まじかる☆マリオネット: 開発日誌 (2005 4Q)
トップページ
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
| 2005/12/31 X-77 | |
|
★ 12:52 帰省しました & 種デス年末SP
| |
| 2005/12/29 X-79 | |
|
★ 14:24 誕生日
| |
| 2005/12/23 X-85 | |
|
★ 23:54 Alibre Design Xpress (その4:動きましたぁ)
| |
|
★ 22:58 Alibre Design Xpress (その3:解決方法は見付けた…)
SISOさんのコメントにあった「3DSのユーザフォーラム」を探したら、エディタ画面がグレーになる話が載っていました。 Alibre Xpress ユーザーネットワーク:「画面のトラブルシューティング」 から 2005/09/22 08:24 ということで、FAQを見に行くと… 本問題が発生した場合、下記の対処方法をお試し下さい。 …うーん… 去年買って放置したままの RADEON-9200 に替えてみますか… (Linuxで使えなくなって、Win2K専用機になるかも…) [☆コメント] [△先頭へ] | |
|
★ 20:49 Alibre Design Xpress (その2)
| |
|
★ 16:56 (録画メモ) 12/25 25:50〜 種デス 年末スペシャル
ロボ研日誌(2005.12.03) 経由 機動戦士ガンダムSEED DESTINY 予告編ライブラリー から ガンダムSEED DESTINY、まだまだ終わりません!なんと放送地域が追加が決定しました! Yahoo TV から ガンダムSデスティニーSP 50話(Edited入れると51話)を全部DVDに焼くかどうか悩んでたのですが… (DivX 2Mbpsだとメディア6枚くらいになりそう) 年末スペシャルのできがよければ、そっちを保存することにして、シリーズの録画は廃棄かな。 --- しかし、なぜこの情報を公式ページのトップに載せないのだろう…。 [☆コメント] [△先頭へ] | |
| 2005/12/21 | |
|
★ 20:38 Alibre Design Xpress 悩み中
| |
| 2005/12/20 | |
|
★ 22:11 上体加速時のサーボ制御角補正
今日は熱っぽかったので早引け。 (…と言っても会社を出たのは 19:00) 年賀状作成シフトになってるはずなのに、疲れが溜って早起きできず。 そして、ゴーレムくんにも一週間以上触れないまま。 一応、一歩目は安定するようになっているけど、課題が一つ。 静止状態から上体を加速するときに、股関節から上が追い付いてこなくてのけぞったような感じになってる。 ひざと足首と股関節ロール軸のサーボ制御角は補正していたけど、股関節ピッチ軸も補正が必要なのね。 (上半身が重くて長い弊害がここにも) 重力加速度による補正だけじゃなくて、身体の各部分の加減速による補正も必要ということを忘れていました。 年内に普通に歩けるようになるかな…。 [☆コメント] [△先頭へ] | |
| 2005/12/18 | |
|
★ 14:06
うなぎパイ
| |
| 2005/12/17 | |
|
★ 18:27
忘年会も欠席ですぅ…(泣
| |
|
★ 15:29
練習会欠席
| |
| 2005/12/14 | |
|
★ 18:56
フレーム改修計画
| |
| 2005/12/13 | |
|
★ 18:56
(URLメモ) ASIMOの走りの動画
IRCでURLが出てたのでメモ 新型ASIMOのTECHNOLOGY:走行機能の向上 このレベルまで到達したい…。 時速6km って 秒速 1.67m … OmniZero.2のアスリートのタイムより速い… (最初の3mだといい勝負かな??) [☆コメント] [△先頭へ] | |
| 2005/12/12 | |
|
★ 23:53
今月後半のToDo
| |
| 2005/12/11 X-4h | |
|
★ 5:21
すみません…棄権します
| |
|
★ 1:55
制御系動作チェック完了
| |
| 2005/12/10 X-1 | |
|
★ 14:02
進捗 (補給物資到着 & 歩行試験)
注文していた DC-DCコンバータがようやく到着 (間に土日を挟んだから仕方ないか…) 予想よりちょっと重いです。ケース無しのモデルにすればよかったかな。 --- スーパーキャパシタさま実戦投入後、初のバッテリーによる歩行試験。 結果… NG 直立するのは問題ないけど、足を踏み出した瞬間に全身が痙攣…… 今回、バッテリー電圧を(テスターで)測れる場所ができたので、電圧を測ってみたら… 無負荷状態(サーボ信号OFF): 7.5V 定常負荷状態(直立時): 6.5V …立ってるだけで1Vも電圧降下が… DM-330の電流計だと2Aくらい流れている摸様(以前は1Aくらいだった気がするのに…) 足を踏み出す瞬間には10Aくらい流れるから、そのときの電圧降下に耐えられないんだろうね。 残りあと20時間…、DC-DCコンバータを搭載している余裕はあるのかしら… さすがに電源ケーブル引きずって歩かせるのはどうかと… [☆コメント] [△先頭へ] | |
| 2005/12/08 X-3 | |
|
★ 1:10
進捗悪い…
| |
| 2005/12/07 X-4 | |
|
★ 20:13
mipselクロス環境 on Cygwin
モーション作り直しが入ったのに、他にもやることが… 「やったこと&起きたこと(11/27)」という日記に書くつもりだけれど、Cygwin上のmipselクロス環境も作りなおさなきゃいけない。 トランジスタ技術2000年8月号の特集付録CDに、Cygwin用のmipselクロス環境が入っていたのですが、先日の関西遠征ではこれではまりました。 ノートPCに入っていたのは最新版のCygwin。 そこに付録CDの mipselクロス環境を入れて、既存のプログラムを make して動いたので安心していたのですが… 単一モジュールのプログラムはコンパイル&リンクできるのに、複数モジュールでできているプログラムは ld.exe がアボートしてしまってリンクできませんでした。 orz gcc が悪いのか binutils が悪いのか… とりあえず、binutils を疑ってそっちだけ作りなおしてみようかと。 --- ようやく gcc と gcclib と binutils との役割がわかってきました。 基礎からのデバイスドライバ作成講座(第4回) Agendaのある生活 あたりを参考にすればなんとかなる…かな [☆コメント] [△先頭へ] | |
|
★ 14:51
歩行モーション作りなおし
| |
|
★ 1:03
第10回ロボプロ・アスリート エントリー
| |
| 2005/12/05 | |
|
★ 23:29
(URLメモ) 女の子ロボ同士の戦い (初?)
