ƒ§≥§ƒ (•µ°º•Ð ¨≤Ú¿∞»˜¥∞Œª)
•Ì•Ð•’•°•§•»£≥§Þ§«§¢§»2Ωµ¥÷°£ §Ë§¶§‰§Ø≤ºªË•µ°º•Ð§Œ ¨≤Ú¿∞»˜§¨Ω™§Ô§Í§Þ§∑§ø°£ (Œæ∏™§Œ PDS-2174§Œ¿∞»˜§œƒ¸§·) •∞•Í•π§œ«ˆ§Ø…’§±§ø§€§¶§¨Œ…§§§»ª◊§√§∆§§§ø§±§…∞„§¶§Û§«§π§Õ°£ •∞•Í•π§Úæا §·§À§∑§ø§È≤Û≈槨Ω≈§Ø§ §√§∆§∑§Þ§√§∆§‰§Íƒæ§∑§À§ §√§∆§∑§Þ§§§Þ§∑§ø°£ --- §Ô§¢°¢∫Ú∆¸§Œ∆¸µ≠§¨≈≈«æ …ø∑ π§Œ•»•√•◊µ≠ªˆ§À°ƒ §¢§Ï§¨•»•√•◊§À§ §Î§»§œª◊§§§Þ§ª§Û§«§∑§ø°£ §§§ƒ§‚§¢§Í§¨§»§¶§¥§∂§§§Þ§π°£ °‰ ONO§µ§Û [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/20 X-15 | |
|
°˙ 23:40
∫£∆¸§Œ§™«„ ™ (SC-2350ARM10)
•¢°º•Î•∆•£§«§Œ R-Blue vs MetallicFighter §Ú¥—¿Ô§π§Î§ø§·°¢ª≈ªˆ§Ú¡·§Ø槨§√§∆ºÛ≈‘π‚¬Æ»Ù§–§∑§∆Ω©Õ’§ÿ°£ √§§§∆§þ§ø§È R-Blue°¢MetallicFighter°¢•»•≥•»•≥¥ð°¢•¢•’•Ì §»§§§¶πÎ≤⁄•´°º•…°£ ROBO-ONE•»•√•◊•Ï•Ÿ•Î§ŒµªΩ—§Ú¥÷∂·§À∏´§È§Ï§∆ Ÿ∂اÀ§ §Í§Þ§∑§ø°£ ¥—¿Ô∏°¢ÕΩÃÛ§∑§∆§¢§√§ø SC-2350ARM10 (SC-EZA¿ƒ•—°º•ƒ§Œ∂Ø≤Ω»«)§Úºı§±ºË§√§∆µ¢¬°£ §≥§Œ•—°º•ƒ§Œº¬¿Ô≈Í∆˛§œ¬Ë10≤Û¬Á≤Ò§´§ °ƒ ∫£§´§È°¢ªƒ§Î2∏ƒ§Œ2346§Ú ¨≤Ú¿∞»˜°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 23:32
¿ËΩµÀˆ§Œ§™«„ ™ (•Ì•Ð•≥•Û•Þ•¨•∏•Û°¢Ω’ ™•∏•„•±•√•»)
ΩÒ§≠À∫§Ï§∆§§§Þ§∑§ø§¨°¢•Ì•Ð•≥•Û•Þ•¨•∏•Û No.45 §œ§¡§„§Û§»«„§§§Þ§∑§ø°£ °ƒƒÍ¥¸π÷∆…§∑§ §§§»§Þ§∫§§°©°© §¢§»°¢§™µ§§À∆˛§Í§Œ•∏•„•±•√•»§Ú√§ƒ§÷§∑§¡§„§√§ø§Œ§«°¢ø∑§∑§§§Œ§Ú°£ §Û§Û°ƒ§ §Û§´∏™º˛§Í§¨§≠§ƒ§§°ƒ (¥¿ §Ω§Ì§Ω§ÌÀ姧««ÿ√ʧŒ§º§§∆˘ÕÓ§»§µ§ §≠§„§¿§·§´§ °£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 1:10
ÀË∆¸§≥§ƒ§≥§ƒ°ƒ°©°©°©
»Ë§Ï§∆Ã≤§§§«§π°£∫£»’§‚º¬∫Ó∂»§œ§™µŸ§þ°£ ¿Ë∑Ó°¢§þ§π§þ•Ì•Ð•√•»∏¶µÊΩͧŒ∫Ó∂»∆¸ªÔ§ÀΩÒ§´§Ï§∆§§§ø°÷4014•’•Í°º•€°º•Û§œª»§®§Î°™°◊§Ú∏´§∆°¢Ãëڧ§§ °º§»ª◊§√§∆§§§ø§Œ§«§π§¨°ƒ ∫£∆¸°¢µ◊§∑§÷§Í§À SC-EZA§Œ•—°º•ƒ§Ú∏´§∆§§§∆§’§»µ§…’§≠§Þ§∑§ø°£ »ø¬–º¥•’•Í°º•€°º•Û§Œ•Ÿ•¢•Í•Û•∞§Œ∑ͧ»°¢…∏Ωýº˘ªÈ•€°º•Û§Œº¥…Ù§Œ¬¿§µ§¨∆±§∏°™ 3mm§Œ•Õ•∏§«∑“§∞§Ë§Í§‚æÊ…◊§«§§§§§´§‚°£ •Ì•Ð•’•°•§•»£≥§¨Ω™§Ô§√§ø§È≤ºªË§Ú∫ӧͧ §™§Ω§√§» [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/19 X-16 | |
