開発日誌(2004 4Q)
2021年:
1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2004/12/29 X-79
|
★
誕生日なのに雪積もってますよ…
| 自分のバースデープレゼント(?)を買いに行こうと思ってたのに、雪じゃないですかっ! しかも、絶賛積もり中… お日さま見えないからどんどん積もっちゃうんだろうなぁ… 今年の貯金額が目標を超えたら、そのお金でバースデープレゼントを… …と思ってたんだけど、結局目標額に3万円不足。 (先日のロボ部品とTVキャプチャカード購入が余計でした) 目標を5万円下げて、差額の2万円で新しい服を買うことにします。 ドメインの取得は年明けに先送り。 ドールを買えるのはいつになるんだろう… ☆[コメント]
2004/12/27 X-81
|
★
昨日のお買物(ホーン交換、ロングケースビス、フリクションスペーサ)
| 忘年会の時にサーボホーンを買ったのだけど、 プラホーンにネジを入れるのが下手なので、アルミサーボホーン(ガンメタリック)に交換してもらうことに。 ついでに、買い忘れていたロングケースビス(20本入り)と、フリクションスペーサ(4個入り)も購入。 …って良く考えたら新年会の時でも良かったんじゃ… ☆[コメント]
2004/12/23 X-85
|
★
(URLメモ) 韓国の等身大二足歩行ロボット
| Robot-Fanの=伝言板= の106番の投稿 経由 中央日報 から 【写真】韓国のアシモ「HUBO」 「韓国内で両足で歩く歩行ロボットが開発されたのは初めて。」 って…ROBO-ONE Korea に出てるロボは無視? (笑 =伝言板=の106番の投稿にある他のリンク ・韓国型ヒューマンロボット「ヒューボ」誕生 (朝鮮日報) ・歩行動画 (wmv) (出処不明) ・記者会見?動画(wmv) (president.go.kr) 最後の動画で握手してるのって大統領? 会見では「ケンブリッジ大学がふがほげ」って喋ってるように聞こえました。 共同開発なのかな? --- …あまり関係ないけど… ちまたの掲示板CGIって、個々の投稿をURLで特定できるのって少ないですね。 みんな不便に思わないのかな… ☆[コメント]
2004/12/19 X-89
|
★
(メモ)USB経由でサーボ制御したいっ!
| という話を昨晩の忘年会二次会で聞いたので 「こんな風にすればできそう」っていうののメモ 案1) 既存のサーボ制御基板 + USBシリアル変換ボード パソコン側からはシリアルインターフェースで操作。 (USBシリアル変換ケーブルの中身みたいなものね) ストロベリーリナックス のUSB←→シリアル変換モジュール (探してみた感じではこれが一番安い) を買って 中村博士のHSWBとかJinさんのE001とかRCB-1等のRS232C経由で動くサーボ制御ボードにこれを繋げばすぐにUSBインターフェース完成。 パソコン側からは普通のシリアルインターフェースに見えるから、アプリケーションもそのまま動くはず。 案2-1) USBシリアル変換チップ + ワンチップマイコン + サーボ制御プログラム パソコン側からはUSB汎用ドライバ経由で操作 変換チップは
これに PIC, AVR, H8とかを繋いでサーボを制御 (マイコンの pin数を選べば 2〜32サーボくらいまで) 案2-2) USBチップの半田付けや基板製作が大変なら、ストロベリーリナックスのUSBシリアル変換モジュールにマイコンを載せてしまいましょう。 案3) EZ-USBのような、USBインターフェース付きのマイコンにサーボ制御もさせてしまう。 「ような…」と書いたけど EZ-USBしか知りません。 EZ-USBはUSBコントローラにインテル8051互換CPUが入っています。 8051の開発にはgccを使えないようですが、SDCCというGPLのコンパイラとKEIL Cという製品の評価版が2Kbyte(オブジェクトサイズ?)までの開発に利用できるようです。 ボードとしての製品だと が安そう。 パソコン側からコントローラへプログラムを送りつけて実行できるというのがいいかも。 問題は 8051 のプログラミングでしょうか。 案1から案3になるにつれて難易度が上がるかと思います。 案2-2でよければ引き受けますよー (それなら他にもできる人一杯いるって…) --- イカロスさんがMINI EZ-USBを購入しているみたいですね。 はっ、まさか「ホイホイさん」製作用? ☆[コメント]
★
昨日のお買物 (PIC12F675/16F648, SC-EZA)
| 久しぶりに秋葉へ行くのだから、必要なもの買い込まないと… と思って昼ごろに出かけるつもりが、秋葉に着いたのは 18:00過ぎ (汗 「18:00閉店だっけ…」と思いつつ秋月へ まだ開いてました。 (18:00閉店は日曜だけ) マイコン単体を買ったことなかったので、店員さんに型番を伝えて教えてもらいました。 買ったのは
これで、MSC 3.0 と ICSもどきをブレッドボード上でテストできるようになります。 急いでたのでレシートもらい忘れちゃった… っていうか、レギュレータ用のコンデンサ買い忘れてるじゃん! (0.1μFのコンデンサ3つ並べるか…) --- その後、みんなが集まってるロボット王国へ 買うかどうか迷っていたけど SC-EZAと、それに必要なものをとりあえずサーボ6個分購入。 やっぱり、ケチケチせずにアルミホーン買えば良かったかな… (プラホーンにネジ止めするの苦手) あーーっ… ロングケースビスとフリクションスペーサ買うの忘れた。(T-T ☆[コメント]
★
ロボット好き共の忘年会
| 昨晩は秋葉原某所で「ロボット好き共の忘年会」でした。 当初は「10人で集まって呑むのかな?」って思っていたら、最終的には参加者30人に… (お店が広くて良かったですね > 幹事さん) 宴会途中でお店の中に特設リングを作ってバトル開始! 今回は世界初(?)のロボレフリー (生茶パンダサンタバージョン) 勝者は…だれだっけ? その後二次会でもワイワイガヤガヤと騒いでいて、お店から出たときには帰りの電車はとっくに終了。 山手線の最終で品川まで行って、そこからはタクシーでした。 来年こそは予選に出られるように頑張るぞ…っと --- 宴会の詳細は幹事さんが日記に書いてくれると思います。 (うちにはパンダレフリーの写真しかありません) ☆[コメント]
|  世界初(?)ロボレフリー
2004/12/15 X-93
|
★
MPLAB Ver 7.0
| MPLAB Ver 7.0が出ていたので入れてみました。 Ver 6.6 では BreakPointダイアログが使いにくくなってた(BreakPointをラベルで選択できなくなった)けど、Ver 7.0 ではどうかな… アーカイブは大きいんだけど、必要なのは Setup type selected: Custom Components selected: 8 bit MCUs MPASM Suite MPLAB IDE MPLAB SIM これだけ。 うちには ICE も PICSTARTもないから。 体調がいいうちに作業を進めなきゃ… --- 隊長からは「まずは、何かしら使用して動かすこともいい経験になるはず」とのありがたい助言をいただいているけれど、もう少し自分の技術だけで頑張りたい。 開発に三年もかかってるうちに、ずっと性能がいい製品が出てきてしまったけど、それでも自分で作ってみたいのです。 ☆[コメント]