Age of ROBOT (mabotanさんの日記) から 【05年12月4日】 第9回ロボプロアスリート カメラアングルも撮影タイミングも最高。 半身に構えたAMATERASちゃんとスピード感あふれるりりあちゃんが格好いいです。 エンジェリックレイヤーの世界がすぐそこまで… 私も参加したいよぉ… --- mabotanさんの日記のように、日付ごとにリンクできるようになっているとURLメモしやすくて便利ですよね。 [☆コメント] [△先頭へ] | |
|
★ 22:54
(URLメモ) “感情”を搭載したロボットの研究、2005国際ロボット展
K.Moriyama's diary 経由 ITmedia エンタープライズ から “感情”を獲得したヒューマノイドが見る夢「WE-4RII」の過去と未来 まじかる☆マリオネットがここに到達するのはいつだろう… 来年には人工無脳搭載までいけるといいんだけど… 同じく K.Moriyama's diary 経由 PC Watch から 2005国際ロボット展開催〜産業用ロボットからパックマンロボットまで 先週はめっちゃ忙しくてお休みとれなかったので結局行けなかった。 土曜日は午後まで倒れてたし、夕方は友人との忘年会があったし… そもそも人混み苦手なので「土曜日に行く」というのは無理。 ROBO-ONE関係の人が出展側に多かったとのこと。 皆の日記から十分雰囲気を楽しめました。 [☆コメント] [△先頭へ] | |
|
★ 12:21
(録画メモ) 12/5 19:55〜 NHK BS2 「ロボコン」
ロボットのイベント情報〜アトリエ ロボット〜 経由 BSオンライン から 衛星映画劇場 ロボコン 2003年 12月5日(月) 後7:55〜9:54 あうう…昨日の夜に気付いていたのに録画予約し忘れちゃった… 19:30までに帰宅できるだろうか… うちのHDDレコーダはBSチューナ(BS付きビデオデッキ)と連動できません。 (ビクターの制御コード知りたい…) --- 2005.12.05 19:20 まだ会社にいたりして… 観ることすら叶わなそうな予感 [☆コメント] [△先頭へ] | |
|
★ 2:09
スーパーキャパシタさま投入、なんとかなるかも…
ブースター7に5V〜8Vの入力電圧をかけて、出力電圧をテスターで測ってみたら… 入力そのままの(正確には0.5Vくらい低い)電圧が出ていました。 やっぱりお亡くなりでしょうか…。 あきらめて駆動系電源と制御系電源の間にスーパーキャパシタを入れたのですが…制御系の誤動作が解決しない。 ふと思いついて電源電圧を測ってみたら 6.6Vしかない…これだとちょっと電圧落ちたらPICがリスタートしちゃうね。 (PICモジュールのレギュレータを低ドロップタイプに交換する手もありますが…) どうもスイッチング電源(DM-330MV)のメーターがずれちゃってるみたい。 7.2Vになるように調節したら誤動作は解消されました。電源のメータだと7.8V。 キャスターでガラガラ運ぶからずれちゃうのかな… これからは移動するたびに電圧測らなきゃね。 あとは明後日くらいに届く(はずの)DC-DCコンバータさま待ち。 普通に歩けるようになったら、12/11のアスリートに申し込もっと。 (締め切りいつだろう…) [☆コメント] [△先頭へ] | |
| 2005/12/04 | |
|
★ 20:57
先週やったこと&起きたこと (26日)
[☆コメント] [△先頭へ] | |
|
★ 17:24
先週やったこと&起きたこと (25日)
[☆コメント] [△先頭へ] | |
|
★ 16:48
先週やったこと&起きたこと (23〜24日)
| |
| 2005/12/03 | |
|
★ 14:46
(URLメモ) JANコードから書籍検索
(ロボットとは内容がかけはなれているような…) 溜ってたレシートを家計簿につけようと思ったら… 11月6日(1ヶ月も前かよっ!)に買った本が思い出せない。 レシートには 「趣味・実用書」 9784829176030 という記述だけ。 「…実用書って…何を買ったっけ?」 と、ダメもとで Google に数字だけ入れてみると… 「Google検索: 9784829176030」 JBOOK:超解!気象精霊記:ドラゴンマガジン編集:書籍 あ、それか。(ぽんと手をうつ) JBOOKの検索フォームにはJANコード指定検索もありますね。 便利な時代になりました。 [☆コメント] [△先頭へ] | |
| 2005/12/02 | |
|
★ 1:43
(URLメモ) DC-DCコンバータ