|
°˙ 16:58
ÀË∆¸§≥§ƒ§≥§ƒ°ƒ°©
ªƒ§Î 2346 2∏ƒ§Ú ¨≤Ú¿∞»˜§∑§∆∞ϵ§§À¡»§þæ§≤ §Œ§ƒ§‚§Í§«§∑§ø§¨°ƒ ∑«º®»ƒCGI§Àª®¡§Ë§±µ°«Ω§Úƒ…≤√§∑§∆§§§ø§È§…§Û§…§Û√¶¿˛§∑§∆§∑§Þ§√§∆•Ì•Ð≥´»Ø§Œø ƒΩ•º•Ì°£(¥¿ ª®¡§Ë§±∑«º®»ƒ•‚•«•Î•Î°º•ý ≈∆§µ§Û§Œ§»§≥§»∆±§∏§Ë§¶§À¬≠§∑ªª§Œ≈˙§®§Ú∆˛§Ï§Î§Ë§¶§À§∑§Þ§∑§ø°£ •ª•√•∑•Á•Û¥…Õ˝§»§´•π•Ï•√•……Ωº®µ°«Ω§»§´ƒ…≤√§∑§ø§§§±§…¿Ë¡˜§Í°£ (≤˛¬§§π§Î§Û§∏§„§ §Ø§∆°¢§Ω§¶§§§¶∑«º®»ƒCGIª˝§√§∆§Ø§Ï§–§§§§§∏§„§Û§Ë°ƒ) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/18 X-17 | |
|
°˙ 1:18
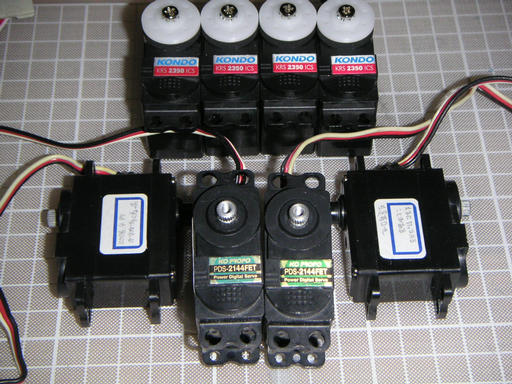
ÀË∆¸§≥§ƒ§≥§ƒ (≤ºªË ¨≤Ú°ı•Ð•»•ý•±°º•π∏Ú¥π)
∫Ú∆¸§Œ∆¸µ≠§ÀΩÒ§§§øƒÃ§Í°¢≤ºªË ¨≤Ú§Œ¬≥§≠§»•Ð•»•ý•±°º•π§Œ∏Ú¥π°£ ª∞∏ƒÃЧŒ∏Ú¥π√ʧÀ°¢•Ð•»•ý•±°º•π§ŒŒ¢§À¿Ω¬§«Ø∑Ó§ÚΩÒ§§§ø•∑°º•Î§¨≈Ω§È§Ï§∆§§§Î§≥§»§Àµ§…’§≠§Þ§∑§ø°£ ∏Ú¥π¬–æ𧿧√§ø 2144§œ 200207TS §» 200212TS°£2350¬¶§œ 200412KU°£ 2002«Ø7∑Ó§œ¬Ë£≤≤Û¬Á≤Òƒæ¡∞°¢2002«Ø12∑Ó§œ¬Ë£≥≤Û¬Á≤Òƒæ¡∞§«§π§Õ°£ §‚§∑§´§∑§ø§È∆Û∏ƒ§»§‚¬Ë£≥≤Û¬Á≤Ò§Œ•Í•Û•∞§À槨§√§ø§Œ§´§ °ƒ ƒπ§§¥÷¥Ëƒ•§√§∆§Ø§Ï§∆§¢§Í§¨§»§¶°£ •π•ð•√•»•È•§•»§ÚÕ·§”§È§Ï§ §Ø§∆§¥§·§Û§ §µ§§°£ --- §»§§§¶§≥§»§«°¢2350•È•Ÿ•Î§Œ2346§¨4∏ƒ°¢2346…˜§Œ2350§¨4∏ƒ°¢2350…˜§Œ2144§¨4∏ƒ§«§≠§Þ§∑§ø°£ ∏ΩÃÚ§Œ2144§œ∏‘•Ë°ºº¥§Œ2∏ƒ§¿§±°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/17 X-18 | |
|
°˙ 1:10
ÀË∆¸§≥§ƒ§≥§ƒ