|  MSC 3.0 サーボ制御周期のフローチャート
★
ICSもどき とか RS422 とか
| 「こんなことしてる場合では…」と思いつつ横道に… Google検索 「RS422 ワンチップ ドライバ」 どういうキーワードで探せばいいか判らなかったんだけど、偶然気づいた。 うーん…使い方が良く判らないなぁ… 導入できるのはずっと先になりそうですね。 とりあえず、ICSもどきを作ろっか。 普通のサーボに取り付ければ、あなたのサーボもICS対応に早変りっ! アナログサーボでトルク切替えとポジションキャプチャができるようになっちゃいます。 今ならおまけにオペアンプもサービス! とか… 一個500円とかで売ったらKOさんに怒られるかな? ほら、そんなことしている間に、もうあと3ヶ月! --- なんて書くと、Jinさんが先に開発して発売してしまう予感。 ☆[コメント]
2004/12/12 X-96
|
★
第7回ROBO-ONE注目ビジュアル系機体
| (スラッシュドットの日記を読んでいる人向けです) 次回大会のゲスト審査員は大河原邦男さんを呼ぶ予定とか… それがきっかけなのか、それとも第7回ともなると常連さんは余裕があるのか、 ビジュアルにこだわったロボがちらほら。
でも、しかし…そんなのはまだ序の口です 一番の注目機体は たぬたぬGクリスマスバージョン ! 良すぎです。 言葉が見つかりません。 私も頑張らなきゃ。 ☆[コメント]
2004/12/10 X-98
|
★
MSCロジック再変更
| 前の日記のシーケンス図を見ていたら、全然違うロジックでもっとPWM分解能をあげられることを発見。 しかも、そのロジックの方が今のプログラムよりもずっと簡潔… …ていうか、3年間それに気づかなかった自分って何。 シリアル通信のデータ受信間隔ってPWMの分解能に比べたらめちゃめちゃ長いのね… (新ロジックのフローチャートとかはまたそのうち) ☆[コメント]
★
選択と集中
| ONOの電脳壁新聞を見ていると、他の人達は順調に作業が進んでるみたい。 私は相変わらずサーボコントローラのロジック改良中… モーションエディタ/コントローラもセンサ実装も逆運動学プログラムもできてない… 残り三ヶ月で間に合うの!? ううう… とりあえずJinさんのE001基板 や KOのロボット用コントロールボード:RCB-1を買ってしまって 他のところに注力すべきなのかも… ああ…でも全部を自分でやりたいぃぃぃ… ☆[コメント]
| 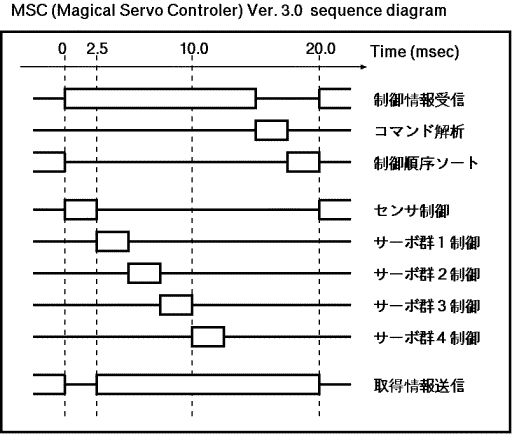 MSC 3.0 処理シーケンス概略
2004/12/08 X-100
|
★
(メモ) 脳波でロボットを動かす (Interface「ロボット探訪」)
| Interface 2005年1月号から「ロボット探訪」っていう連載が始まってます。 で、その第一回が 脳波でロボットを動かすという試み へぇ…と思って読みはじめたら いきなり「はじめに」に 「ROBO-ONEのような競技大会に出場できるロボットの脳動制御システム」とか出てる… あー、「脳波での車いす制御」ってどこかで見たような… と、さらに読み進むと FantomRing製(?)のロボが… どこまで動かせるんだろう… 著者の田中一男さんは電通大の先生です。 夏に電通大に遊びに行ったときに見たかったな。 …もしかして次回大会くらいに出場?? 参考: Interfaceホームページ (CQ出版社) 脳波で車いす操作、電通大がシステム試作 (日本工業新聞 2003/12/5) 電気通信大学 田中研究室 --- Googleで検索中に、懐かしい名前を見てしまいました。 今はそんな研究もやってるんですね… ☆[コメント]
(リンク先はInterfaceのHP) |  2005年1月号発売中 特別号定価 980円
2004/12/06 X- |
★
X-day修正 & 足裏規定変更
| ROBO-ONE公式ページ で「開催日決定&競技規定変更」のアナウンスがありました。 予選:3/19、決勝:3/20 足裏サイズ: 前後60%、左右40% 友達の結婚式と重ならなくて良かったです。 ドレス着て予選に出ることになるのかと思ってました。 (…普通、式場で着替えるって) これでまた残り3ヶ月に戻りました。 頑張らなきゃ。 足裏はどのみち15cm超えてるので、角を5mm程切ります。 ☆[コメント]
2004/12/04 X-83
|
★
(URLメモ) トヨタの新型ロボット
| ONOの電脳壁新聞(2004/12/03) 経由 fuRo ---未来ロボット技術研究センター 経由 Robot.Mとの優雅な平日 経由 CNET Japanから (経由長すぎるよ…) フォトレポート:トヨタが描く、新しい自動車のカタチ i-foot歩行動画(52Kbps)のURLは http://www.japan.cnet.com/2004/sharedmedia/photo/041203_toyota/MVI_1926_52k.wmv あれ?前に発表したスチュワートプラットフォーム型の歩行椅子はどうなったんでしょう… あれとは別物なのかな?それともあっちはポシャった? ジョイスティック操作で動くなんて楽しそう。 ペダルを踏むとジャンプしたりしますか? (違 でも…コクピット回りが取り囲まれてるから転びそうになったとき逃げられないような… ちょっとでいいから乗ってみたいです。 「操縦者してるのはこうじさん」と言われるとそんな気もするけど…そうなの? --- WMVが JavaScriptでリンクされてると見るのが難しい… xine を呼び出すような仕掛けつくれないかな… --- 2004/12/04 17:23 追記 前の (ITmedia) も良く見たら普通の脚でした。 スチュワートプラットフォームと見まちがえていたようです。 ☆[コメント] | ||||||||||
| 2004/11/30 X-87 | |||
|
★
(URLメモ) ジャイロ関連
まだまだジャイロに手が出せる状態じゃないのですが… 参考になりそうなページをメモ。 (実は去年の冬に2つ購入済。ええ、もちろん全く活用されてません:泣)
ライブドアほんとにダメですね… (買収されたサービスはダメになるという噂は本当だったのね…) 残り三ヶ月を切りました。本気でやらないとまた棄権になってしまいそうです。 ☆[コメント] | |||
| 2004/11/24 X-93 | |||
|
★
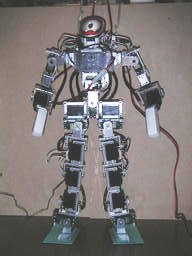
現在 2696g
