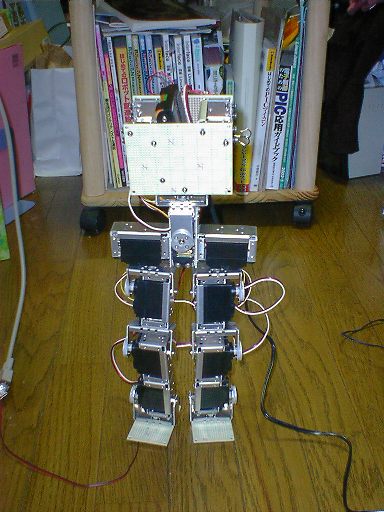
上半身を左右にゆらす反動で足が浮くことを確認中…
ゆらした瞬間に反作用で浮く足よりも
ゆらし終わった直後に、上半身に残った加速で足が浮くほうが大きいみたい。
もうちょっと細かい加減速をすると変わってくるのかな…
ちなみに、この子はプロトタイプの「ごーれむくん零号」
( 第2回大会用だったので、このままでは横歩きができません )
(QuickTime 8.1MB)
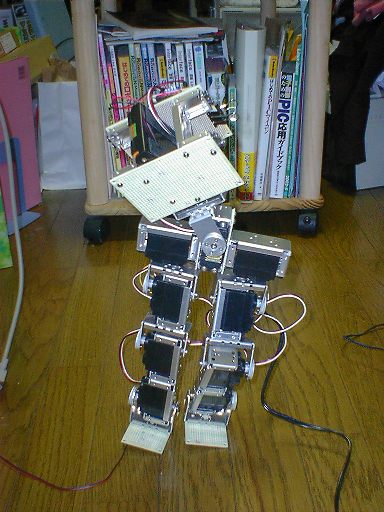
苦節6ヶ月…ようやく屈伸できました♪
と言っても、まだ下半身だけだし、股関節の自由度は設計図よりも1つ少ない。
まだ、ロボット自身には CPUボードが載ってないから、サーボ制御用のPIC とパソコンを直結して、ターミナルソフトからサーボ制御情報を送ってるだけ…
さらに、PICのプログラムがしょぼいので、サーボ角の指定は 12度きざみ。
まだまだ、先が長そう…