§¶°º§Û°ƒªƒ§Í∆ÛΩµ¥÷§»§¡§Á§√§»§ §Œ§À§≥§Œæı∂∑§œ°ƒ ∑Î∂…3∆¸¥÷ø ƒΩ§¨Ãµ§´§√§ø§Œ§«°¢∏‘¥ÿ¿·§»¬≠ºÛ§Œ 2144 ¨≤Ú¿∞»˜§œ¿Ë¡˜§Í°¢ø∑… §Œ2350§»∏Ú¬ÿ°£ 2350§Œ•Ð•»•ý•±°º•π§œ»ø¬–º¥Ãµ§∑§Œ§‚§Œ§À∏Ú¥π°£ §Ω§∑§∆°¢•‘•√•¡º¥§Àª»§√§∆§§§ø 2346 §Ú¬≠ºÛ•‘•√•¡§»•Ì°º•Î§ÿ°¢ªƒ§Í§œ 2350§À¥π¡ı°£ •Ì°º•Î ˝∏˛§Œ•‚°º•∑•Á•Û§¨∫ӧ̓æ§∑§À§ §Î§±§…ª≈ ˝§ §§°£§‚§»§‚§»ƒæ§µ§ §≠§„•¿•·§¿§√§ø§∑°£ §»§§§¶∫Ó∂»§Úÿ∆¸§ŒÃΧÀ§‰§Î§≥§»°£(§®§√°© [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/15 X-20 | |
|
°˙ 13:30
§¶§¶°ƒ∑Î∂…£≤∆¸ø ƒΩõ§∑
ª≈ªˆ§¨Àª§∑§§§Œ§Ë§Í§‚°¢§ƒ§§§ƒ§§F.S.S.§Ú∆…§þ§´§®§∑§∆§∑§Þ§¶§≥§»§Œ§€§¶§¨Ã‰¬Í°ƒ •Ÿ•√•…§´§È±Û§§ÀÐ√™§À∞Ð§Ω§¶°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/13 X-22 | |
|
°˙ 23:51
∞Ï≤ÛµŸ§þ
∫£∆¸§œ»Ë§Ï§∆§∆ÃµÕ˝°£ ÿ∆¸°¢∆Û∆¸ ¨¥Ëƒ•§Í§Þ§π°£ (§Ω§∑§∆≈⁄ÕÀ∆¸§Àø≤π˛§Û§«•¡•„•È§À§ §Í§Ω§¶§ °ƒ) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 2:24
ÀË∆¸§≥§ƒ§≥§ƒ (≤ºªË ¨≤Ú§Ω§Œ£≤)
  ±ß√˧ §È§≥§Ï§«§‚°ƒ §µ§π§¨§À0ª˛≤·§Æµ¢¬§¿§»∫Ó∂»ª˛¥÷§¨°ƒ ¬Á¬Ð…Ù ¨§ÚºË§Í≥∞§∑§ø§»§≥§Ì§«ª˛¥÷¿⁄§Ï°£ °÷µ”§¨…’§§§∆§§§ §§°◊ °÷§¢§Û§ §‚§Œ§œæ˛§Í§«§π°™∞Œ§§øÕ§À§œ°ƒ°◊ --- ¿µ§∑§§•ª•Í•’§ÚÀ∫§Ï§¡§„§√§ø°£ •”•«•™∏´ƒæ§µ§ §≠§„°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/12 X-23 | |
|
°˙ 21:06
§⁄§Û§»§¨ROBO-ONE GPª≤¿Ô°™
ROBO-ONE GP ∏¯º∞•⁄°º•∏(Õ◊FLASH Player)§¨ππø∑§µ§Ï§∆§§§Î§Œ§«∏´§Àπ‘§√§ø§È°ƒ § §Û§» Aerobattler §⁄§Û§» §¨GP¡™ºÍ§À°™ § §∞§µ§Û°¢§™§·§«§»°º§¥§∂§§§Þ§π°º §≥§Ï§«Õ≠Ãæ§À§ §√§∆ JR≈Ï∆¸ÀЧ¨•π•ð•Û•µ°º§À…’§Ø§»§§§§§«§π§Õ°º°º°º°º [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:54
ÀË∆¸§≥§ƒ§≥§ƒ (•µ°º•Ð ¨≤Ú¿∞»˜)
œ¢∆¸§ŒÃÎππ§∑§¨§ø§ø§√§∆°¢∫Ú∆¸§œÕº ˝§Þ§«…˙§ª§√§∆§Þ§∑§ø°£ (º´¿©ø¥§ §µ§π§Æ§¿§√§∆§–§µ°ƒ) ∫Ú»’§À¬≥§§§∆•µ°º•Ð§Œ ¨≤Ú¿∞»˜°£ µ◊§∑§÷§Í§»§œ§§§®°¢4∏ƒ•–•È§∑§∆•Æ•¢¿ˆæÙ§∑§∆¡»§þæ§≤§Î§Œ§À2ª˛¥÷»æ§√§∆°ƒ §ƒ§§§«§À•¢•√•—°º•±°º•π§Ú•·•ø•Î•÷•√•∑•Â§À∏Ú¥π°£ 2350§Œ•È•Ÿ•Î§À§ §√§¡§„§√§∆§Î§´§Èƒ•§Í¬ÿ§®§ §≠§„§Õ°£ ÿ∆¸§œ¬¿¬Ð(∏‘•‘•√•¡)§Œ•µ°º•Ð£≤§ƒ°£ ¬≠ºÛ•Ì°º•Î§»∏‘•Ì°º•Î§Œ£¥§ƒ§œ 2350§»∏Ú¥π§´§ °ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/11 X-24 | |