現状のゴーレムくんの体重を計ってみました。 (右の写真、ゴーレムくんは凄い姿勢で二つの秤に乗ってます) 850g + 1846g = 2696g 重さだけなら他にもこれくらいの体重のロボはいると思うのですが… ゴーレムくんの場合は、上半身の重さが体重の半分以上(2/3くらい?)を占めているところに問題が… ちょっと傾いただけでも大きなトルクがひざや足首のサーボにかかります。 しかも、無線ユニットとジャイロ、加速度センサを載せると、あと150gくらい増えそう… 上半身のServoCreationを削って軽量化しないと… ☆[コメント] |

ゴーレムくんの体重測定 | ||
|
★
昨日のお買物(ソルボセイン、電子はかり)
映画とコンサートのために渋谷へ行ったので、ついでに東急ハンズでお買物。 買ったのは ・ソルボセイン はじめロボットの坂本さんが足裏の反発低減のために使っているらしい ・電子はかり これまでは 1kgまでしか計れないキッチンスケールだったので、2kgまで計れるのを買いました。 ☆[コメント] |

電子はかりとソルボセイン | ||
| 2004/11/22 X-95 | |||
|
★
進捗 MSCロジック変更作業中
相変わらず MSC : Magical Servo Controller (某社のCコンパイラではない)のロジック変更作業中。 タイマー割り込みで動いていた処理を、フリーランタイマーに書き直す作業がようやく終了。 これで、レジスタ退避のための20ステップが減りました。 次は、PWMピーク幅の順にソートするルーチンの作成。 ROBOCON Magazine No.11 で紹介された青山学院大学の Mk.5 (morphの前身になるのかな?)のサーボ制御プログラム Cherry の実装を真似しようとしています。 以前、もやねさん(メインページお休み中)が同じ手法で 16サーボ同時制御+I2C通信のプログラムを作って公開されていました。 MSCは 24サーボ同時制御+ジャイロ読み取り+ポジションキャプチャ+RS232C通信になる予定。 もっとも今の設計だと制御角分解能は 1degくらい…。 (ダメじゃん) RS232Cのフロー制御を入れるかどうかで悩み中です。 あ、マイコンは PIC16F877 一個(秋月のPICモジュール)です。 ☆[コメント] | |||
| 2004/11/19 X-98 | |||
|
★
ROBO-ONEアンテナの方向性
「あんた、そんなことで悩んでる場合ちゃうやろ」って感じですが… アンテナを動かし始めた当初は、ゴーレムくんを作る上で参考になるサイト(特に参加者の製作日記)を追っかけるのが目的でした。 まだ第二回ROBO-ONEが終わった頃で、テクニカルカンファレンスも始まっておらず、サーボの改造方法や制御方法、歩行技術に関するトピックは参加者がWebで公開しているものが頼りだったからです。 各参加者のWeb更新をできるかぎり追いかけて自分の技術向上に結びつけたいと思いつつ、Web更新を追いかけていると開発作業が進まないというジレンマを解決するための手段がROBO-ONEアンテナでした。 …が、現在では初期開発時の技術トピックは各参加者の過去日記に埋もれてしまったので、ROBO-ONEアンテナが技術的なトレンドを追っているかどうかは微妙です。 技術的な情報を追いかけるというよりも、ROBO-ONE参加者のコミュニティ動向を追いかけてるような気がします。 新しい参加者の開発日誌などで過去の技術トピックが参照されたりするので、良いところを見付けたら追加登録するようにしているのですけど… このまま登録数を増やしていくと「ロボあんてな」との違いがなくなっちゃいそうです。 ROBO-ONEアンテナはこのままの拡大路線ですすめて、技術トレンドを追うページを別に作ろうかな… テクニカルカンファレンスの資料を技術別に分類しなおすだけでも、結構使えるページができそうに思うのですけど… …って、それはONOさんとこの「歩行ロボットリンク集」と同じか… --- あれ?前にも同じようなことを書いた気がするけど…気のせい? ☆[コメント] | |||
| 2004/11/16 X-101 | |||
|
★
第7回大会に向けて
ようやく足踏み(もどき)まで辿り着きましたが… 今の構成のままでは歩けるかどうか怪しいです。 ほりさんからのコメントにあるように、 脚を短くすればいいんですが… 菅原さん他数名の方から「ジャイロ入れれば歩けるよ」と助言いただいたので 「ジャイロさえ入れればきっと歩けるさっ!」 という方針でいきたいと思います。(大丈夫? まず、サーボ制御用PICでジャイロの値を読めるようにしないと。 今のプログラムでは他のことをやる暇がないので、ロジック全面改修。 ☆[コメント] | |||
|
★
これからも「人形つかい」でよろしくです
もうひとりの「人形つかい」さんからお返事いただきました このままどちらも「人形つかい」という名前のままになりそうです。 もしも、私が RoboCup に参加することになったら「まじかる☆マリオネット」でエントリーかな。 (いつになることやら…) んーー うちのページももう少しかわいくしたいなぁ…(無理 ☆[コメント] | |||
| 2004/11/14 X-103 | |||
|
★
今日のワールドレコーズ
むーやっぱり日テレの電波状況最悪。 垂直同期がずれててキャプチャカードでの録画はボロボロでした。 何とか見られる程度。 戦いのほうは微妙だったかな… 第一回に比べるとロボの歩きが遅かったのでテレビ映像としてはどうかなぁ…と思いました。 ロボ開発者としては技術的なポイント満載で楽しめたのだけど、一般視聴者の反響はどうなんでしょう。 --- 自分のロボは動いてないのに偉そうなこと言ってますね > わたし ☆[コメント] | |||
|
★
日テレの写り悪い− (T-T
ううう…今日は何か日テレの写り最悪 ゴーストが出るだけじゃなくて、たまに垂直同期までずれちゃってる… お昼のワールドレコーズ特番はうまく録画できませんでした。 夜は直ってるといいんだけど… 今日はレフェリー違う人みたいですね。 ☆[コメント] | |||
| 2004/11/12 X-105 | |||
|
★
(録画メモ) 11/14 19:58- 日テレ ワールドレコーズ 「ロボット・バトル世界一決定戦」
ROBO-ONE公式ページから 日本テレビのワールド☆レコーズ(11/14 19:58〜20:54放送)のロボット・バトル世界一決定戦にアリウスとマジンガアが出場します。 Yahoo ! TVから 放送日時 11月14日(日)19:58〜20:54 日本テレビ Gコード(73758714) iEPG予約 ってことで、先々週に予告がでてたやつですね。 日記に「録画メモ」って書いたら録画PCが勝手に予約してくれるといいのに… ☆[コメント] | |||
| 2004/11/11 X-106 | |||
|
★
ラジコンサーボの耳
せっかく軸付きボトムケースを作ってくれるなら、耳を長辺側に移したケースも作って欲しいなぁ… …と、「よっしー隊長の YRS-4649 ICTELYO Blue Version」(2004.11.11の日記) を羨ましく思いながら考えるのでした。 YRS-4649への加工を隊長にお願いしたらいくらかかるのかしら… あ、そうすると SC-EZA for YRS-4649 (?) も必要になっちゃうのか。 ☆[コメント] | |||
|
★
(アンテナ) ライブドア障害中?