「スーパーキャパシタ使おうかな」という日記を書いたら、SISOさんから「zipponさんが使っているCOSELのDC-DCコンバータの方が良いのでは?」というメールをいただきました。 「COSEL MAGI」で Google すると浅草ギ研の自作ロボット掲示板がトップに。(さすがだ > Google) zipponさんは ZSU と書いているけど、ZUSでしょうか? > 製品情報 コーセル株式会社 (フレーム構成のページにしたいなら、フレームごとリンクできる構造にして欲しい) 出力3Wのモデルでも重さ16g。0.47Fのスーパーキャパシタよりずっと軽い…。 2つくらい買おうと思うのだけど、店舗売りしてるところが見つからないです。(汗 (espyさんから「マルツパーツ」を教えてもらったけど入力4.5〜9VのはWeb在庫無し) --- 2005.12.02 14:55 追記 Web通販で即納してくれるところ↓が見つかったので、今回はそちらから取り寄せてみます。 「chip1stop」半導体、電子部品のスピード調達OneStopサイト [☆コメント] [△先頭へ] | |
| 2005/12/01 | |
|
★ 18:52
「師走」 早い…もう一年過ぎてしまった…
去年の誕生日にいただいたランプがまだ箱詰のままだったりします。 (ランプを使えるように部屋を模様替えするプランはどこへ…:汗) 今年一年はかなりロボ一色だったように思うのだけど、私が進むよりも速く周りが流れてる気がします。(多分気のせいではない) 来年もきっとロボ一色でしょう。 今年の誕生日にはSDのサラちゃんかナナちゃんをお迎えしたかったけど、お部屋の整理が間に合わないので延期になりそうです。 来年早々にDDのヘッドを買うつもりなので、そのときに一緒にお迎えするかも。 ちなみに一年前の日記を見てみると… ゴーレムくんは相変わらず歩かないし… ほとんど状況が変わってませんね。(汗 まあ、ゴーレムくんは歩くようになったから良しとしますか… [☆コメント] [△先頭へ] | |





| 2005/11/30 X+3 | |
|
★ 2:19
制御系故障の原因調査報告(α版)
| |
| 2005/11/28 X+1 | |
|
★ 1:15
結局ロボファイト2も棄権 & ゴーレムくん制御系故障
| |
| 2005/11/26 X-0 | |
|
★ 0:12
進捗&明日の作業項目
無線通信のテスト完了。 若松通商の通販で買ったスーパーキャパシタ(NEC製: 11V、0.47F)が届いたけど、予想よりもかなり大きくて重い…。 残念だけど今回は搭載見送り。 明日(というか今日)の作業項目をメモ
| |
| 2005/11/25 X-0 | |
|
★ 21:03
ロボプロアスリート棄権
| |
| 2005/11/23 X-2 | |
|
★ 12:55
ロボットの手
| |
| 2005/11/22 X-3 | |
|
★ 20:18
進捗 (スクリプトプレイヤーにバグ発見)
| |
|
★ 12:26
宿 & 進捗
| |
| 2005/11/20 X-5 | |
|
★ 22:33
風邪ひいた…
| |
|
★ 13:20
進捗 & 旅支度
| |
| 2005/11/16 X-9 | |
|
★ 12:46
進捗 (まだうまく歩けない)
一歩ごとに 200msec のウェイトを入れなくても歩けるようになってきました。 (歩幅:36mm、歩行周期:2歩/sec、速度:72mm/sec) でも、一歩目だけどうしても不安定。 歩行開始時のちょっとした姿勢の差で後傾したり前傾したりして倒れちゃう。 二歩目以降が大丈夫なのは足が前後に開いていて姿勢が安定するからかな…。歩幅を広げた方が安定するんじゃないかと思ったり… 通勤中に思い付いた解決策を今晩試してみて、それでもダメだったら歩行の安定化は諦め。 操作系と無線系のプログラムを作らないと間に合わない。 巧美くんのようなニュータイプじゃないし、桐蔭みたく24時間三交代制なわけでもないんだから、さっさとジャイロ付ければ良かったかも…。 (あ、カンファレンスの感想書いてないや…) [☆コメント] [△先頭へ] | |
| 2005/11/15 X-10 | |
|
★ 19:04
歩容と歩幅
(コメントの返事に書いたけど日記にも書いておこっと) 昨日の日記に書いた「最大歩幅」。 最大歩幅 65mm は「今のゴーレムくんの歩行方法の場合」です。誤解を与える書き方でごめんなさい。 今はジャイロ無しで安定させるために「一歩ごとに移動速度をゼロにする」という歩行になっています。 左右の足を線形倒立振子に見立てて、踏み出し時には軸足が振子、遊脚接地後は前足が振子になるように動かしています。 (図1) 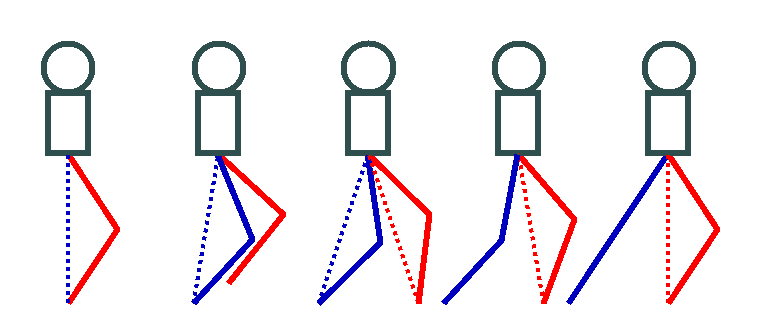 図は時間ごとの歩行姿勢を横に並べています。(左端が初期姿勢、右端が一歩の終了時) 踏み出しは振子が倒れる速度に併せて上体を動かし、接地後は倒れた振子が立ち直る速度に併せます。これで静止状態から一歩踏み出して、もう一度静止状態に戻ることができます。 一歩が終了した時、「前足、後足ともに接地していて、前足は上体直下」という姿勢になります。 ここで後脚のひざを伸ばしたときにとどく距離を最大歩幅としています。 脚の長さをL、股関節の高さをHとすると、 最大歩幅 S =√(L^2 - H^2) ゴーレムくんの場合、脚長さ(股ピッチ〜足首ピッチ)=147mmなので、股関節高さ(正確には股ピッチ、足首ピッチ間距離)を130mmの場合の最大歩幅は約68mm。 一歩ごとに静止しないなら、上体が前足の直上に来る前に後足を浮かせることができるので、もっと歩幅を増やせます。(流行の「走ってるように見える歩き」はこっちかな…) (図2)  また、足裏が前方向に長いことを利用して、つま先を支点とした倒立振子に見立てることができるように思います。 その場合、(図2)の一歩終了時に速度ゼロにならなかった上体を止められるので、足首からつま先までの長さ分、歩幅を長くできる気がします。 (図3) 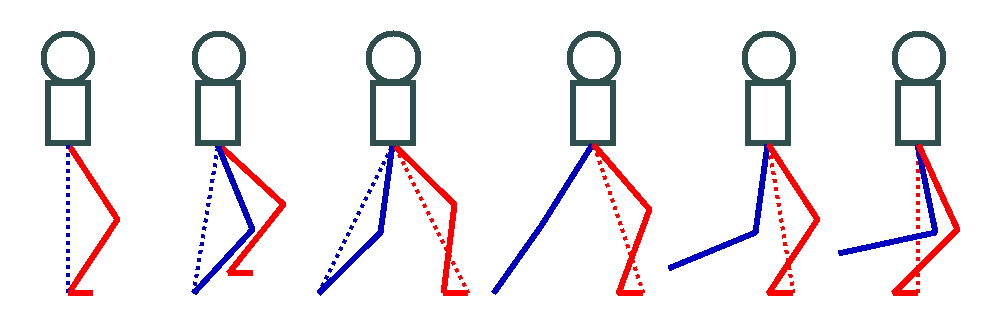 んー…色々書きたいのに図でうまく説明できない… (図1の歩きでも上体の速度ゼロにしない方法あるし、図3は他にも活用方法あるんだけど…) [☆コメント] [△先頭へ] | |
| 2005/11/14 X-11 | |
|
★ 12:14
とりあえずエントリー & 最大歩幅
| |
|
★ 1:55
進捗 (時間切れ)
| |
| 2005/11/13 X-12 | |
|
★ 13:55
今日のNHK「おはよう日本」
朝遅いので録画して鑑賞。 松ちゃん、杉浦両ファミリーお疲れさまです。 KHR-1 がコサックダンスしてたのに驚きました。 --- 「Windows用は某所で公開されてるから MPEG のを置こうかな…」と思ったら、最近は Windows Media Player for MacOS X もあるんですね。 --- 今日中に歩行&方向転換を完成させて「ロボファイト2」にエントリーしないと. でも、久しぶりに快晴の日曜日。 青空の誘惑に負けない自信が… [☆コメント] [△先頭へ] | |
| 2005/11/12 X-13 | |
|
★ 22:49
Maxima と Octave
Vineのパッケージにあったので入れてみました。 Maximaで代数式をそのまま計算できるのは便利そう… で、でも Xの二乗を 2 X って表示するのってなんとかならないんでしょうか… X**2 とか X^2 とかで表示してくれれば、そのまま Ruby や Cのプログラムに放りこめるのに… Octave もとりあえず入れてみただけ。 こんな便利なプログラムを作ってフリーで公開している人達に感謝 --- 参考URL: Maxima入門ノート (中川さん) Maximaで遊ぼう (狸穴) -- Octaveの使い方 (神戸大学大学院 稲元さん) Octaveの使い方 (福井大学 工学部 浪花智英 先生) Scilabを中心としたMATLABクローン即席入門講座 (狸穴) [☆コメント] [△先頭へ] | |
| 2005/11/11 X-14 | |
|
★ 15:20
進捗 &「ヒューマノイドロボット」読書会
読書会は今度の日曜日。 今回は近くで開催されるから行きたかったのだけど… あと2週間という状況下では読書会よりも他のことを優先しなきゃいけないのでした。 必須なのは
最低でも前進できるようにならないと、情けなくて「ロボファイト2」(ロボファイトへのリンク用URL作らないのかな…)にエントリーできない…。 ラウンドガールよりも歩行がダメダメなロボなんて… (「アスリートならいいのか!?」っていうツッコミをしないように…) [☆コメント] [△先頭へ] | |
| 2005/11/09 X-16 | |
|
★ 22:57
(URLメモ)音声データ(萌えボイス、音の杜)
ゴーレムくんは音声ユニット搭載なんてまだまだ先ですが、他の人には役に立つかもなのでメモ NyaNyaさんの日記 (2005.11.09) 経由 「萌えボイス」 萌えボイスで自分の作成した文章を好きな声優さんに読んでもらおう!ビジネスとして成り立つかどうか微妙(不正コピーできちゃいそうだし)だけど、女の子ロボに使うには最適かも… あと似たようなサービス(?)に 「音の杜 効果音と声の素材をフリーでダウンロード」 というのがあります 男の人のかけ声をゴーレムくんに使いたいけど、いつになるかな… --- 「代々木アニメーション学院の生徒さんと仲良しになって声をあててもらう」 というお馬鹿な考えが頭に浮かぶ私… [☆コメント] [△先頭へ] | |
| 2005/11/08 X-17 | |
|
★ 17:06
進捗 (ミス発見&歩行計算についてのメモ)
お昼休みに「後退」モーションを作ろうと「前進」のスクリプトを確認していたら…また間違いを発見。 停止直前に1こま(20msec分)抜けてました。 orz もしかして停止が安定しなかったのはこれが原因? そろそろスクリプト生成を自動化したいな… --- メモ:(間違ってるかも)
[☆コメント] [△先頭へ] | |
|
★ 1:20
進捗 (なんとかなってきた…かな)
もう一度足踏みに戻って、足首ロール軸の制御を追加。 なかなかいい感じ。 (関東組練習会で披露したのより安定しました) 歩行スクリプトにも足首ロール軸制御を追加して、ようやく足上げ失敗がなくなりました。 でも相変わらず前や後ろに転ぶ… 踏み出し直前の姿勢が安定しないのが原因みたい。 それに、上半身が足の移動に追い付いてない… (倒立振子の初期速度を大きく取りすぎたのかも…) 試行錯誤の末
という対策でなんとか安定して(?)歩けるようになりました。 歩幅 40mm、一歩 400msec + ウェイト 200msec なので 秒速 67mm ってとこ。 歩幅 60mm くらいまではいけそうだけど、それ以上になると遊脚の反動で倒れそう… でも、直進はこれくらいで切り上げて左右に曲がるのを練習しなきゃ。 [☆コメント] [△先頭へ] | |
| 2005/11/07 X-18 | |
|
★ 2:28
進捗 (まだつまづく…)
| |
| 2005/11/05 X-20 | |
|
★ 23:18
今日の進捗
| |
|
★ 13:02
(録画メモ)11/05 21:00- NHKスペシャル 「サイボーグ技術が人類を変える」
むアンテナ経由(見たのはずいぶん前だけど…) YOMIURI ONLINE から 「009」身の回りにも−Nスペ「サイボーグ技術が人類を変える」 NHKスペシャル公式ページ から 立花隆 最前線報告 サイボーグ技術が人類を変える 放送日とか話数で、個別の放送にリンクできるようにすればいいのに… (過去の放送分はリンクできるのに未放送分はできない) Yahoo!TV から NHKスペシャル あ…そういえばNスペをアンテナに登録するの忘れてた。 任意のサイトをRSSに変換してくれるサービス使った方が楽かな… [☆コメント] [△先頭へ] | |
| 2005/11/02 X-23 | |
|
★ 23:51
倒立振子の計算間違ってた… (汗
「ヒューマノイドロボット」「第4章 4.2 二次元歩行パターン生成」の式(4.4) x'' = ( g / z ) * x を時間軸で積算(while命令でループしてるだけ)して20msec毎の重心位置を計算させて 「ほーらできた」とか思ってたら… 50倍の加速度で計算してました… ◯| ̄|_ でも、その計算で作ったモーションで10歩前進できてたりします。 (のけぞりすぎて転ぶこともあるけど) 足首から足裏後端まで 50mm だけどZMPが許容範囲に入ってるのかな。 足裏後端からみた倒立振子の式と、足裏前端からみた倒立振子の式を解けば加速度の許容範囲が計算できるような気がします。 どのタイミングで加速すればいいのかも判ってきました。 bogoMIPS 40 & FPU無しのL-Cardでリアルタイム計算できるかな… 明日も頑張りましょう。 [☆コメント] [△先頭へ] | |
| 2005/11/01 X-24 | |
|
★ 20:05
「霜月」今年ももう終わりだねぇ…
早い…早すぎるよ…もう冬じゃん。 暖かかった日々はどこへ… そろそろ年賀状用の写真撮影考えなきゃ。 トップページ左上のゴーレムくんの写真も撮影してから1年過ぎちゃってます。 去年の秋の ROBO-ONE Special のエントリーシート用にマウスを載せて撮影したんだっけ… (2004.10.22の日記参照) 公式戦デビューに備えてちゃんとした外装を付けましょう。 [☆コメント] [△先頭へ] | |
{kind=link}
{kind=link}
{kind=link}
| 2005/10/30 X+1 | |
|
★ 1:47
東京組練習会第一回
行ってきました。 結局、一歩目を踏み出せるだけで、二歩目以降のモーションは間に合わず。 (現地で作ろうと思ったのだけど、バトルが面白くてつい見入ってしまって…) 無難にこなせる足踏みだけみんなに見てもらって終了。 最後にやってた「バトルフラッグ(?)」が面白かったです。 卓球台をフィールドにして四隅に紙コップを置き、2チームに別れて、相手陣地の紙コップ2つを落とした方が勝ちというゲームでした。 ランブルよりずっと楽しい。ROBO-ONE本戦でもやらないかなぁ… 企画した石川さんとえまのんさん、会場の手配と準備をしてくれた代々木アニメーション学院の皆様に感謝。 --- 2005.10.30 02:20 追記 練習会の摸様は、snさんの「散財心理学実習講義200X」(2005.10.29)が詳しいです。 ☆[コメント] [△ 先頭へ] | |
| 2005/10/29 X-day | |
|
★ 4:06
X-5h できた(一歩目だけ)
| |
| 2005/10/28 X-0 | |
|
★ 1:56
X-32h 等加速度運動じゃないってばさ…
| |
| 2005/10/27 X-1 | |
|
★ 14:02
あと1日…つまづく原因(その2)
(リンク先は楽天)
 あらためて「ヒューマノイドロボット(リンク先オーム社)」「第4章 4.2 二次元歩行パターン生成」の式(4.4)を見ると… x'' = ( g / z ) * xということは、重心の運動は等加速度運動であってますね… じゃあ、なぜつまづくのか…? もう一度歩行モーションを見直してみると… 今のモーションは一歩ずつ静止するようになっているのに、上半身が等加速度運動で動いていました。遊脚接地時に上半身の速度が最大になるはずなのに、スクリプト上ではいきなり上半身の速度が0に… なので解決策は
間に合うんだろうか… ☆[コメント] [△ 先頭へ] | |
| 2005/10/26 X-2 | |
|
★ 4:03
つまづく原因は判った…気が…
| |
| 2005/10/25 X-3 | |
|
★ 23:26
なかなかカンファレンスの感想書けない…
| |
| 2005/10/23 X-5 | |
|
★ 21:15
録画予約失敗… (FNNスーパーニュースWEEKEND)
「ゆくぞ、ダイナマイザー」の「ホットニュース」を見て思い出した(以前に「ファミロボ製作記」で見たのを忘れてました)ので、録画予約して出かけたのですが… 買い物から帰ってきてみたら録画されてない…(泣 crontab へのエントリ追加はしていたのだけど、コメントアウトしたままでした。(馬鹿 …まあでも、「散財心理学実習講義200X(2005.10.23)」(snさんとこ)を見るといろいろ書いてあるので見なくてもよかった…かな。 ☆[コメント] [△ 先頭へ] | |
|
★ 15:52
今からじゃon PC発表会は間に合わない…
| |
| 2005/10/20 X-8 | |
|
★ 2:00
ゴーレムくんの重心位置
これまでずっと放置してたけど… 線形倒立振子の式を使うなら重心位置の測定が必須。 歩行時の基本姿勢をとらせておいて、糸で吊して調査 「胸に電池が入っているから腰のあたり?」 と思っていたら、重心は股関節ロール軸のちょっと上でした。 地上高285mm ということは、両脚の重量と上半身(股関節ヨー軸を含む胴体+両腕)の重さが一致するのね。 (腕を曲げているから微妙だけど…) あれ?でも、身体全体の重心でいいのかな? 歩行中に片脚のピッチ軸に加わる質量は上半身+片脚な気が… んー…とりあえず2次元のモーションジェネレータを作ってから考えよう。 ☆[コメント] | |
| 2005/10/19 X-9 | |
|
★ 2:51
自習中 「ヒューマノイドロボット 4.2 2次元歩行パターン生成」
(リンク先は楽天)
(リンク先はアマゾン)  日曜日の「ヒューマノイドロボット」の読書会に行かなかった(というか申し込んでない)ので、自習してます。 読書会の対象だった「4.2 2次元歩行パターン生成」 買った直後に読んだときは、図とグラフだけ見て終わりになってました。(ぉぃぉい) 今、「4.2.2 線形倒立振子のふるまい 式(4.5)(4.6)」のとこ。 「はじめてのロボット創造設計」P119「動的バランスのとれた運動生成の計算」に出ている式と違って、初期位置と初速度がはっきり判る式になってます。 cosh(),sinh()って何だっけ…(汗 これならプログラムにするのも楽そう。 んー…買ったときにちゃんと読んでいれば… (でも、その時点ではゴーレムくんが出来ていないので無駄) 「普通の会社員の日記(2005年10月16日)」によると、次回は法政大学小金井キャンパスらしいので参加したいです。 (千葉よりはずっと近い) ☆[コメント] | |
| 2005/10/18 X-10 | |
|
★ 23:26
今日のお買物 (ロボコンマガジン No. 42)
リンク先は オーム社

ようやく手に入れました。
まぁ…でも…私がやりたいことに適したキットは無さそう。 結局自分で作るしかないと。 …で日記を書いてみて、あと10日しか無いことに気付く。 --- 2005.10.18 23:46 追記 「制御をはじめよう!ロボットを上手に動かすために」が終わって新しい連載が始まるのかと思ったのに… 制御工学的な記事が無くなってしまった。 ☆[コメント] | |
| 2005/10/17 X-11 | |
|
★ 23:59
日本3大女性型ロボット
「でかい女性型ロボット」ではないので注意。 先日、大阪エキスポランドで行われた「ロボプロ・アスリート in エキスポランド」で関西組が誇る(?)女性型ロボットが三体揃い踏みだった摸様。
「日本3大女性型ロボット」って呼ばれ方いいなぁ…「星団三大モーターヘッド」みたいじゃん。(何 一体が自分の作った娘だったら良かったのに… プロトタイプの製作に4年もかかってちゃ無理か… 来年は仲間に入れてもらえるように頑張ろう。 皆のレベルに追い付かなきゃ。 ☆[コメント] | |
| 2005/10/16 X-12 | |
|
★ 23:39
ロボカップ中型リーグは凄く進歩してるね
昨日のETV特集「ロボカップ2005」の録画を見てるとこです。 中型リーグの決勝戦「慶応アイゲン vs ドイツ ファイターズ」は見ごたえがありました。 ヒューマノイドリーグがあのレベルになるのは何時でしょう。 小さくて高性能なCPUと軽量ハイパワーなモータが出るまではちょっと難しいかな… 私もロボカップに参加できるくらいのロボットを作りたい。 ☆[コメント] | |
|
★ 15:30
ロボプロ・アスリートとかロボファイト2とか
今ごろ関西勢はみんなでエキスポランドかな… 「ロボプロ・アスリート in エキスポランド」 ゴーレムくんも参加させてみたいけど都合が付きそうにない。 土曜日にも開催してたら、「ロボファイト2」(2005.11.27)に参加するときに一緒に出られるんだけど。 (その前にちゃんと動くようにしなよ…) カンファレンスには参加資格審査モーションくらいしか間に合いそうにないので、連れて行くのは取り止め。 X-Dayは「関東組ロボ練習会」に変更 ☆[コメント] | |
| 2005/10/14 X-7 | |
|
★ 23:51
進捗状況(ようやくひとつ消化)
| |
| 2005/10/13 X-8 | |
|
★ 22:14
カンファレンス申し込んだ
第7回 ROBO-ONE Technical Conference 昨日の深夜に申し込みました。 参加者番号 032番。 …今の時点で 32人って…参加者少ないのかな… 前回みたく初心者向けと中級者向けの講演が混ざっていた方が人の入りはいいような… 今のROBO-ONEの状況だと、カンファレンスのターゲットをどのレベルの人にするか難しいよね。 「マジンガアの走り」と「OMINI ZEROの画像処理」は逃さず聴きたいと思ってます。 あ、他の講演に興味がないってことじゃないですよ。 --- カンファレンスにゴーレムくん連れて行くのは止めるかも。 (移動大変だし) ☆[コメント] | |
| 2005/10/12 X-9 | |
|
★ 22:14
(URLメモ)select()を利用したFIFOからの読み込みでの注意点
ひとつ前の日記に書いた「select()でFIFOから読み込んだ後、一度ファイルディスクリプタを閉じる」件、ちゃんとマニュアル(man select_tut)に載ってました。 select_tut(select tutorial)日本語訳 (JM Project) 末尾のほうにある「SELECT の掟」に 7. で示した場合を除き、 read(), recv(), write(), send() などの関数は、エラーでなければ決して 1 より小さい値を返さない。例えば、他端が死んでいるパイプに対して read() を行うと、0 が返る (end-of-file エラーと同じ) が、 しかし 0 が返るのは一度だけである (それ以降に read や write を行った場合 -1 が返る)。これらの関数が 0 か -1 を返したら、そのディスクリプタを select に二度と渡してはならない。上記の例では、そのディスクリプタをただちにクローズし、そこには -1 をセットして、それが集合に含まれ続けるのを許さないようにしている。 とあります。 今回の場合、コマンドラインから echo "command strings" > FIFO として制御コマンドを投入しているので、echo 終了時に他端が死んでしまうのでした。 そして、その後始末をせずに select() を呼ぶのですぐに戻ってきてしまうと…。 「man見ろ!」ってことですね。 ☆[コメント] | |
|
★ 17:38
(メモ)select()を利用したFIFOからの読み込み
MSP(L-Card側モーション再生プログラム)の通信処理を多重化するために BusyLoop を select() に置き換えていて気付いた(知った)のでメモ シリアルポート2つ以外に FIFO (コマンドラインから操作するために利用)を読む必要があるので、これも select() 処理に組み込み。 が、一度データを読むと select() で入力待ちしない… 「なんで??」と Googleで調べて回ったら、いつも御世話になっている「東北学院大学 工学部 機械創成工学科 ロボット開発工学」のページに到達。 「Linux Device Driver」ページ「ブロックとSelect」のサンプルプログラムに if((r==1)&&(FD_ISSET(fd,&fds))) という記述が… 早速自分のプログラムでも読み込み後に一旦閉じて開き直すようにしたら正しく動くようになりました。 ふむむ…シリアルポートは閉じなくても動いていたので判らなかったです。 これでまた一歩前進。 ☆[コメント] | |
| 2005/10/11 X-10 | |
|
★ 14:41
(録画メモ) 10/15(土) 22:00〜23:30 NHK教育「未来へのキックオフ・ロボカップ2005」
ロボットのイベント情報 〜アトリエ ロボット〜 経由 NHKオンライン ETV特集 10月15日(土)放送予定 から 「未来へのキックオフ〜ロボカップ2005から見える未来社会〜」 Yahoo TVから ETV特集 先日ハイビジョンで放送した番組 「激闘!ロボカップ2005 − 未来をひらくキックオフ −」の再編集版っぽいですね。 地上波でも見られるようで良かった。 ☆[コメント] | |
| 2005/10/09 X-12 | |
|
★ 23:40
開発環境復旧
大会後ずっと収納したままだった開発環境を復旧しました。 結局3週間何もしてないのね…(思考実験はしたけど) まずは起動スイッチ処理のシェルスクリプト作成から… …と思ったけど MSPに組みこまないとうまくいかない気がします。 ユーザプロセスを複数動かすとMSPの通信処理が間に合わない…(汗 ☆[コメント] | |
|
★ 16:38
(URLメモ)Alibre Design Xpress-無償版
吉日掲示板に書いたのでこちらにも。 「Pro/DESKTOP Express」のフリー版が無くなって以降、手軽に使える3D-CADソフトが無かったのですが、最近「Alibre Design Xpress Plus」というソフトの無償版が配布されています。 ちょっと機能制限があるようですが試してみようかと。 Alibre Design Xpress-無償版 使いかたやTIPSは「よっちゃんの無料3次元CAD Pro/DESKTOP交流の広場」が参考になります。 「まっしもアンテナ」がBBSの更新チェックをしているのでそちらも。 ☆[コメント] | |
| 2005/10/07 X-14 | |
|
★ 23:19
先週の種デス (最終回)
「えーーなにそれーー」 なラストでした。 こんなラストじゃ死んでいったキャラ達が浮かばれない… 「主人公は君なんだよ」と騙され続けたシンも可哀想。 エンディングは「キラからシンへの心情を表した歌」っていう話はいったいどこへ… うーん…無印SEEDの方がずっと良かったように思います。 --- 2005.10.07 23:30 追記 時代劇風なストーリー仕立ての本ばかり読んでいて、そういう展開に慣れてしまったせいかも… ☆[コメント] | |
| 2005/10/06 X-15 | |
|
★ 1:08
作業予定 (詳細版)
前回のはあまりにおおざっぱなので、もう少し詳細化したものを。 「御披露目」が目的なんだから操作プログラムは後回しのほうがいい? (☆は必須作業、△は余裕があれば)
「10/16に秋葉で練習会」という噂があるけど、動かせるかな… Bluetoothモジュールが流行のきざし… 3年前に買った無線モジュールは諦めて Bluetooth にしようかな… ☆[コメント] | |
| 2005/10/01 X-20 | |
|
★ 23:36
作業予定 (カンファレンスでの御披露目にむけて)
 2005.09.17 17:27 第8回リングにて (脚に付いてるのはチップ用ヒートシンク) カンファレンスでみんなに見せたいので開発続行。 作業一覧(☆印は必須&未完、◯は完了、△は余裕があれば)
(競技に参加するわけじゃないからいいんだけど) 11/26までの作業はこんな感じかな
ほりさんから指摘された足裏の改良 「素材が柔らかすぎるから5mmのABSとかで作りなおした方がいい」もやらなきゃね。 ☆[コメント] | |
|
★ 23:17
「神無月」 秋っぽくなってきました
「飽きっぽく」じゃないので注意 そろそろ網戸にして寝るのをやめないと風邪ひきそうです。 ドライブするにはいい季節。来週くらいに温泉ドライブで箱根へ行こうかな。 とりあえずカウントダウンはカンファレンスの日に設定。 でも、今回は Dash Time Trial 無さそうね。 ☆[コメント] | |
トップページ
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年