|
°˙ 0:14
ÀË∆¸§≥§ƒ§≥§ƒ (≤ºªË ¨≤Ú)
§≥§≥§Œ§»§≥§Ì ‚π‘∑±Œ˝§¨¬≥§§§ø§ª§§§´≤ºªË§Œ•µ°º•Ð§¨•¨•ø•¨•ø°£ •‘•√•¡º¥§ŒKRS-2346§œ≤Û≈槨Ω≈§Ø§ §√§∆•∞•Í•∞•Í≤ª§¨§π§Îƒ¯≈Ÿ§¿§±§…°¢∏‘•Ì°º•Îº¥§ŒPDS-2144§œ§Ω§Ì§Ω§Ì∏¬≥¶§√§ð§§°£∫∏∏‘•Ì°º•Î§Œ2144§œ3≈Ÿ§Ø§È§§•¨•ø§¨Ω–§¡§„§√§∆§Î°£ ∫∏±¶§Œ¬ŒΩ≈∞Ð∆∞§¨ —§ §Œ§œ§≥§Ï§¨∏∂∞¯§ §Œ§´§ °ƒ 4§ƒªƒ§√§∆§Î2350§Ú≈Í∆˛§∑§∆2144§œ¬ýÃÚ§µ§ª§Î§Œ§¨§§§§§´§ §°°ƒ§¶°º§Û°£ °ƒ§ §…§»«∫§þ§ƒ§ƒ≤ºªË§Ú ¨≤Ú√Ê°£ ÿ∆¸§œ•µ°º•Ð§Ú ¨≤Ú§∑§∆•Æ•¢¿ˆæÙ°£(2«Ø§÷§Í°©) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/10 X-25 | |
|
°˙ 1:03
(∫Ó∂»•·•‚)ÀË∆¸§≥§ƒ§≥§ƒ (MMC§Œ•–•∞§»§§§¶§´ª≈ÕÕ)
•Æ•¢¿ˆæÙ§π§Î§ƒ§‚§Í§¨§‚§¶§≥§Û§ ª˛¥÷°ƒ L-Card§Œ≈≈∏ªÕÓ§»§π¡∞§Àµ◊§∑§÷§Í§À•·•§•ÛPC§ÿ•–•√•Ø•¢•√•◊°£ °ƒ§∑§Ë§¶§»ª◊§√§ø§È§ §º§´MMC(Magical Motion Creator°ß§»§§§¶Ã槌»æµ’±ø∆∞≥ÿ∑◊ªª°Ð•π•Ø•Í•◊•»•≥•Û•—•§•È)§Œ•·•Û•∆§Úªœ§·§∆•–•∞»Ø∏´°£ ¥ÿ¿·≥—§Œ ‰¿µ√Õ§œ≥—≈Ÿæ Û§Þ§ø§œ∫¬…∏æ Û§»∆±§∏π‘§Àµ≠Ω“§µ§Ï§ §±§Ï§–§§§±§ §§°£ ‰¿µ√Õ§¨ªÿƒÍ§µ§Ï§∆§™§Í°¢§´§ƒ∆±∞Ïπ‘§À ‰¿µ¬–æ𧌥ÿ¿·≥—§¨µ≠Ω“§µ§Ï§∆§§§ §§(§Þ§ø§œµ’±ø∆∞≥ÿ∑◊ªª∑Î≤çÀ¥ÿ¿·≥—§¨∏Ω§Ï§ §§)æÏπÁ°¢•≥•Û•—•§•È§œ (Runtime Error: Leg param error) §»§∑§∆§Ω§Œπ‘§ÚõªÎ§π§Î°£ Œ„) §‚°¢§‚§∑§´§∑§∆°ƒ§≥§Œ∞ÏΩµ¥÷ ‚𑧨§¶§Þ§Ø§§§´§ §´§√§ø§Œ§œ§≥§Ï§¨∏∂∞¯°© •≥•Û•—•§•Îª˛§Œ•®•È°º•·•√•ª°º•∏∏´ÕÓ§»§∑§∆§ø°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/09 X-26 | |
|
°˙ 22:08
∫£∆¸§Œ§™«„ ™ (F.S.S. XII°¢≤ʧȧ¨ŒŸøÕ§Œ»»∫·°¢œª»÷ÃЧŒæÆÃΪ“)