aaacafe のサービスが livedoor に移ったみたいですが… 当初、新しいURLに自動転送されてたみたいなのに、表示できなくなっちゃいました。 このために、SISOさんとことSUMYさんとこの更新チェックがおかしくなっています。 御了承ください。 ROBO-ONEアンテナ ☆[コメント] | |||
| 2004/11/08 X-109 | |||
|
★
X-Dayリセット
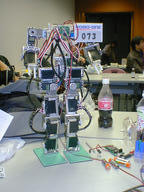
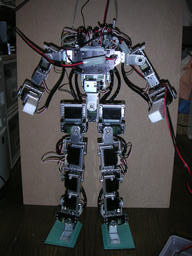
第7回ROBO-ONEは 2/26,27 日本科学未来館。 第1回の会場で吉村さんのR-Blueを見て感動して、 「自分も作って参加するしか!」と思い立ったが吉日からもう3年。 事前審査が無かったおかげでリングに立てた第3回から見ても、すでに2年… うーん… 今度こそ事前審査を通過して予選に参加しないと、出入り禁止になってしまうかも… でもでも、今日会社へ行ってみたら、メールサーバが素敵にトラブっていて、 今月は残業一杯になってしまいそうな予感。 ☆[コメント]
|
ゴーレムくん弍号(開発途上) (2004/10/22 自宅) | ||
| 2004/11/07 X+1 | |||
|
★
第2回 ROBO-ONE Special 終了
今回は奮発して近くのホテルに泊まったので初日の最初から楽しめました。(Stairs見損ねたけど) 総合優勝は Stairs 1位、Dash 2位、Ball 1位、Door 1位 と抜群の機動性を見せつけた Dr-GIYさんの「ヨコヅナグレート不知火」でした。 (ROBO-ONE公式ページにも結果が掲載されてます) あの体重であの機動性を確保しているのは、やっぱりオリジナルモータのおかげなんでしょうか… Dashは 前回のトライアルの時と同じく「コースの板がゆがんでてまっすぐ歩けない!」という状況。 先日のカンファレンスで紹介されていた「デジタルコンパスモジュール」を装備していた人はいなかったようです。 みなさん間に合わなかったのかな… (不知火にデジタルコンパスが付いていれば Dash もトップだったでしょう) 体重を60gの裏技術研究所の「あど・バルーン」は可愛くて子供達に大受け。 手に乗せて遊べるのがいいよね。(2時間くらいでしぼんじゃうそうですが…) --- 結局、今回も棄権となってしまいました。 懇親会では委員長から「飲み会ばっかりじゃなくて競技にも参加してください」と警告が… ('-';; つ、次こそはかならず!! (どっかの悪役みたい) --- 初めて花やしきへ行ったのですが、あまりの濃縮ぶりに感動。 小さい頃に近所のデパートにあった屋上遊園地みたい… (ジェットコースター乗ってみたかったけど、一人で乗るのは恥ずかしかったのでやめましたよ) ☆[コメント] |

ステージ周辺(ごちゃごちゃ…) 
あどバルーン on EAGLE 
夕暮れの花やしき | ||
| 2004/11/06 X-0 | |||
|
★
h ホテル到着 & 悪あがき終了
久しぶりに週末夜の首都高速を走りました。 って、ルート間違えた上に降りるとこ通り過ぎるし… ホテルに着いたのは深夜1時 吉村さんや Dr-GIYさんも同じホテルみたいですが、明日に備えて寝ちゃってるでしょうね。 結局、ゴーレムくんは今回も棄権です。 自律動作開始用のスイッチを付けられませんでした。 (って、それ以前に歩いてないだろ!) なんとか足踏み(かなり微妙)はできるようになったし、体重移動のヒントもつかめたので、次こそは歩けるようになるんじゃないかと思います。 (センサーで補正しないと難しいでしょうけど) ということで、明日は観戦しつつ足踏みを極めようかと… ☆[コメント] | |||
| 2004/11/05 X-0 | |||
|
★
X-13h ようやく片足上げ下げできた…かな
PIC側サーボ制御プログラムは、新たに追加したスイッチ読み込み などの機能を全部コメントアウト。 そして、通信速度だけを 19.2Kbps から 38.4Kbps に変更。 ようやく歩行練習を再開したけどやっぱりうまくいかない… あきらめて、片足を上げるだけの練習に スクリプトを直して、動作をみて、またスクリプトを直して…を2時間程繰り返した結果… 「片足上がりましたっ!」 静安定ではどうしても片足時にフラフラしてダメだったので あきらめて体重移動の反動で足を浮かせるようにしました。 (浮いてるのは 0.5秒ないくらいなんですけど…) これでもしかして歩けるようになる!? …でも、これくらいなら2年前にできてるような… --- でも、どう考えても明日の朝には間に合わない… (T-T 今から支度してホテルへ移動します。 ☆[コメント] | |||
|
★
X-17h 高速化失敗 & ひざサーボ交換
計算上は 57.6Kbps でもバッファリングできるはずなのに… L-Card側のプログラムがいい加減なせいもあって、原因わからず。 さらに、 ひざのサーボが左右で回転角が違ってきてる… やっぱり右ひざサーボはもうダメみたい。 結局左右のひざサーボを 2346 Red に交換。 んーーーーーーーーーー 今回も事前審査通過できない予感。 ☆[コメント] | |||
| 2004/11/04 (ROBO)(URLメモ) 変ドラ第八回「ラジコン大海戦」 | |||
|
★
(URLメモ) 変ドラ第八回「ラジコン大海戦」
まっしもアンテナ経由 陰気な男でいいですか?経由 変ドラ第八回「ラジコン大海戦」〜and Sunekichi the great cousin〜 す、すごい… ドラえもんってこんなストーリーもあったんだ。 え?「これのどこがロボットトピックなんだ?」って? ☆[コメント] | |||
|
★
進捗:PIC側シミュレータデバッグ完了
結局、PIC側プログラムをL-Card側プログラム改良に対応させるだけで休日終了。 今、MPLABシミュレータでのデバッグが完了したとこ。 予定通り動いてくれれば、シンクロ率が3倍になるはずだけど… シンクロさせるモーションが無いんじゃ意味がないよね。('-';; ☆[コメント] | |||
| 2004/11/03 X-2 | |||
|
★
ホテル予約しました
もたもたしてたらシングルルーム埋まっちゃってる…(汗 仕方がないので「ブルーウェーブイン浅草」のダブルの部屋を11/5〜7の連泊で予約。 これで直前までモーション作成してても遅刻しなくてすむ…かな。 あ、泊まるのは一人です。 ☆[コメント] | |||
|
★
もう一人の「人形つかい」さん
KRS-2346ICSの技術情報探してたら見つけてしまいました。 『人形つかい』のロボット雑記 以前、ROBO-ONE on PC にエントリーされてたのはこの方ですね。多分。 2002年12月08日の雑記には だ・・・だけど・・・私のHNは「人形つかい」で「使い」じゃないんですぅ …って がーん…私がひらがなに変えたせいで余計にかぶっちゃってるじゃん。 ゲストブックに「人形つかい」で返事されているのを見ると、なんか自分がもうひとりいるような感覚に… どうしようか… --- なんて日記書いてないでさっさとプログラム仕上げなさいって… ☆[コメント] | |||
| 2004/11/02 X-3 | |||
|
★
第7回ROBO-ONE競技規定公開
10/31に第7回ROBO-ONE競技規定(PDF)が公式ページで公開されました。 足裏サイズはかねてからの噂どおり 3-1-2. (a) 前後の長さは脚の長さの50%以下、左右が30%以下。 ただし、足裏の最大長さは15cm以下とする。 ゴーレムくんは 28cm の脚に 13.5cm×7.5cm の足裏なので現状のままでクリアだね… …って思ったら… 最大長さは15cm?? それって、足裏の辺の間隔の最大が15cm??? まずいかも…ゴーレムくんの足裏は対角線が15.5cm… …角を落とせばなんとかなるかな… あと 4-2-1 今回より、決勝トーナメントは全て3分1ラウンド制、延長戦ありとします。 5-3. ロボットの足裏以外の部分が相手の有効な攻撃によってリング面に接地したときダウンとする。 5-8-2 ただし、相手が攻撃をかわし、相手の返し技が有効な場合はダウンとみなされる。 あたりの変更は、「ワールドレコーズ」の「ロボットバトル世界一決定戦」のルールと一緒になるってことですね。 (5-3 は「スリップダウンはダウンとしない」という意味かと) うう…今度こそ予選に出られるかなぁ… 事前審査の「倒れてから起き上がること」っていうのが難しいかも ☆[コメント] | |||
|
★
ROBO-ONEアンテナ修正
ROBO-ONEアンテナ の更新チェックが失敗するたびにアラートメールが届いて気になっていたので… ちょっと手をいれてみました。 「たまてばこ」の新しいRevisionでタイムアウト処理がちょっと変更されていたのを 1.1.6 の tama.rb に反映。 1日経過を見た感じでは、直ってる気がします。 実は「たまてばこ」の裏で「なつみかん」も動いています。 あと、まつしろさんの「ロボツク!」の更新時刻がそれなりに取得できるようになったので表示するようにしました。 ☆[コメント] | |||
|
★
進捗はどうなのよ
結局、作業できたのは帰宅後。 サーボ角を保持する構造体作って、 シリアル通信ルーチン組みこんで、 通信パラメータを環境変数から読むようにして… ってそれくらい。 むーー。もうちょっと進むと思ったのに… かなりCのプログラミング忘れてます。 あ、プログラムの名称は msp (Magical Script Player) になりました。 安直… ('-'; ☆[コメント] | |||
| 2004/11/01 X-4 | |||
|
★
PIC16F873のUSARTには高速指定があるらしい
PIC16F873の非同期通信(USART) [趣味の電子回路工作] から 通信速度の指定 むむむ… このページは以前から見てたはずなのに気づいてなかったです。 16F873にできるなら16F877でもできるのかな… BRGH=1 にすれば、38400bps も 115200bps も可能じゃん! (PICの処理が追い付くなら…) 今のプログラムは、20μsec間隔のタイマー割込で1byteづつ送受信してるから… (20μsecごとに受信と送信を交互に行ってる。つまり 1byte/40μsec) bps に直すと250000bps まで対応できる? あれ?ほんと?計算あってるのかな… ASCII転送のままで 20msec以内に全サーボの制御角指定ができそうな予感。 ☆[コメント] | |||
|
★
進捗
通信プログラムのサンプルをクロスコンパイルして L-Card側で動くとこまできました。 ここまでくれば、仕事の合間にプログラムを作って… (ぉぃ ☆[コメント] | |||

| 2004/10/31 X-5 | |||
|
★
今日のワールドレコーズ
マジンガアの紹介に「(C)ダイナミック企画」ってちゃんと出てましたね。 BGMは本物のテーマソングだし。 本番が楽しみです。 アドちゃんの紹介で、「相手をスリップさせようという姑息な技」って… ROBO-ONEと違うからリングを汚してもOKってこと? ('-';; --- 参考: 日本テレビ ワールドレコーズ --- あ、えーっと進捗は… シリアル通信のサンプルプログラムがコンパイルできました。 …って、それだけかよっ! ☆[コメント] |

やっぱり載せちゃまずい?? | ||
|
★
今日のワールドレコーズ!! で ロボット最強バトルの予告が
あるみたいですよ。 書くのが遅くなっちゃいました。 --- 参考: 日本テレビ ワールドレコーズ URA-Gikenの「ぼちぼち日記 2004.10.29」 第一回に登場した ADO を製作している菅原さんのサイト ☆[コメント] | |||
|
★
ROBO-ONEアンテナ不調
ROBO-ONEアンテナで一部のサイトの更新チェックができなくなっています。 引越先のサーバ環境とアンテナソフトの相性が悪いようです。 直し始めると色々時間を取られてしまいそうなので、 ROBO-ONE Special が終わるまではこのままにさせてください。 ごめんなさい。 --- アンテナの不調が気になってロボ開発できない… って、それじゃ本末転倒じゃん > 私 ☆[コメント] | |||
| 2004/10/30 X-6 | |||
|
★
やることリスト
残りあと6日となった今、やることはモーション作成しかないはず… なんですが、歩行モーションの作成でシェルスクリプトの限界が… (私の能力不足なんだけど) ということで、モーション再生まわりを作り直すことにします。 それが終わったら、モーション作成。 その後、操作用のタクトスイッチ取り付け (間に合わない予感…) ☆やること一覧
…来週の木、金を休んじゃおうかしら… って、木曜日は会議があるのでした。 ☆[コメント] | |||
| 2004/10/29 X-7 | |||
|
★
交換してみたけど…
ハイパワーギヤ+ストロングギヤに交換したら、やっぱりガチガチになってしまった… ギヤの噛み合わせが悪いのかなぁ… ☆[コメント] | |||
|
★
右ひざサーボ交換中
10/25に 右ひざサーボダメかも… って書いてましたが… 先程ダメになりました。 「2346ICS投入か…」と思われましたが、 以前に股関節ピッチサーボを交換した際に壊れていなかった側の 2144 が残っていました。 ということで、今からハイパワーギヤへの交換作業です。 ☆[コメント] | |||
| 2004/10/28 X-8 | |||
|
★ (URLメモ) サーボアーム+連結パーツ:SC-EZA 発売!
「楽天市場」ツクモ ロボット王国から サーボアーム+連結パーツ:SC-EZA ページ後半に載ってる「組合せ例の画像」を見てると、 「4セット買いますっ!」 と速攻で注文ボタンを押したくなってしまいます。 って、あれ??「※11月発売予定です。」って書いてあるけど… まだ予約だけなのかしら? ほんとは隊長にカミナリくんバージョンをオーダーしたかったりします。 (そのお金で「黒い奴」買った方がいいかも) ☆[コメント] | |||
|
★ 進捗がないよー
友達のサーバに居候してたらディスク容量が足りなくなってきました。 …で、慌てて別の友達のとこへ移動中。 昨晩と今晩はこれで作業時間が潰れちゃいました。 もうあと1週間ちょっと。 間に合うんでしょうか… まだ歩いてもいないけど、「デジタルコンパスモジュール」注文しちゃおうかな… (カンファレンスで中村博士、森永さんのお薦めでした) そういえば、カンファレンスの注目ネタを書くの忘れてますね。 ☆[コメント] | |||
| 2004/10/27 X-9 | |||
|
★ (URLメモ) 地中の親子を見つけた「電磁波人命探査装置」とは
母親は助からなかったようで残念です。 初動が早ければ… といっても、二次災害の可能性が高かったので無理だったのでしょう。 ITmediaニュースから 地中の親子を見つけた「電磁波人命探査装置」とは 消防防災機器を販売する桜護謨の電磁波探査装置の説明によると、このシステムは人の心臓の鼓動や肺の拡大、縮小の動きを捉えることで生存者のみを発見できる。 これを搭載した自律捜索ができるレスキューロボットがあれば…。 探査距離が90メートルもあるなら飛行船やヘリのようなロボットの方が扱いやすいだろうか。 ☆[コメント] | |||
| 2004/10/26 X-10 | |||
|
★ ワールドレコーズの反響
ONOの電脳壁新聞 不定期日記経由 ロボツク!から 放送を見たあと、はじめ研究所のホームページを見てみたら って、はじめ研究所の掲示板を見に行ってみると、たしかに10件程の投稿が 放送ではURL出てなかったと思うからみなさん検索したんでしょうね… ROBO-ONEアンテナにもGoogle経由で100件程度のアクセスがありました。 (放送後から25日24:00までで検索キーに[ROBO]を含むもの) はじめ研究所が載ってなくてすみません。 すぐ載せます。(汗 --- 私は、渡辺正行さんの 「いい!この世界はあるよ!伸びるよ、これ!」 というセリフがすごく嬉しかったです。 (セリフは先川原さんがfuRoのBlogに書かれていたのを参考にしました) あ、fuRoのBlogはサイエンスライター森山和道さんの日記経由です。 ☆[コメント] | |||
| 2004/10/25 X-11 | |||
|
★
右ひざサーボダメかも…
放送時間が遅れたF1をBGMにしつつ、右ひざのPDS-2144FETを分解。 ・まずギヤを洗ってグリス付け直して組み直し… 変化なし。 ・上部カバーの穴が歪んでるのかも…と交換してみたけど…変化なし。 ・イクシス製のアルミギヤをドライバで回してみると途中で固くなるみたいなので、ストロングギヤに交換…あまり変化なし。 ちょっと軽くなった気がするけど、新品の2346と比べるとめっちゃ重い。 やっぱりモーターかなぁ… ☆[コメント] | |||
|
★ ワールドレコーズ見ました
今、録画を見終ったところです。 (MPEG2で保存してます) うーん…面白い。 闘いはいつものと変わらなかった気がするのだけど… 低アングル近接カメラでの撮影とか、編集とか、出演者の反応とかであそこまで楽しめる映像になるんですね。 ゲスト受けは良かったみたいだけど、視聴者の評価はどうなんだろう… ROBO-ONEの決勝戦も時間無制限にすると楽しいかも。 坂本さん菅原さん森口さんお疲れさまでした。 あ、解説で出ていた先川原さんもお疲れさまです。 --- 今日は派遣先が創立記念日なのでお休み。 さっさとサーボのメンテをしなきゃ。 ☆[コメント] | |||
| 2004/10/24 X-12 | |||
|
★ Red version到着
お昼ごろ Red version 到着。 おっきな箱の隅っこに、エアキャップに包まれたサーボが2つ。 マニュアルも付いてません。 (前回購入したときは、2日差で特別セール逃しました) ほんとに「バルク品」って感じでした。 でも、今はまだ 2144とは交換できない… サーボコントローラ側に、サーボの特性差(角度/PWM値)を吸収する機能がないので。 とりあえず、動きが渋くなった2144のケースを交換してみます。 --- 今日の「ワールド★レコーズ」は今から録画をみるところです。 ☆[コメント] | |||
| 2004/10/23 X-13 | |||
|
★ 頭部デザイン (その2)
頭部に使うマウスを調達するために会社帰りにヨドバシ川崎店へ(昨日の話です) …しかし… さすがに3年くらい前に買ったモデルなのですでに生産中止。 ライトグレーのモデルしかありませんでした。 これを買って色を塗り直すかなぁ… でも、オレンジの部分の透明感出せないし… パッケージがマウスと同じ形の透明なプラスチック(?)になってるから、これを量産できるといいんだけど… それともバキュームフォーム? ('-';; 無理 結局決められずに買わなかった。 駐車券もらうために太陽誘電のDVD-Rを20枚買っただけで終わり。 さて…どうしようかな。 ☆[コメント] |

マウスと透明パッケージ (手前のちっちゃいのは顔) | ||
|
★ 昨日のお買物
ロボット王国で 「ROBO-ONE SPECAL 開催記念 サーボモータ特別セール」 をやってるので KRS-2346ICS Red version を2つ購入。 実戦投入用ではなく、PDS-2144 FETの予備 Redの機能を生かせるようになるのはいつになるんだろう。 このお金でJINさんのATmega128用ボードを買った方が良かったんじゃ… …なんて思ったりするけど、やっぱり電子回路周りは自分で全部やってみたいのでした。 あれ?そういえば、特別セールは楽天市場だけじゃなくてお店でもやってるのかな? 最近、全然お店に行ってないや… ☆[コメント] | |||
| 2004/10/22 X-14 | |||
|
★ 頭部デザイン決定(?)
会社の同僚の机にあったガチャポン(?)のクリアケースをもらって、載せてみたけど… あまりにも似合わない… で、ふとそばにあったロジクールのワイアレスマウスを載せてみた。 なんかいい感じ。 ついでに、以前に試作した顔の一部をくっつけてみたらさらにいい感じに。 ということで、当初の予定通りモーターヘッド路線となりました。 コナン君は参号機以降ということで。 ☆[コメント]
|

マウス頭上半身拡大 | ||
| 2004/10/21 X-15 | |||
|
★ ビクターの超小型二足歩行ロボ
ITmedia LifeStyleにも出ていることに気づいたのでメモ 通信は Bluetooth なんですね。 過去の分とあわせると
ってとこかな。 そろそろリンク集作ろうかなぁ… サーボ制御ノウハウとか、板金とか、CNCとかカテゴリ分けて… って、思ったらONOさんとこの歩行ロボットリンク集でいいのか… ☆[コメント] | |||
|
★ 右ひざのサーボが…
初心に帰って(?)足踏みからやり直し中。 今日はもう終わりにしてゴーレムくんを休ませようとしたら… なんか、右ひざが固い。 サーボの動きが渋くなってる。 モーター焼けかけなのかな…そんなに発熱してないはずだけど… それともサーボケースの軸受が歪んだのかな。 むぅ… 遂に予備のKO-2346ICS投入でしょうか… ☆[コメント] |
現在調整中 | ||
| 2004/10/20 X-16 | |||
|
★ (メモ) rsyncの使い方(その2)
ひとつ前で書いた rsync -a src rsync://192.168.0.1/test/dst だと rsh を使って動いてしまう模様 rsync同士で直結したい場合は rsync -a src 192.168.0.1::test/dst と書くみたい。 (192.168.0.1のところは同期したいサーバのIPアドレスまたはホスト名) ☆[コメント] | |||
|
★ Dash にエントリーしました
まだ歩いてもいないのに… ☆[コメント] | |||
|
★ 今だ歩けず…
左足を一歩踏み出した状態から、右足を踏み出すスクリプトを作成中。 …って…全然歩けない… うーん…エントリーするかどうか悩む… (無謀だってば) ☆[コメント] | |||
| 2004/10/19 X-17 | |||
|
★ 昨日のお買物 (ROBOCON Magazine No.36)
買いました。 読むのは明日以降です。 エントリー〆切まであと47時間。 ☆[コメント] | |||
|
★ オペアンプのこと
懇親会の二次会で、kenjiくんに 「ポテンショメータの端子をCPUまで引っ張ってくるならオペアンプ入れた方がいいよー」 って、話したのはいいんですが… 非反転増幅回路でいいんだっけ? って、でもどうやったら増幅率1になるんだろう… (増幅率は (R1+R2)/R1 って R2を0Ωにしていいのかな…) 前に宮田さんのとこで回路図を見たような、それともu-hirohitoさん(通称:うっちー)のとこだったのか… Googleで検索してみたけど見つからない。 それともボルテージフォロア?? あぁ…やっぱり電子回路の授業を真面目に聴いておくんだった… 参考URL: オペアンプ回路の豆知識 [なひたふ新聞] --- あわわ…そんな先のこといいから歩かせないと… ☆[コメント] | |||
| 2004/10/18 X-18 | |||
|
★ (メモ) rsync の使い方
rsync で L-Cardとサーバ間のファイルを同期する方法。 (Linux しょってるロボってゴーレムくんだけだから参考になりませんね) 環境: サーバ : Vine Linux 2.6r4 ロボ側 : L-Card+2M (rsync導入済み) 準備: サーバ側に /etc/rsyncd.conf 作成 中身は [test] read only = false path = /tmp/rsync comment = rsync test area []の中はモジュール名(なんでモジュールと呼ぶかは不明) パラメータは rsyncd.conf の man ページ [Infoscience]参照のこと テスト: rsync -an src rsync://192.168.0.1/test/dst これで、ローカルの src を サーバ側の /tmp/rsync/dst にコピーできる 逆向きは rsync -an rsync://192.168.0.1/test/src dst URLは rsync://サーバIPアドレス/モジュール名/対象パス名 となる。 URLにモジュール名が入ることに注意。 rsyncについてはrsyncのページ [Infoscience]参照 ☆[コメント] | |||
|
★ ホイホイさん到着 & 開発再開
お昼に佐川急便がホイホイさんを届けにきました。 開発再開するためにお部屋の片付けをしてたら結局夕方。 ゴーレムくんを引っ張り出してきて、ホイホイさんと記念写真を撮ってみました。 (ゴーレムくんは自立ではなく、歩行練習器にぶら下がってます) 晩ごはんの後、電気入れて、ログインして… えーっと…動作スクリプトはどうやって実行するんだっけ…(汗 一歩踏み出すスクリプトのタイムスタンプは 2004/08/26 ってことは、ほぼ2ヶ月ぶりに触るってことね。 スクリプトの実行方法やサーバとのファイル転送方法を確認してたら、もうこんな時間。 …って途中でホイホイさん読みはじめちゃったから時間無いんだってば… さっき読み終わったとこ。満足☆満足。買って良かったです。 萌え系ロボめざしてがんばろー! (ぇ ☆[コメント] |
やっぱり顔を作らなきゃね… | ||
| 2004/10/17 X-19 | |||
|
★ ROBO-ONEカンファレンス
また今回も遅刻… 会場に入ったのは 12:00 で A-Doの菅原さんが話し始めたところでした。 森山さんの特別講演を聴き逃したのは残念… 他の参加者の方の話では、観客としての意見や要望が色々出ていて参考になったとのこと。 あと、次回大会では足裏の規定が前後50%、左右30%になるとか。 ゴーレムくんは 28cm の脚に 13.5cm×7.5cm の足裏なので現状のままでクリア。 (だから…その前に歩かせろってば) 気になった講演とかはまたあとで書きます。 ☆[コメント] | |||
| 2004/10/15 X-21 | |||
|
★ ようやく表の仕事が一段落
って、まだトラブルは2つ程、課題は3つ程残ってますが。 今から始めて、歩行+起き上がり できるようになるかなぁ… ROBO-ONE Dash だけでも出たいのだけど。 結局、8月後半から手つかずで、相変わらず一歩踏み出すだけ。 ☆[コメント] | |||
| 2004/10/14 X-22 | |||
|
★ 今日のお買物 (一撃殺虫!!ホイホイさん 初回限定版)
だめもとで「まんがの森」オンラインショップを見たら在庫がありました。 一撃殺虫!!ホイホイさん 初回限定版 [manganomori.net] 不安だったので電話で在庫を確認したら、「残り少ないですがまだ在庫はあります」とのことでした。 入荷数が一般書店とは全然違うのでしょうね。 代引での注文だとSSLになってない(!)ので、そのまま電話で注文。 届くのは日曜日 (通信路以外からも情報漏れは起きるんですけどね) ☆[コメント] | |||
| 2004/10/13 X-23 | |||
|
★ ホイホイさん初回限定版の在庫が…
ほりさんとこのBBS見てたら、「一撃殺虫!!ホイホイさん」のコミック初回限定版(DVD付き!)が欲しくなってしまいました。 で、アマゾンとか楽天とかBK1とかで探したんだけど… どこも在庫切れ! …(o_ _)oパッタリ 明日、近所の本屋さんで在庫を調べてもらおう… (よその店舗の分も調べてもらえる) ☆[コメント] |
(リンク先はメディアワークス) 一撃殺虫!!ホイホイさん 初回限定版 著者 : 田中久仁彦 発売日 : 2004/09/30 定価 : 3,000円 ISBN : 4-8402-2767-5 | ||
|
★ 昨日のお買物 (電子工作のためのPIC16F活用ガイドブック)
帰り道の本屋で「復活の地III」を探すも見当たらず。 で、開発再開の第一歩としてPIC周りを思い出しましょう…ってことで 電子工作のためのPIC16F活用ガイドブック (電子工作の実験室:著者サイト) 技術評論社 amazon.co.jp リンク先にもあるように「電子工作のためのPIC活用ガイドブック」(初版平成12年)の改訂版 ざっと読んでみたけど、内容(PICの概要とか内蔵モジュールの使いかたとか)はほとんど差が無さそう。 MAPLAB IDEの説明が新しいバージョンを元に書いてあることとか プログラムメモリへのRead/Write方法の解説とか MPLABでリロケータブルオブジェクトを作る方法とか が新しいとこかな。 上の3つとも、著者の後閑さんのページ「電子工作の実験室」に書いてはあるのだけど、 手元に欲しかったので買ってしまいました。 ☆[コメント] |
(リンク先は技術評論社) 改訂版 電子工作のための PIC16F活用ガイドブック 後閑哲也 著 / B5変形判 / 464ページ ISBN4-7741-2131-2 / 2004年9月9日発売 CD:1枚 定価2919円(本体2780円) | ||
| 2004/10/11 X-25 | |||
|
★ 体調復活…かな
四日間ずーっと寝て過ごして、ようやく体調が戻ってきた感じ。 うーむ…いつのまにか残り1ヵ月切ってる… カンファレンスには歩ける状態で連れて行きたかったけどちょっと無理かな。 今週からは本業は忙しくなくなるはずなんだけど… ほりさんの「たぬたぬGSD」の顔作成を見てたら、 ゴーレムくんにもかわいい男の子の顔を付けたくなってきました。 …って、その前にやること一杯あるんですが… そろそろ本格的に開発再開しなきゃ。 ☆[コメント] | |||
| 2004/10/06 X-30 | |||
|
★ ビクターが超小型二足歩行ロボット展示@CEATEC JAPAN 2004
IRC経由 PC Watch 10/05版 「CEATEC JAPAN 2004」開幕から ビクターのブースに展示されていた超小型2足歩行ロボット「J4]。全長20cm、重量約770g、関節自由度26で、Bluetoothを使った通信が可能。歩行は可能だが、手狭な会場のため歩行デモは行なっていなかった (リンク先に写真あり) 20cmって小さくていいな… エンジェリックレイヤーなサイズ。 写真からするとアクチュエータは直交型で、QRIOのそれと似てる。 アクチュエータだけ欲しいかも…(笑 ☆[コメント] | |||
| 2004/10/02 X-34 | |||
|
★ Speecys 11月30日発売。価格は40万円前後。
イカロスさんのコメント経由 ITmedia ライフスタイルから 2足歩行ロボ組み立てキット発売 OSも公開 2004/09/29 19:40 更新 初心者でも簡単に組み立てられるというキットを11月に発売。OSも公開してカスタマイズ可能にする。 2004.09.18の日記に書いたロボットの製品発表があったのね。 40万円前後ってことは… ボディの板金やCPUボードの分を引いて、サーボだけで30万だとすると、サーボ1個で1万5千円ってとこでしょうか。 予想よりもずいぶん安い。 双葉の既存のサーボのギヤレイアウトを変えただけなのかな… しかし…足が短くてかっこわるいぞ! このサーボならもっとスタイル良く作れると思うのに。 …でも、このサーボを買って、ゴーレムくんの足をスマートにしたかったり… ☆[コメント] | |||
2021年:
1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年