 F.S.S XII  ≤ʧȧ¨ŒŸøÕ§Œ»»∫·  œª»÷ÃЧŒæÆÃΪ“ §»§§§¶§≥§»§«Ãµªˆ12¥¨§Ú ð∏Ó°£ §¢§»°¢§™¡¶§·§Œ√™§«ÃЧÀªþ§Þ§√§ø∆Û∫˝§‚∞ÏΩÔ§À°£ µÐ…Ù§þ§Ê§≠¿Ë¿∏§ŒÀЧœΩÈπÿ∆˛°£Õß√£§´§È¡¶§·§È§Ï§∆§ø§Œ§«≥⁄§∑§þ°£ (∞ ≤º°¢¡¥§∆•¢•Þ•æ•Û•¢•Ω•∑•®•§•»•Í•Û•Ø)
F.S.S.∆…§ý§Œ§œÃ¿∆¸∞ πþ§À§π§Î§ƒ§‚§Í§¿§√§ø§Œ§À°ƒ §¡§Á§√§»§¿§±∆…§‚§¶§´§»≥´§§§ø§œ§∫§ §Œ§À°ƒ ¡¥…Ù∆…§Û§«§∑§Þ§√§ø°ƒ ≈ˆ¡≥°¢∫£∆¸§Œ∫Ó∂»ø ƒΩ•º•Ì°ƒ orz æ«Æ§¨¬≠§Í§Þ§ª§Û§Õ°¢æ«Æ§¨ §¢§»°¢º´¿©ø¥ §¢°¢µªΩ—§»√Œº±§‚°ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 13:25
§¡§Á§√§»§‰§Îµ§…¸≥Ë
FT§Œ»Ø…Ω§Ú¥—§∆°¢§¡§Á§√§»§‰§Îµ§§¨∏∫¬ý§∑§∆§Þ§∑§ø§¨°ƒ Slashdot.jp§Œµ≠ªˆ°÷•‚•Û•Ì°º•¶•©°º•Ø§Ú§π§Î•Ì•Ð•√•»°◊ §ÿ§Œ •≥•·•Û•»#917841§´§È•Í•Û•Ø§µ§Ï§∆§øFT§Œ∆∞≤˧ڥ—§∆°¢§¡§Á§√§»§‰§Îµ§…¸≥Ë°£ §≥§Œ¥∞¿Æ≈Ÿ§«§¢§Œ¬Á§≠§µ§À§Þ§»§·§Î§Œ§œ§π§¥§§§±§…°ƒ ª‰§¨Õþ§∑§§§Œ§œ§≥§Ï§∏§„§ §§°£ ª‰§œª‰§¨Õþ§∑§§§‚§Œ§ÚÃЪÿ§∑§∆¥Ëƒ•§Ì§¶°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/08 X-27 | |
|
°˙ 21:19
F.S.S. 12¥¨§œ¥˚§À≈π∆¨§À§¢§Î§È§∑§§
°÷4/10»Ø«‰°◊§√§∆§§§¶§Œ§Ú¡«ƒæ§Àºı§±ºË§√§∆§§§øª‰°£ §Þ°¢§Þ§¢°¢∂‚ÕÀ∆¸§À«„§√§∆§ø§ÈΩµÀˆ§¨¡¥…Ùõ§Ø§ §√§∆§ø§¿§Ì§¶§´§ÈŒ…§´§√§ø§Œ§´§‚°£ °ƒ§«§‚°¢ŒØ§√§∆§§§øø∑ π(∞Ï•ˆ∑Ó ¨)§Ú∆…§Û§«§§§ø§Œ§«£µª˛¥÷∂·§Øõ¬Ã§À§∑§∆§∑§Þ§§§Þ§∑§ø°£ FT §‚ ITR §‚ø∑ πµ≠ªˆ§ÀΩ–§∆§Þ§∑§ø§Õ°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 3:18
ÀË∆¸§≥§ƒ§≥§ƒ ( ‚§±§ §§§ §¢°ƒ)
°÷ ‚§±§ §§°◊§»§§§¶§´≤ø§»∏¿§¶§´°ƒ ƒ¥ª“§¨§§§§§»§≠§œ•µ•Ø•µ•Ø ‚§Ø§Œ§À°ƒ ∫∆∏Ω¿≠§¨∞≠§§§Œ§œ•µ°º•Ð§¨«Æ•¿•Ï§π§Î§´§È§ §Û§¿§Ì§¶§´°£ æ∆§§§¡§„§√§ø§Í§œ§∑§∆§ §§§±§…°¢¬≠•‘•√•¡º¥•µ°º•Ð§œ§…§Ï§‚•¨•Í•¨•Í≤ª§Ú§ø§∆§Î§Ë§¶§À§ §√§¡§„§§§Þ§∑§ø°£ §Ω§Ì§Ω§Ì ¨≤Ú¿∞»˜§∑§ §≠§„§´§‚°£ --- §≥§Ω§≥§Ω√ƒ§Œ£¥•≥•Þ•«•”•Â°º (≥®§¨§´§Ô§§§π§Æ§∆√ا¿§´§Ô§´§È§ §§°ƒ§´§‚) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/07 X-28 | |
|
°˙ 21:31
(URL•·•‚)∫Ÿø»§«§∑§ §‰§´Ω˜¿≠•Ì•Ð•√•»(•Ì•Ð•¨•Ï°º•∏)
ª∞∑Ó≈∆§Œ•Ì•Ð•√•»°¶•’•°•Û.§Õ§√§»°£ §Œ∆¸µ≠(2006.04.07)§´§È •Ì•Ð•¨•Ï°º•∏§Œπ‚∂∂§µ§Û§¨°¢ø∑§∑§§•Ì•Ð•√•»§Ú»Ø…Ω§∑§Þ§∑§ø°£ ª≤πհߕ̕Е¨•Ï°º•∏ FT(•®•’•∆•£) ∑»¬”∏˛§±•µ•§•»§À§œ§‚§√§»æ Û§¨§¢§Î°ƒ§È§∑§§§«§π°£ ª‰§À§œ∏´§È§Ï§ §§§±§…°£ Ω˜§Œª“∑ø•Ì•Ð§»§§§§°¢•µ°º•Ð•≥•Û•»•Ì°º•È§»§§§§°¢§…§Û§…§Ûº˛§Í§´§È√Ÿ§Ï§∆§§§Ø§Œ§¨≤˘§∑§§°£ §´§»§§§√§∆Ω–ÕËπÁ§§§Ú«„§¶µ§§À§œ§ §Ï§ §§ª‰°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/06 X-29 | |
|
°˙ 2:48
(∫Ó∂»•·•‚)∆∞∫Ó√ʧŒ•–•√•∆•Í°º≈≈∞µ (§Ω§Œ4)
≈≈∏ª§Ú•¢•Î•§•Û•≥§´§È•–•√•∆•Í°º§À —§®§∆°¢060323-1.1.ru / -1.2.lu/ru §Œ•π•Ø•Í•◊•»§Úº¬π‘°£ ∞Ï ‚ÃЧ¨§¡§Á§√§»…‘∞¬ƒÍ§¿§±§…∆Û ‚ÃÐ∞ πþ§œ§ §Û§»§´ ‚§±§Î§þ§ø§§°£ Toshiba 2300mAh•—•√•Ø (Ωº≈≈∏ª»§Ô§ §§§Þ§Þ°¢3∆¸ ¸√÷) õ…È≤Ÿ(PIC/L-Card§Œ§þ) : 7.44V ‚π‘Ωý»˜ª—¿™(wh.dat L=130) : 6.53V ∫£≤Û§‚∑“§§§¿ƒæ∏§œ ‚π‘Ωý»˜ª—¿™§« 5.8V§Ø§È§§§∑§´Ãµ§´§√§ø°£ ∞Ï≈Ÿ≈ð§Ï§Ω§¶§À§ §√§∆≤·…È≤Ÿ§À§ §√§ø§È°¢§Ω§Œ∏ 6.5V§À§ §√§ø§Ë§¶§ °ƒ --- •‚°º•∑•Á•Ûƒ¥¿∞§œ¿Ë¡˜§Í§À§∑§∆•ª•Û•µ°º∑œ§Œ∫Ó∂»§À∞Ðπ‘§∑§Ë§¶§´§ °£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 1:58
ÀË∆¸§≥§ƒ§≥§ƒ(§‰§Ï§–§‰§Î§€§…∞≠≤Ω§π§Î°ƒ)
∫Ú∆¸∫Ó§√§ø•‚°º•∑•Á•Û§œ•¿•·•¿•·°£ £≤∆¸Ãµ¬Ã§À§∑§∆§∑§Þ§§§Þ§∑§ø°£ •¢•Î•§•Û•≥§ŒΩ–Œœ§Ú 6.2V§ÀÕÓ§»§∑§∆°¢060323-1.2.lu / ru §Ú∆∞§´§∑§ø§È…‘ª◊µƒ§»∞¬ƒÍ§∑§∆ ‚§§§¡§„§¶§∑°ƒ°£ (060323-1.1 §œ¬≠æ§≤ƒæ¡∞§Œ•»•Î•Ø ‰¿µ§¨»¥§±§∆§Îµ§§¨§π§Î) --- …·ƒÃ§À ‚§±§Î§Ë§¶§À§ §√§ø§È∆∞≤Ë∏¯≥´§∑§ø§§§Œ§À§ °ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/05 X-30 | |
|
°˙ 22:21
•Ì•Ð•Ô•Û•Ô°º•Î•…•´•√•◊2006
∫«∏§Œ∂•µª§œ°¢•Í•œ°º•µ•Î§«§Œªˆ∏Œ§Ú∆ߧާ®§∆¡¥ÃçÀ•Þ•√•»§¨…þ§´§Ï§∆§§§ø°ƒ§»ª◊§§§ø§§°ƒ§ §°°£ œø≤˧∑§ø§±§… ð¬∏§π§Î§´§…§¶§´»˘Ãا«§π°£ §¢°¢∫«∏§Œ§€§¶§«∆˛§√§øCM§ÀASIMO§¨Ω–§∆§ø§´§È°¢§Ω§≥§¿§±§œ≥Œº¬§À ð¬∏°£ ----- §€§Û§»§À§™»Ë§Ï§µ§Þ§«§∑§ø °‰ ª≤≤√§∑§ø ˝°π [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 3:00
ÀË∆¸§≥§ƒ§≥§ƒ (•‚°º•∑•Á•Û•∏•ß•Õ•Ï°º•ø≤˛Œ…√Ê)
ªƒ§Í£±•ˆ∑Ó¿⁄§Í§Þ§∑§ø°£ ∫£§Þ§«∞Ï ‚ÃЧŒÕ∑µ”µ∞∆ª¿∏¿Æ§∑§´§«§≠§ §´§√§ø•◊•Ì•∞•È•ý§Ú≤˛Œ…§∑§∆∆Û ‚ÃÐ∞ πþ§ŒÕ∑µ”∑◊ªª§¨§«§≠§Î§Ë§¶§ÀΩ§¿µ°£ (§≥§Ï§Þ§«∆Û ‚ÃÐ∞ πþ§ŒÕ∑µ”§œ≈¨≈ˆ§À ‰¥÷§∑§∆∫Ó§√§∆§Þ§∑§ø) §≥§Ï§«°¢ ƒæŒ© ¢™ ∞Ï ‚ÃÐ ¢™ ƒ‰ªþ ƒæŒ© ¢™ ∞Ï ‚ÃÐ ¢™ ∆Û ‚ÃÐ ¢™ ƒ‰ªþ §»§§§¶•‚°º•∑•Á•Û§¨∫Ó§Ï§Þ§π°£ ‚π‘æı¬÷ ¢™ ¬≠§Ú¬∑§®§∆ƒæŒ© §Œ¿∏¿Æ§œ§Þ§¿°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/03 X-32 | |
|
°˙ 22:49
ÀË∆¸§≥§ƒ§≥§ƒ
§«§≠§ §§§Ë°º°º°º §Ô°º°º§Û (T-T §¿§√§∆°¢§≥§Œª˛¥÷§À§Þ§¿≤Òº“§À§§§Î§Û§¿§‚§Û°£ ∞Ï∆¸√Ê•«•£•π•◊•Ï•§∏´§∆§ø§Œ§«ÃЧ¨ƒÀ§§§«§π°£ ±ø≈æ§∑§∆µ¢§Ï§Î§´§ °ƒ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/02 X-33 | |
|
°˙ 22:44
RoboCountry IV ª≤≤√•Ì•Ð•⁄°º•∏
•¢•Þ•∆•È•π§¡§„§Û§Œ≤Ë¡¸§¨§¢§Þ§Í§À§´§Ô§§§§§Œ§«•¿•¶•Û•Ì°º•…§∑§∆§∑§Þ§§§Þ§∑§ø°£ •¥°º•Ï•ý§Ø§Û§‚§‚§√§»≥ π•§Ë§Ø§∑§∆§¢§≤§ø§§°£ (∞∆§œ§¢§Î§Œ§¿§±§…π©∫Ó«ΩŒœ§¨°ƒ) --- RoboCountry IV§ŒURL§œ http://www6.ocn.ne.jp/~robotics/11.html §«§π°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 15:52
¥ÿ≈Ï¡»Œ˝Ω¨≤Ò#7
∑Î∂…°¢Ω–§´§±§Î§Œ§¨18:00§À§ §√§∆§∑§Þ§√§ø§Œ§«°¢•¥°º•Ï•ý§Ø§Û§œœ¢§Ï§∆π‘§´§ §§§≥§»§À°£(Œ˝Ω¨≤Ò§œ 21:00§Þ§«) ∞∆§ŒƒÍ°¢≤Òæϧ«≥ߧ´§È°÷•¥°º•Ï•ý§Ø§Û§œ°©°©°◊§» π§´§Ï§∆§∑§Þ§§§Þ§∑§ø°£ §Û°º°¢∫£§Œæı¬÷§¿§»°÷§¡§Á§¶§…§§§§•–•√•∆•Í°º≈≈∞µ§Œª˛§∑§´ ‚§±§ §§°◊§Œ§«°ƒ (¥¿ ∫Ú∆¸°¢œ√§∑§∆§§§ø °÷ ‚§±§ §§•Ì•Ð•√•»§Ú∫Ó§√§∆§§§Î•µ•§•»§œ•¢•Û•∆• §Œ•¡•ß•√•Ø§´§È≥∞§∑§Þ§π°◊§œ §‚§¡§Ì§ÛªÕ∑Ó«œºØ•Õ•ø§«§π°£§œ§§°£ §Ω§Û§ §≥§»∏¿§√§ø§È°¢º´ ¨§Œ•µ•§•»§Ú≥∞§µ§ §≠§„§§§±§ §§§∏§„§ §§§«§π§´°£ --- ∫£∆¸°¢µØ§≠§ø§È 15:30 §«§∑§ø°£(11:00∫¢§Àø∑ π§ŒΩ∏∂‚§À¬–±˛§∑§ø≥–§®§¨§¢§Î§Û§¿§±§…°ƒ) 16:00§´§È•¢°º•Î•∆•£§µ§Û§«°÷•Þ•Œ•§§Œ§¢§Û§ §≥§»§‰§≥§Û§ §≥§»æ“≤°◊§¨§¢§Î§Œ§«π‘§Ø§ƒ§‚§Í§À§ §√§∆§ø§Œ§À°ƒ (≥∞¡ı§œ∑˘§§§¿§±§…∆‚…Ù§À§œ∂Ω㧨§¢§Í§Þ§π) [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
| 2006/04/01 X-34 | |
|
°˙ 15:01
•–•√•∆•Í°º≈≈∞µ¬¨ƒÍµ°«Ω∫Ó¿Æ√Ê
µ°«Ω§»§§§¶§´≤Ûœ©§»§§§¶§´°ƒ √±§À•–•√•∆•Í°º§´§È§Œ«€¿˛§ÚƒÒπ≥§« ¨∞µ§π§Î§¿§±°£ §»§Í§¢§®§∫…Ù… »¢§À§¢§√§ø 470K¶∏§ŒƒÒπ≥3§ƒ§« 1/3 §Œ≈≈∞µ§À§∑§Ë§¶§»§∑§∆§Î§Û§¿§±§…°¢L-Card§Œ•¢• •Ì•∞∆˛Œœ§√§∆¬¨ƒÍ¬–æ𧌕§•Û•‘°º•¿•Û•π¥ÿ∑∏§ §§§Œ§´§ °© --- §Ω§Û§ §≥§»§∑§∆§∆Œ˝Ω¨≤Ò§À¥÷§ÀπÁ§¶§Œ°© [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 2:17
(∫Ó∂»•·•‚)∆∞∫Ó√ʧŒ•–•√•∆•Í°º≈≈∞µ (§Ω§Œ3)
¿µ≥Œ§À§œ•–•√•∆•Í°º§∏§„§ §Ø§∆•¢•Î•§•Û•≥§Œ≈≈∏ª§¿§±§…°ƒ •◊•Í•ª•√•»§« 7.0V§ÀπÁ§Ô§ª§∆§¢§Î§Œ§À°¢ ‚π‘Ωý»˜ª—¿™§À§π§Î§» 6.8V 30AŒÆ§ª§Î§œ§∫§ §Œ§À3A§«≈≈∞µπþ≤º°© §»§´ª◊§√§∆°¢≈≈∏ª§Œ•ø°º•þ• •Î§«¬¨ƒÍ§π§Î§»§‰§√§—§Í 7.0V ≈≈∏ª§´§È•¥°º•Ï•ý§Ø§Û§Þ§«§Œ2m§Œ•±°º•÷•Î§«≈≈∞µπþ≤º§∑§∆§§§ÎÃœÕÕ°£ •¢•Î•§•Û•≥ DM-330MV (•◊•Í•ª•√•»≈≈∞µ 7.00V) õ…È≤Ÿ(PIC/L-Card§Œ§þ) : 7.00V ΩýƒæŒ©ª—¿™(h.dat L=140) : 6.85V ‚π‘Ωý»˜ª—¿™(wh.dat L=130) : 6.85V [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |
|
°˙ 0:19
°÷±¨∑Ó°◊ ∫˘§¨À˛≥´§Œ√Ê°¢§≥§Œ¥®§µ§œ≤ø
ƒÃ∂–•Î°º•»±Ë§§§Œ∫˘§œÀ˛≥´§«§Ω§Ì§Ω§Ìº„Õ’§ŒŒ–§¨§¡§È§€§È°£ § §Œ§À§ §Œ§À°¢§·§√§¡§„¥®§§§Œ§œ§ §º°£ ∆¸ÕÀ∆¸§À¬øÀý¿ÓƒÈÀ…§Œ∫˘§ÚºÃøø§Àª£§Ì§¶§»ª◊§√§∆§§§ø§Œ§À°¢±´§þ§ø§§°£ [°˘•≥•·•Û•»] [¢§¿Ë∆¨§ÿ] | |



2021«Ø:
1Q
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø