§Þ§∏§´§Î°˘•Þ•Í•™•Õ•√•»: ≥´»Ø∆¸ªÔ (2005 1Q)
TOP
2021«Ø:
1Q
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø
| 2005/03/29 X+11 | |
|
°˙
(•·•‚)•™•§•È°º≥—§»•Ì°º•Î°¢•‘•√•¡°¢•Ë°º
§»§Í§¢§®§∫∆¸µ≠§ÚΩÒ§±§Îƒ¯≈Ÿ§À§œ…¸≥Ë ¿ËΩµ§Œ°÷•Ì•Ð•√•»•–•»•Î in §“§Ë§≥≤∞°◊§« °÷•Ì°º•Î§»§œ§…§Œº¥º˛§Í§Œ≤Û≈æ§Úªÿ§π§Œ§´°◊ §»§§§¶œ√§À§ §√§ø§»§≠°¢±≥§Ú∏¿§√§øµ§§¨§∑§ø§Œ§«ƒ¥§Ÿ§∆§þ§Þ§∑§ø°£ Google§«øß°π•≠°º•Ô°º•…§Ú —§®§ƒ§ƒ∏°∫˜§∑§∆∏´§ƒ§±§ø§Œ§¨§≥§Ï ∫¬…∏ —¥π (≈ÏÀÃ≥ÿ±°¬Á≥ÿπ©≥ÿ…Ùµ°≥£¡œ¿Æπ©≥ÿ≤ RDE) (∏°∫˜•≠°º•Ô°º•…§œ°÷•™•§•È°º≥— •Ì°º•Î •‘•√•¡ •Ë°º ∫¬…∏º¥°◊) §≥§Œ•⁄°º•∏§Œ°÷•™•§•È°º≥—§»•Ì°º•Î•‘•√•¡•Ë°º°◊§À§œ §≥§Œ…Ωº®À°§œ»Ùπ‘µ°§Œª—¿™§Ú…Ω§π∫ð§À§Ë§Ø§ƒ§´§Ô§Ï∫¬…∏∑œ§ŒºË§Í ˝§À§‚§Ë§Í§Þ§π§¨°¢±Ùƒæº¥≤ۧͧڕ˰º(yaw)º¥°¢∫∏±¶§Œ∑π§≠§Ú•Ì°º•Î(roll)º¥°¢¡∞∏§Œ∑π§≠§Ú•‘•√•¡(pitch)º¥§»§§§§§Þ§π°£º÷§ §…§ŒÕ…§Ï§«§‚•Ì°º•Í•Û•∞§¿§Œ•‘•√•¡•Û•∞§¿§Œ§§§¶§≥§»§¨§¢§Í§Þ§π§¨°¢§≥§Ï§«§π°£ §»ΩÒ§´§Ï§∆§§§Þ§π°£ ¬‚ƒπ§»ª‰§Œ∞’∏´§¨§≥§Ï§«§∑§ø°£ ª≤πÕ°ßµ°¬Œ∫¬…∏∑œ§»≤Û≈æ±ø∆∞ (A-Cubed °⁄π“∂ıπ©≥ÿ§ÚΩ‰§ÎÀ¡∏±°€) §¨°¢§‚§¶§¡§Á§√§»≤º§Ú∆…§ý§»°÷•™•§•È°º≥—°◊§»§§§¶πý§¨§¢§√§∆ §Ω§≥§À§œ°ƒ Œœ≥ÿ§ §…§«§‚Ω–§∆§≠§∆∆¨§Ú«∫§Þ§π§‚§Œ§À•™•§•È°º≥—§¨§¢§Í§Þ§π°£ §»§¢§Í§Þ§π°£ •Ì°º•Î°¢•‘•√•¡°¢•Ë°º§¨•™•§•È°º≥—§¿§»ª◊§√§∆§§§ø§Œ§«§π§¨¥÷∞„§√§∆§§§Î§Ë§¶§«§π°£ §µ§È§À°¢°÷•™•§•È°º≥— •Ì°º•Î ≤Û≈溥°◊§«∏°∫˜§∑§∆∏´§ƒ§´§Î OpenGL Ÿ∂Ø≤ÒÕ— ªÒŒ¡§Œ•⁄°º•∏ §Œ°÷∞Ã√÷ª—¿™§ŒªÿƒÍ ˝À°°◊§»§§§¶πý§À§≥§Û§ µ≠Ω“§¨ •™•§•È°º≥— —¥π§À§œ¬Á§≠§Ø§Ô§±§∆2ºÔŒý§¢§Í§Þ§π°•Œ„§®§–æµ≠§Œz-y-zº¥§Þ§Ô§Í§Œ —¥π§¨§Ω§Œ∞ϧƒ§«°§2ºÔŒý§Œ≤Û≈溥§Ú¡»§þπÁ§Ô§ª§∆§§§Þ§π°•∞Ï ˝°§¡∞Ω“§∑§ø•ð•“•Þ•π•ª•Û•µ§«§œ•™•§•È°º≥—§»§∑§∆z-y-xº¥§Þ§Ô§Í§ÚÕ¯Õ—§∑§∆§™§Í°§3ºÔŒý§Œ≤Û≈溥§Ú¡»§þπÁ§Ô§ª§∆§§§Þ§π°•§…§Œº¥§Úª»§¶§´§œÕ—≈”§À§Ë§√§∆§§§Ì§§§Ì§«§π°• •ÿ•«•£•Û•∞°¢•‘•√•¡°¢•–•Û•Ø§√§∆§§§¶§Œ§œ 𧧧ø§≥§»§¢§Î§Ë§¶§ °ƒ §«§‚°¢∏∆§”Ã槨 —§Ô§√§∆§‚•Ì°º•Î§œxº¥§Þ§Ô§Í§þ§ø§§°£ ∑Î∂…°¢¥÷∞„§√§ø¿‚ÿ§œ§∑§ §´§√§ø°ƒ§Œ§´§ °©°© °˘[•≥•·•Û•»] | |
| 2005/03/23 | |
|
°˙
¬Œƒ¥…‘Œ…§Œ§ø§·∆¸µ≠ππø∑§™µŸ§þ§∑§Þ§π
¬Œ≤π¬¨§Î§» 36≈Ÿ9 ¨§√§∆Ω–§Î§Û§«§π§¨°¢¬Œ≤π∑◊≤ı§Ï§∆§Î§Û§∏§„§ §§§´§»°ƒ Œ¡Õ˝∫ӧε§Œœ§ §Ø§ §√§∆§‚¬ÁæÊ…◊§ §Ë§¶§À°¢µ¢¬≈”√ʧ«øß°π§ ø©… §Úƒ¥√£∫—°£ ΩµÀˆ§Þ§«∆¸µ≠ππø∑§‰•·°º•Î§Œ ÷ªˆ§œ§∑§ §§§´§‚°£ °˘[•≥•·•Û•»] | |
| 2005/03/22 | |
|
°˙
∫Ú∆¸§Œ§™«„ ™ (≈≈ª“•≥•Û•—•π°¢SD•´•ø•Ì•∞°¢•Ì°º•º•Û•·•§•«•Û£≤°¡£¥¥¨)
¬Œƒ¥≤Û…¸§∑§∆§ §§§Œ§Àª≈ªˆ§¨ƒπ∞˙§§§∆§·§√§¡§„»Ë§Ï§∆§§§Î§Œ§«æÐ∫Ÿ§œ∏§« (22:26∏Ω∫þ§«§Þ§¿≤Òº“) °˘[•≥•·•Û•»] | |
| 2005/03/20 X+1 | |
|
°˙
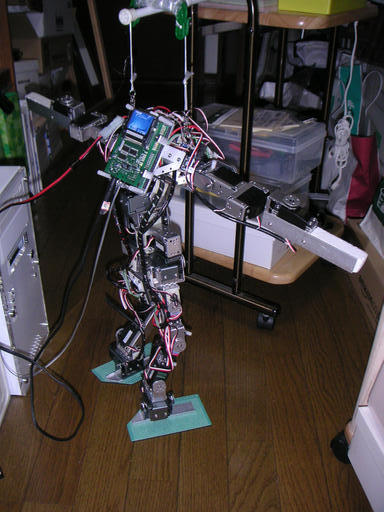
•¡•„•Û•‘•™•Û•Ÿ•Î•»≥§§Ú≈œ§Î
 À˛∞˜§Œ¬Á∑ø•π•Ø•Í°º•Û¡∞  ∑Ëæ°¿Ô  …Ω楺∞ ¡·§·§ŒøÁÃ≤§»…˜ºŸÃÙ§»±…ÕЕ…•Í•Û•Ø§Œ§™§´§≤§«…¸≥Ë°£ ≈≈º÷§œ§‰§·§∆º÷§«≤Òæϧÿ°£ §§§ƒ§‚§œ≤ ≥ÿçÕË¥€∏˛§´§§§ŒπÒ∫ð∏ÚŒÆ≤Ò¥€§Œ√Ûº÷æϧÀ∆˛§Ï§∆§§§ø§Œ§¿§±§…°¢∫£≤Û§œÀ˛º÷°£ ≤ ≥ÿçÕË¥€§À∆˛§√§∆§þ§Î§»°¢¬Á∑ø•«•£•π•◊•Ï•§§Œ¡∞§‚À˛∞˜°£ §¶°º§Û°ƒ§≥§Ï§√§∆§‰§√§—§Í•Ô°º•Î•…°˘•Ï•≥°º•∫∏˙≤ð© ≈˛√§∑§ø§Œ§œ 12:00 ≤·§Æ§¿§√§ø§Œ§«£±≤Û¿Ô°¢£≤≤Û¿Ô§œ∏´§È§Ï§Þ§ª§Û§«§∑§ø°£ ∑Ëæ°¿Ô§œ•Ë•≥•≈• •∞•Ï°º•»…‘√Œ≤–§Ú≤º§∑§ø TAEKWON-V§»°¢ ø»ƒπ70cm,¬ŒΩ≈8Kg§ŒMYRO2§Ú≤º§∑§ø •∞•Ï°º•»•Þ•∏•Û•¨•¢§Œ¬–¿Ô (∆¸¥⁄•Þ•∏•Û•¨°º¬–∑Ë:æ–) ¿Ð¿Ô§Ú¿©§∑§ø§Œ§œ TAEKWON-V§«§∑§ø°£ ª≤≤√º‘°¢∞—∞˜≤Ò°¢¥ÿ∑∏º‘§Œ§þ§ §µ§Þ§™»Ë§Ï§µ§Þ§«§∑§ø°£ »Ù¬Õπ‚ª≥§Œ¬Ë£∏≤ÛROBO-ONE (9/17,18)§«§™≤Ò§§§∑§Þ§∑§Á§¶°£ --- ∞Ï≈ŸΩÀæ°≤Ò§Àπ‘§√§∆§þ§ø§§§Œ§«§π§¨°¢∫£≤Û§‚§´§ §Ô§∫°ƒ(T-T °˘[•≥•·•Û•»] | |
| 2005/03/19 X+0 | |
|
°˙
ROBO-ONEÕΩ¡™≈ˆ∆¸
 §ø§Ã§ø§ÃG§»∞ÏΩÔ§À √Ì) º´ ¨§Œ§≥§»§∑§´ΩÒ§§§∆§Þ§ª§Û°£ÕΩ¡™≤ÒæϧŒ ∑∞œµ§§Ú√Œ§Í§ø§§ ˝§À§œ¿–¿Ó§µ§Û§Œ°÷ª◊§§Œ©§√§ø§¨µ»∆¸°◊§Œ 2005/03/19 §Œ∆¸µ≠§¨§™¡¶§·°£ §¢§»°¢ §¶§∏§µ§Û§¨æ“≤§∑§∆§§§Î sn§µ§Û§Œblog°÷ª∂∫‚ø¥Õ˝≥ÿº¬Ω¨π÷µ¡200X°◊§‚§™¡¶§·§«§π°£ (2005.03.21 08:40 ƒ˚¿µ) §¶§∏§µ§Û§«§œ§ §Ø sn§µ§Û§Œblog§«§∑§ø°£§π§þ§Þ§ª§Û √ŸπÔ§∑§ §§§Ë§¶§À 7:30§ÀÃÐ≥–§∑≥𧱧∆§ø§Œ§À°¢•Ÿ•√•…§´§ÈΩ–§È§Ï§ø§Œ§œ 8:00≤·§Æ°ƒ (¥¿ ø»ªŸ≈Ÿ§Ú§∑§ƒ§ƒ°¢VAIO§Ø§Û§ŒCygwin@Win2K §ÿ•Ø•Ì•π•≥•Û•—•§•Î§À…¨Õ◊§ §‚§Œ§Ú•≥•‘°º (ÕΩ¡€ƒÃ§Íª»§Ô§ §´§√§ø) º÷§«π‘§Ø§»∫©ø∆≤Ò§«∞˚§·§ §§§Œ§«°¢JR§»§Ê§Í§´§‚§·§Úæ˧Í∑—§§§«≤ ≥ÿçÕË¥€§ÿ°£ ≈˛√§∑§ø§Œ§œ 11:00≤·§Æ°£ºı…’§œƒ¸§·°£ (º¬§œ√Ÿ§Ï§∆§‚ºÃøøª£±∆§∑§∆§‚§È§®§ø§Œ§´§‚°ƒ) ª≤≤√º‘𵧮ºº§œ£±«Ø¡∞§Œ1.5«Ð§Ø§È§§§À≥»§¨§√§∆§Þ§∑§ø§±§…°¢§Ω§Ï∞ æ§Àª≤≤√º‘§¨¬ø§´§√§øµ§§¨§∑§Þ§π°£ º´ ¨§Œ≤Ÿ ™§Ú√÷§§§ø§È°¢§Þ§∫∞Ï»÷≤Ò§§§ø§´§√§ø°÷•·•´•»•Ì¿ÁΩ—°◊§Œ°÷§ø§Ã§ø§ÃG°◊§Œ§»§≥§ÿ §¶§≠§„°º§´§Ô§§§§§£§£§§ §≥§Œ§Þ§Þ§™ª˝§¡µ¢§Í§∑§ø§´§√§ø§Œ§¿§±§…°¢§Ω§Û§ §≥§»§œª∫§þ§Œø∆§¨¿‰¬–µˆ§µ§ §§°£ º°§œ°¢°÷§≥§Ω§≥§Ω√ƒ •Ì•Ð•√•»≤ð°◊§Œ §Œ§ý§ý§µ§Û§Œ§»§≥§Ì°£ AMATERAS§œ§¡§„§Û§»ª≈槨§√§∆§Þ§∑§ø°£ §ý°º§Û°ƒ§ §Û§«°¢§þ§Û§ §Ω§Û§ §Àπ©∫Ó¡·§§§Û§«§∑§Á§¶§´°ƒ ª‰§‚¡·§Ø∆∞§ØøÕ∑¡§¨Õþ§∑§§°£ ∆∞§Ø§Œ§Ú∏´§È§Ï§ §´§√§ø§Œ§»ºÃøø§Úª£§È§ §´§√§ø§Œ§¨ªƒ«∞°£ §Ω§Œ∏°¢°÷•Ì•Ð•√•»§Œ§´§…§√§≥°◊§Œ•¢•π•´§µ§Û§Œ§»§≥§ÿ°£ ¿Ω∫Ó∆¸µ≠§Œ∆‚Õ∆§´§È°÷§‚§∑§´§∑§∆Ω˜¿≠√±∆»ª≤≤√°©°◊§»ÕΩ¡€§∑§∆§§§ø§Œ§«§π§¨°¢§‰§œ§Í§Ω§ŒƒÃ§Í§«§∑§ø°£ KHR-1§Œ∆¨§À•´•·•È§¨…’§§§∆§§§∆°¢±«¡¸§œ≈≈«»§«HMD(•Ω•À°º§Œ•∞•È•π•»•Ì•Û)§ÿ°£ §µ§È§À°¢HMD§À§œ•∏•„•§•Ì§¨…’§§§∆§§§∆°¢¡ýΩƒº‘§¨∆¨§Úø∂§Î§»°¢KHR-1§‚ºÛ§Úø∂§Î§»§§§¶•Þ•π•ø°º•π•Ï°º•÷°£ §≥§Ï§Ú•Þ•∏•Û•¨•¢§À…’§±§ø§È≥⁄§∑§§§¿§Ì§¶§ °º §ø§¿§∑•Ì•Ð§¨≈æ≈ð§π§Î§»¡ýΩƒº‘§¨ø»¬Œ§Œ•–•È•Û•π§Úº∫§¶≤ƒ«Ω¿≠§¨°ƒ(¬Ë£≤≤Û¬Á≤Ò§«º¬∫ð§À§¢§Í§Þ§∑§ø) ∏Ω∫þ§œ°¢RCB-1§Œµ°«Ω§Œ¿©∏¬§«°¢ ‚§≠§ §¨§ÈºÛ§Úº´Õ≥§Àø∂§Î§≥§»§œ§«§≠§ §§§Œ§¿§±§…°¢ø∑∑ø§Œ•‚°º•∑•Á•Û•◊•Ì•ª•√•µ°º§ §Èµºª˜•Þ•Î•¡•ø•π•Ø§Úª»§√§∆º¬∏Ω§«§≠§Î§Œ§«§œ§ §§§«§∑§Á§¶§´°£ ∫£∏§Œ≈∏≥´§À√ÌÃа£ §Ω§Œ∏§‚¬æ§ŒøÕ√£§Œ•Ì•Ð§ŒπΩ¬§§Ú∏´§ª§∆§‚§È§√§ø§Í§∑§∆§§§Þ§∑§ø°£ (§þ§ §µ§Þ§§§ƒ§‚∫Ó∂»§ŒºŸÀ‚§–§´§Í§∑§∆§π§þ§Þ§ª§Û) §Ω§Û§ § §´°¢¡∞Ω“§Œµ»∆¸§Œ¿–¿Ó§µ§Û§´§È °÷§ §Û§´§Õ§ß°¢•¥°º•Ï•ý§Ø§Û§»§®§Û§—§Ø§œ°ÿ∆∞§´§ §§§Œ§«Õ≠Ãæ§ •Ì•Ð•√•»°Ÿ°ÿROBO-ONE≥¶§Œ•µ•∞•È•¿°¶•’•°•þ•Í•¢°Ÿ§√§∆§≥§»§«Õ≠Ãæ§À§ §√§¡§„§√§∆§Î§þ§ø§§§«§π§Ë°◊§»§§§¶œ√§Ú π§Ø °÷§…§√§¡§¨¿Ë§À∆∞§Ø§Ë§¶§À§ §Î§´§«≈“§±§À§ §√§∆§Î°◊§»§‚ § °¢§ §Û§¿§√§∆°º°™ ¶≤('o'; §®§Û§—§Ø§»»Ê§Ÿ§È§Ï§Î§ §Û§∆ø¥≥∞§¿§° (±≥°ß§¥§·§Û§Õ¿–¿Ó§µ§Û §≥§¶§ §√§ø§Èº°≤Û¬Á≤Ò§«§œπ¯¥ÿ¿·£≥º¥§Úõ§Ø§∑§∆§«§‚ÕΩ¡™§ÀΩ–§∆§‰§Î°º°º°º §»¿¿§§§ƒ§ƒ∫©ø∆≤Ò§ÿ°£ (∫©ø∆≤Ò§œæ Œ¨) ÃµÕ˝§¨§ø§ø§√§ø§Œ§´°¢ÃЧŒƒÀ§þ§»…°§Œ…‘ƒ¥§À≤√§®§∆∆¨ƒÀ§Þ§«§«§∆§≠§ø§Œ§«°¢∆Ûº°≤Ò§œƒ¸§·§∆§µ§√§µ§»µ¢¬°£ °ƒ§√§∆ ≤÷ ¥æ…§∏§„§ §Ø§∆…˜ºŸ§“§§§∆§Û§∏§„§Û«œºØ°™ --- §¢°¢§Ω§¶§§§®§– Linux¡»°¢PIC¡»§ŒøÕ√£§»œ√§Ú§π§Î§ŒÀ∫§Ï§∆§Þ§∑§ø°ƒ (¥¿ §Ω§Œ§¶§¡°¢•¢•Û•∆• §À•´•∆•¥•Í∫Ó§Í§Þ§π°£ °˘[•≥•·•Û•»] | |
| 2005/03/18 (ROBO) Xdayƒæ¡∞ | |
|
°˙
X-10h ∫£≤Û§‚¥˛∏¢§∑§Þ§π°ƒ
| |
|
°˙
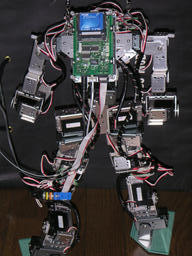
Xdayƒæ¡∞ø ƒΩ Ûπ•®•Û•»•Í
∫Ú∆¸ÃµÕ˝§∑§∆≤Òº“π‘§√§ø§ª§§§«¬Œƒ¥•Ð•Ì•Ð•Ì§«§π°£ ÃµÕ˝§π§Î§Œ§œ§‰§·§∆°¢≤ÒæϧÀ•¥°º•Ï•ý§Ø§Û§Úœ¢§Ï§∆𑧱§Îƒ¯≈Ÿ§Àª≈æ§≤§Þ§π°£ 11:00-11:30 ¬≠Œ¢•µ•§•∫ΩÃæÆ (∫«¬Áƒπ¿©∏¬§Ú5mm•™°º•–°º§∑§∆§ø§Œ§«) 12:00- ¬≠ºÛ•µ°º•Ð§œ•Ì°º•Î°¢•‘•√•¡Œæ ˝§»§‚§™»Ë§Ï§ŒÃœÕÕ ∏Ú¥π§∑§ §§§» ‚§±§Ω§¶§À§ §§°£ 13:00- •–•√•∆•Í°º•—•√•Ø∫Ó¿Æ°ı•π•§•√•¡Œý«€¿˛≥´ªœ 15:00- •–•√•∆•Í°º•±°º•π§Ú∂ª…ٕЕ«•£§´§È≥∞§Ω§¶§»§∑§ø§È•Õ•∏§Œ∆¨§Ú§ §·§¡§„§√§ø º÷∫Ðπ©∂Ò§Œ•⁄•Û•¡§Úª˝§√§∆§≠§∆ÃµÕ˝ÃÕ˝≥∞§∑§Þ§∑§ø°£ (2ª˛¥÷∂·§Øõ¬Ã§À°ƒ) 21:00- §Þ§¿°¢•œ•Û•¿…’§±∫Ó∂»√Ê°ƒ •œ•Û•¿…’§±§¨§·§¡§„§·§¡§„≤ººÍ§À§ §√§∆§Þ§π°£ 23:00- ª˛¥÷¿⁄§Ï°ƒ ∑Î∂…°¢≈≈µ§π©∫Ó§¿§±§«∞Ï∆¸ª»§√§∆§∑§Þ§√§ø°ƒ §Ω§Ï§«§‚°¢§Þ§¿º´Œß∆∞∫Ó≥´ªœÕ—•π•§•√•¡§¨§¢§Í§Þ§ª§Û°£ °˘[•≥•·•Û•»] | |
| 2005/03/16 X-2 | |
|
°˙
•–•∞FIX¥∞Œª (ø ƒΩ°ßMSC 75%°¢¬æ —§Ô§È§∫)
∑Î∂…°¢10¶Ãsec∫π§Œª˛§»∆±§∏ ˝À°§«∆®§≤§Þ§∑§ø°ƒ ¬ÂΩ˛§»§∑§∆•∑•Í•¢•ÎƒÃøÆ§Ú 57.2Kbps§Ë§Í¬Æ§Ø§«§≠§ §Ø§ §Í§Þ§∑§ø°£ §‰§√§—§Í I2C §À§π§Ÿ§≠§´§ °ƒ (§…§Û§ •Ì•∏•√•Ø§ §Œ§´§œ¬Á≤Ò∏§À§«§‚∏¯≥´§∑§Þ§π) §¢°¢º°§Œ•–°º•∏•Á•Û§¨§«§≠§ø§ÈµÏ•–°º•∏•Á•Û§Ú•™°º•◊•Û•Ω°º•π≤Ω§π§Î§Œ§¨§§§§§´§ °£§Ω§Ï§¿§»°¢∏¯≥´§œ£µ∑ӧاȧ§°© °˘[•≥•·•Û•»] | |
|
°˙
MSC•–•∞»Ø≥– (ø ƒΩ°ßMSC 65% ¬æ —§Ô§È§∫)
§≥§Œª˛≈¿§«Ω–§Þ§π§´°ƒ °≤|°±|¢˛ ∆±§∏•ð°º•»§Œ•‘•Û§À≥‰§Í≈ˆ§∆§ø•µ°º•Ð§ŒPWM§Œ∫π§¨20¶Ãsec§Œª˛§À∏Ì∆∞∫Ó°£ 10¶Ãsec∫π§ŒæÏπÁ§œ∏»¬©§ ºÍ√ §«∆®§≤§È§Ï§ø§Û§¿§±§…°ƒ ∫£≈Ÿ§œ§…§¶§‰§√§∆∆®§≤§Ë§¶§´°£ (MSC§Œø ƒΩ§œ -10% §µ§Ï§Þ§∑§ø) °˘[•≥•·•Û•»] | |
|
°˙
§Ø§∏§±§Ω§¶§«§π°ƒ (ø ƒΩ°ß3/11§´§È§€§»§Û§… —≤Ωõ§∑)
∫£≤Û§œ§´§ §Í¬ø§Ø§Œ§‚§Œ§Úµæ¿∑§À§∑§∆∫Ó∂»§∑§ø§Œ§À°ƒ §Þ§ø¥÷§ÀπÁ§§§Ω§¶§À§¢§Í§Þ§ª§Û°£ §‰§√§—§Í°÷µªΩ—º‘§Œ§≥§¿§Ô§Í°◊§Úµæ¿∑§À§∑§ §§§»•¿•·§ §Œ§´§ °ƒ §«§‚°¢§Ω§Ï§¿§»§‰§Îµ§§Úõ§Ø§∑§Ω§¶§«§π°£ 2004/10/30ª˛≈¿§Œ§‰§Î§≥§»•Í•π•»§œ§´§ §Íæ√≤Ω§∑§ø§Û§¿§±§…§Õ°£ °˘[•≥•·•Û•»] | |
| 2005/03/15 X-3 | |
|
°˙
∫Ú∆¸§Œ§™«„ ™(•»•È•Û•∏•π•øµªΩ—£¥∑ÓπÊ)
(•Í•Û•Ø¿Ë§œCQΩ–»«)
 •»•È•Û•∏•π•øµªΩ— 2005«Ø4∑ÓπÊ ΩҧاŒ§ÚÀ∫§Ï§∆§Þ§∑§ø°£ §…§¶§π§Î§´Ã¬§√§∆§ø§±§…§»§Í§¢§®§∫∞Ï∫˝πÿ∆˛°£ •»•È•Û•∏•π•øµªΩ— 2005«Ø4∑ÓπÊ (CQΩ–»«) …’œø§Œ R8C/15 §œ•∑•Í•¢•Î§¨§“§»§ƒ§∑§´Ãµ§§§Œ§¨ªƒ«∞°£ •«•–•√•∞Õ—§Œ•ð°º•»§œ•Ω•’•»•¶•ß•¢¿©∏ʧ §Œ§´§ °ƒ ∑Î∂…µÓ«Ø§Œ…’œø§Œ H8Tiny§œ§Þ§√§ø§Øø®§√§∆§Þ§ª§Û°£√ا´Õþ§∑§§§“§»§§§Þ§π°© °˘[•≥•·•Û•»] | |
|
°˙
§¶§¶°ƒ∫Ó∂»ª˛¥÷ºË§Ï§ §§
§ §Û§«§≥§¶¬Á≤Òƒæ¡∞§Àª≈ªˆ§¨Àª§∑§Ø§ §Î§´§ °ƒ (¡∞∆¸µŸ§‚§¶§»§π§Î§´§È°©) §≥§Œ§Þ§Þ§¿§»∂‚ÕÀ∆¸µŸ§·§ §§ÕΩ¥∂°£ §¢°¢œ”¿Ë§œ∆∞§Ø§Ë§¶§À§ §Í§Þ§∑§ø°£ °˘[•≥•·•Û•»] | |
| 2005/03/13 X-5 | |
|
°˙
(•·•‚)GNU extention function asprintf()
C§Œ•◊•Ì•∞•È•þ•Û•∞¥∞¡¥§ÀÀ∫§Ï§∆§Þ§π°ƒ¬Á —§«§π°£ ≤ø§Œ§ø§·§À Linux §Ú«ÿ√ʧÀ«ÿ…ȧԧª§∆§Î§Û§¿§´°ƒ IRC§À°÷ ∏ª˙ŒÛ¡ý∫ÓÀ∫§Ï§ø°º°◊§»ΩÒ§§§ø§È °÷asprintf §»§´ª»§®§–°º°©°◊§»§§§¶Ωı∏¿§¨°£ man asprintf §∑§∆§þ§Î§» §’§ý°º°¢sprintf §π§Î§»§≠§À氺ͧÀ malloc §∑§∆§Ø§Ï§Î§Œ§Õ°£ ÿÕ¯§Ω§¶°£ §«§‚§«§‚°¢∫£§œ§‚§¶§Ω§Ï§Ú≤±§®§ÎÕæÕµ§‚õ§§§Œ§«°¢static §À¿Î∏¿§∑§øchar«€ŒÛ§«∆®§≤§Þ§π°£ §®°©ø ƒΩ§…§¶§ §√§∆§Î§Œ§´§√§∆°©°© §Þ°¢§Þ§¿•¥°º•Ï•ý§Ø§Û§Ú∆∞§´§ª§∆§ §§§«§π°£ œ”¿Ë§π§È∆∞§§§∆§Þ§ª§Û°£ °˘[•≥•·•Û•»] | |
| 2005/03/11 X-7 | |
|
°˙
§Þ§¿§Þ§¿§‰§Î§≥§»ª≥¿—§þ (ø ƒΩ°ßMSC 75%°¢MSP 30%, §Ω§Œ¬æ 0%)
µ◊§∑§÷§Í§À¡·§Øµ¢¬§∑§ø§Œ§«∫Ó∂»§¨ø §þ§Þ§∑§ø°£ 2/21§´§È»Ê§Ÿ§∆ MSP§Œø ƒΩ§¨15%•¢•√•◊ (§Ω§Ï§«§‚ÕΩƒÍ§´§È§œ§´§ §Í√Ÿ§Ï§∆§Þ§π°ƒ) L-Card槌C§Œ•◊•Ì•∞•È•ý§´§È∏ƒ°π§Œ•µ°º•Ð§Œ≥—≈Ÿ§Ú¿©∏ʧ«§≠§Î§Ë§¶§À§ §Í§Þ§∑§ø°£ §¢§»§œ•‚°º•∑•Á•Û•π•Ø•Í•◊•»§Œ∆…§þπ˛§þΩËÕ˝§»∫∆¿∏ΩËÕ˝§Ú¡»§·§–•¥°º•Ï•ý§Ø§Û§Ú∆∞§´§ª§Î§Ë§¶§À§ §Î°ƒ§»ª◊§§§Þ§π°£ ¿µ≥Œ§ ªƒ§Íª˛¥÷§œ £∑∆¸§»£≥£≥ª˛¥÷ (£∏∆¸§»£πª˛¥÷§»§‚) °ƒ§√§∆§¢§Ï§√°©ª≤≤√ªÒ≥ ø≥∫∫§√§∆ 10:30 §Þ§«°© °˘[•≥•·•Û•»] | |
| 2005/03/09 X-9 | |
|
°˙
(œø≤Ë•·•‚) 3/13 13:30-14:00, 18:55-20:54 ∆¸•∆•Ï •Ô°º•Î•…•Ï•≥°º•∫•π•⁄•∑•„•Î
§™√„§Œ¥÷§À∫«ø∑§Œ•Ì•Ð•√•»•–•»•Î§Ú≈¡§®§∆§≠§ø•Ô°º•Î•…°˘•Ï•≥°º•∫§‚∫£≈Ÿ§«∫«Ω™≤Û ª£§Í∆®§∑§ø§Í§∑§ §§§Ë§¶§À crontab §Ú≥Œ«ß Yahoo! TV§´§È •Ô°º•Î•…•Ï•≥°º•∫SP(»Î)Œ¢¬¶SP 3∑Ó13∆¸° ∆¸°À13:30°¡14:00°°∆¸ÀЕ∆•Ï•” •Ô°º•Î•…°¶•Ï•≥°º•∫∑ð«ΩøÕ•…•Í°º•ý•Þ•√•¡ Àէȧ‚¿§≥¶∞ϧÀ§ §√§∆§§§§§«§π§´•π•⁄•∑•„•Î[∫«Ω™≤Û] 3∑Ó13∆¸° ∆¸°À18:55°¡20:54°°∆¸ÀЕ∆•Ï•” °˘[•≥•·•Û•»] | |
| 2005/03/06 X-12 | |
|
°˙
∫Ú∆¸§Œ§™«„ ™ (•¢•Î•§•Û•≥ DM-330MV)
•´°º•Õ•Î§ŒΩҥ𧮧‚§«§≠§ø§≥§»§¿§∑°¢§Ω§Ì§Ω§Ìª»§®§Î§´§ °ƒ§√§∆§≥§»§« •¢•Î•§•Û•≥§Œ32A∞¬ƒÍ≤Ω≈≈∏ª DM-330MV§Ú«„§§§Þ§∑§ø°£ °÷•Ì•Ð•ƒ•Ø°™°◊§«§Œ §®§Þ§Œ§Û§µ§Û§Œ•≥•·•Û•»§Úª≤πÕ§À °÷¿–∏∂¥Î≤Ë°◊§´§È•‰•’°º•™°º•Ø•∑•Á•Û§«ÕÓª•°£ ∫£Ωµ√ʧÀ§œ∆œ§Ø§Œ§´§ °© °ƒ§»ΩÒ§§§∆§Þ§π§¨°¢§ƒ§§§À…˜ºŸ§Ú§“§§§ø§Ë§¶§«∫£∆¸§œ∫Ó∂»§«§≠§Ω§¶§À§¢§Í§Þ§ª§Û°£ ∂‚ÕÀ∆¸§À∞Ï∆¸§™µŸ§þ§∑§∆≤Û…¸§∑§∆§§§ø§Œ§¿§±§…°¢§÷§Í ÷§∑§∆§∑§Þ§§§Þ§∑§ø°£ °÷£≤Ωµ¥÷ø ƒΩ§ §∑§¿§Ë§©§©§©§©§©°™°™¥÷§ÀπÁ§Ô§ §§§´§‚°ƒ°◊ °˘[•≥•·•Û•»] | |
| 2005/03/04 X-14 | |
|
°˙
(•·•‚)L-Card+2M §À L-Card+16M§Œ•´°º•Õ•Î§Ú∆˛§Ï§Î ˝À°
 •¥°º•Ï•ý§Ø§Û§Œ«ÿ√ʧÀ…’§§§∆§§§ÎL-Card+2M §¶§Þ§Ø§§§≠§Þ§∑§ø°£ §‰§√§—§ÍRAM槌≈∏≥´æÏΩͧ¨∞„§¶§¿§±§þ§ø§§§«§π°£ §ø§¿§∑°¢∆±§∏§≥§»§Ú§‰§√§∆µØ∆∞§«§≠§ §Ø§ §√§∆§‚ª‰§œ¿’«§§Ú§»§Í§Þ§ª§Û°£
º¬∫ð§À§œ 6. §« flash-ROM§ÀΩҧا»§≠§À L-Card+16M§»∆±§∏§ØDist_ADDR: bfd00000 §À§∑§∆§‚∆∞§Ø§Ë§¶§ µ§§¨§∑§Þ§π°£ (§Ω§ŒæÏπÁ§œ•´°º•Õ•Î•—•È•·°º•ø§Œ SRC_ADDR: §Ú $bfd00000 §À —ππ) ¡∞≤Û§¶§Þ§ØµØ∆∞§«§≠§ §´§√§ø§Œ§œ∆‚¬¢•‚•À•ø§Œ•–°º•∏•Á•Û§¨∞„§√§∆§§§Î§Œ§¨∏∂∞¯§´§‚§∑§Ï§Þ§ª§Û°£ L-Card+2M §«§œ•´°º•Õ•Î•§•·°º•∏≈桘ƒæ∏§À Entry Address§À•∏•„•Û•◊§∑§∆§‚∆∞§´§ §§§Ë§¶§«§π°£ §Þ§ø°¢flash-ROM§ÿ§ŒΩÒ§≠π˛§þƒæ∏§À X•≥•Þ•Û•…§Úº¬π‘§∑§∆§‚µØ∆∞§«§≠§ §§§Œ§«√Ì∞’°£ ΩÒ§≠π˛§þΩ™Œª∏§œ∞Ï≈Ÿ≈≈∏ª§Ú¿⁄§√§∆°¢∫∆≈Ÿ≈≈∏ª§Ú∆˛§Ïƒæ§π…¨Õ◊§¨§¢§Í§Þ§∑§ø°£(•Í•ª•√•»•Ð•ø•Û≤°≤º§«§‚•¿•·) --- •´°º•Õ•Î•—•È•·°º•ø§Œ DIST_ADDR §œ DEST_ADDR §¨¿µ§∑§§§»ª◊§¶§Œ§¿§±§…°¢•‚•À•ø§Œ…Ωº®§¨§Ω§¶§ §√§¡§„§√§∆§Î§Û§«§π°£ ª‰§Œ∆˛Œœ•þ•π§«§œ§¢§Í§Þ§ª§Û°£ °˘[•≥•·•Û•»] | |
| 2005/03/02 X-16 | |
|
°˙
L-Card+16M §» L-Card+2M §Œ•´°º•Õ•Î
∫£°¢•∆•π•»¥ƒ∂≠§«ª»§√§∆§§§Î§Œ§œ°¢√ŒπÁ§§§´§Èº⁄§Í§∆§§§Î L-Card+16M •¥°º•Ï•ý§Ø§Û§Œ«ÿ√ʧÀ§Ø§√§ƒ§§§∆§Î§Œ§œ°¢§§§ø§¿§≠§‚§Œ§Œ L-Card+2M Flash-ROM §Œ•µ•§•∫∞ ≥∞§œ∆±§∏§ §Û§¿§´§È°¢§‚§∑§´§∑§ø§È∆±§∏•´°º•Õ•Î§¨∆∞§Ø§´§ §°°ƒ§»ª◊§√§ø§Œ§¿§±§…°ƒ §‰§√§—§Í•¿•·§«§∑§ø°£ o(T-T)o º¬π‘ª˛§À•´°º•Õ•Î§Ú«€√÷§π§Î•¢•…•Ï•π(µØ∆∞ª˛§Àflash-ROM§´§ÈRAMæ§À≈桘§µ§Ï§Î)§¨§¡§Á§√§»§¿§±§∫§Ï§∆§§§Î§Œ§«°¢ °÷•‚•À•ø§´§È•∏•„•Û•◊§π§Î•¢•…•Ï•π§µ§® —§®§Ï§–∆∞§Ø§´§‚°ƒ°◊ §»ª◊§√§ø§Œ§«§π§¨°¢§Ω§Û§ §À¥ √±§ §‚§Œ§«§œ§ §µ§Ω§¶°ƒ §≥§Œƒ¥∫∫§À§§§Ì§§§Ìª˛¥÷§Ú§´§±§Î§Œ§‚§‚§√§ø§§§ §§§Œ§«°¢L-Card+2MÕ—§Œ•´°º•Õ•ÎπΩ√€¥ƒ∂≠§Ú∫ӧΧ≥§»§À§∑§Þ§π°£ °˘[•≥•·•Û•»] | |
|
°˙
∫£∆¸§Œ§™«„ ™ (•Ì°º•º•Û•·•§•«•Û°¢•Þ•∆•Í•¢•Î• •§•»°¢∫ñ¿πÒ ™∏Ï)
…˜ºŸÃÙ§Ú«„§¶§ø§·§À¥ð∞ʧÀ¥Û§√§ø§œ§∫§ §Œ§À°¢§ §º§´ÀÐ≤∞§Œ•’•Ì•¢§ÿ «„§√§ø§Œ§œ
•Ì°º•º•Û•·•§•«•Û§œ§»§Í§¢§®§∫£±¥¨§¿§±«„§√§∆§þ§ø°£ °ƒ§√§∆°¢Ãëڧ§§∏§„§Û°™ ¬Á≤Ò§¨Ω™§Ô§√§ø§È£¥¥¨§Þ§««„§™§√§»°£∫£«„§¶§Œ§œ¥Ì∏±§¿§´§È°ƒ('-';; °˘[•≥•·•Û•»] | |
|
°˙
L-Card•´°º•Õ•Î∆˛§Ï¥π§®¿Æ∏˘ (ø ƒΩ°ß2/21§´§È —≤Ω§ §∑)
 MSP, MSC •∆•π•»¥ƒ∂≠ §Ë§¶§‰§ØƒÃøÆ√Ÿ±‰¬–∫ˆ»«•´°º•Õ•Î§ÿ§Œ∆˛§Ï¥π§®§¨¥∞Œª§∑§Þ§∑§ø°£ (∫£§œ§Þ§¿ flash-rom §ÀΩÒ§´§∫§À•™•Û•·•‚•Í§«∆∞§´§∑§∆§§§Þ§π) §≥§Œ§ø§·§À∞ÏΩµ¥÷§´§±§øπ√»Â§¨§¢§√§∆°¢PIC§´§È§Œ20msec§Œ•·•√•ª°º•∏§Àƒ…§§…’§Ø§Ë§¶§À§ §√§ø°ƒ§Ë§¶§«§π°£ (§‚§¶§¡§Á§√§»ÕÕª“∏´§ø ˝§¨§§§§§´§‚) ÿ∆¸§´§È§œ•¥°º•Ï•ý§Ø§Û§À≈Î∫Ч∑§ø L-Card+2M §«º¬µ°•∆•π•»§«§π°£ °˘[•≥•·•Û•»] | |
|
°˙
(•·•‚)L-Card+16M •´°º•Õ•ÎΩҥ𧮠˝À°
•´°º•Õ•Î§Œ∫∆πΩ√€§Þ§«§œ¥ √±§ÀΩ™§Ô§√§ø§Œ§¿§±§…°¢•´°º•Õ•Î§ŒΩҥ𧮧¨¿Æ∏˘§π§Î§Þ§«§À°¢ªƒ§Í∆¸øÙ§Œ 1/3 §Ú»Ò§∑§∆§∑§Þ§§§Þ§∑§ø°£(¥¿ §Ω§‚§Ω§‚°¢•§•Û•π•»°º•ÎCD§À∆˛§√§∆§§§Î§Œ•´°º•Õ•Î§Ú FlashROM §ÀΩÒ§≠π˛§ý ˝À°§¨§Ô§´§È§ §§°ƒ °ƒ§√§∆§§§¶§´°¢§…§≥§À§‚¿‚ÿ§¨§ §§§∏§„§ §§§´§√°™ øß°π§»√µ§∑≤Û§√§ø∑Î≤ð¢¿Ææ槵§Û§Œhttp://www.narimatsu.net/nari_page/days0203.html">§¶§¿§¶§¿∆¸µ≠§Œ 2002«Ø3∑Ó19°¡20∆¸§Œ§»§≥§Ì§À°¢flash-rom§ŒΩÒ§≠π˛§þ§À§ƒ§§§∆§Œ≤Û≈˙§ÚL-Card•·°º•Í•Û•∞•Í•π•»§«§‚§È§√§øªð§¨ΩÒ§§§∆§¢§Î§Œ§Ú»Ø∏´°£ §≥§Œ∆¸…’§Ú∏µ§À§∑§∆L-Card•·°º•Í•Û•∞•Í•π•»(lcard-users)§Œ≤·µÓ•Ì•∞§Ú√µ§∑§ø§È [lcard-users:00160] §ÀLaser5§´§È§Œ≤Û≈˙§¨§¢§Í§Þ§∑§ø°£ •ð•§•Û•»§œ a) •‚•À•ø§ŒL•≥•Þ•Û•…§Úº¬π‘§∑°¢offset§Ú0x80020000§À¿þƒÍ§∑§Þ§π°£ §Œ…Ù ¨°£ L-Card+2M §Œ•´°º•Õ•Î•§•·°º•∏§Œ offset §œ 0 §¿§√§ø§Œ§«°¢L-Card+2M§Œ•´°º•Õ•ÎΩÒ§≠π˛§þºÍΩÁΩ҃çͧÀ§‰§√§∆§‚º∫«‘§π§Î§Œ§«§∑§ø°£ §µ§È§À º´ ¨§«(ºÍΩÁΩÒ§ÀΩæ§√§∆)∫∆πΩ√€§∑§ø•´°º•Õ•Î§ÚΩÒ§≠π˛§ýæÏπÁ§Œ offset §œ 0 § §Œ§«°¢§µ§È§À∫ÆÕ§π§Î§Œ§«§∑§ø°£ (∫∆πΩ√€§∑§ø•´°º•Õ•Î§ŒΩÒ§≠π˛§þ ˝À°§œ¿Ææ槵§Û§¨ΩÒ§´§Ï§ø°÷L-Card+16M§«CFõ¿˛LAN•´°º•…§Ú∆∞§´§π°◊§ŒƒÃ§Í) §∑§´§‚ L-Card+2M §» L-Card+16M §«§œ•´°º•Õ•Î§Œ«€√÷•¢•…•Ï•π§¨∞„§¶§Œ§«°¢∆±§∏•´°º•Õ•Î•§•·°º•∏§Úª»§®§ §§ÕΩ¥∂°ƒ ª≤πÕ°ßFROM§ÀLinux§ÚΩÒ§≠π˛§ýæÏπÁ§Œª≤πÕªÒŒ¡(L-Card+2MÕ—) §ý§Í§‰§Í∆±§∏•¢•…•Ï•π§À≈桘§∑§ø§È∆∞§Ø§´§ °ƒ °˘[•≥•·•Û•»] | |
| 2005/03/01 X-17 | |
|
°˙
∫Ú∆¸§Œ§™«„ ™(KRS-2350ICS-Red Version •–•Î•Ø»« °þ 4)
°÷µ§§À∆˛§√§ø§‚§Œ§œÕæ ¨§À«„§√§∆§™§±°◊§»•¥°º•π•»§¨§µ§µ§‰§Ø§Œ§«°¢•ª°º•Î¥¸¥÷Ω™Œª£≤ ¨¡∞§Àπÿ∆˛°£ §≥§Ï§«°¢Red Version §œ 2346 §ÚπÁ§Ô§ª§Î§»12∏ƒ§À§ §Í§Þ§∑§ø°£ °ƒ§»§§§√§∆§‚°¢•»•È•÷•Î§ÚπÕ§®§Î§»°÷Œæ¬≠¡¥…Ù Red Version §À°™°◊§œÃµÕ˝§Ω§¶°£ ƒ¥ª“§¨∞≠§Ø§ §√§ø2144 §œ∂·∆£≤ ≥ÿ§µ§Û§ÀΩ§Õ˝∞ÕÕͧ∑§ §≠§„§Õ°£ #≤¶πÒ§´§È≥Œ«ß•·°º•Î§¨Õ˧ §§§Œ§œ°¢Ω™Œªƒæ¡∞§Àπÿ∆˛§¨Ω∏√ʧ∑§ø§´§È§¿§√§ø§Í§∑§∆°ƒ °˘[•≥•·•Û•»] | |
| 2005/02/27 X-19 | |
|
°˙
∫£∆¸§Œ•Ô°º•Î•…•Ï•≥°º•∫
•œ•À°º§¡§„§Û≤ƒ∞¶§§§£§£°¡ ∆∞§≠§‚Œ…§Ø§∆≥ 𕧧§§°ƒ ª‰§‚¥Ëƒ•§√§∆§¢§Û§ ª“§Ú∫ӧ̧¶°£ øπ± §µ§Û§À§œ∞≠§§§±§…∫£∆¸§œ§µ§»§®§Í§Œ±˛±Á§Ú§∑§∆§§§øª‰§«§∑§ø°£ §µ§µ°¢¥Ëƒ•§√§∆•◊•Ì•∞•È•ý∫ӧȧ §≠§„°£ °˘[•≥•·•Û•»] | |
| 2005/02/25 X-21 | |
|
°˙
ROBO-ONE•¢•Û•∆• (¬Ë£∑≤Û∆√ û«)
°÷¬Ë7≤Û ROBO-ONE ª≤≤√º‘Ãæ Ì §´§Èµ§§À§ §Î•Ì•Ð•√•»§Ú•¢•Û•∆• §Àƒ…≤√§∑§Ë§¶§´§ °◊§»ª◊§√§ø§Œ§«§π§¨°ƒ ÃÃ≈ð(°™°©)§¿§√§ø§Œ§«°¢¡¥…Ù≈–œø§∑§∆§þ§Þ§∑§ø°£ ROBO-ONE•¢•Û•∆• (¬Ë£∑≤Û∆√ û«) §«§‚°¢•»•√•◊•⁄°º•∏§Œππø∑ª˛πÔ§¨•µ°º•–§´§ÈºË∆¿§«§≠§ §´§√§ø§Í°¢•¢•Ø•ª•π§∑§øª˛¥÷§Ω§Œ§‚§Œ§À§ §√§∆§§§ø§Í°¢ππø∑§µ§Ï§Î•⁄°º•∏§œ§‚§√§»≤º§Œ≥¨¡ÿ§Œ•⁄°º•∏§¿§√§ø§Í°ƒ •·•Û•∆• •Û•π§¨¬Á —§Ω§¶§ §Œ§«°¢§‰§√§—§Í§‰§·§»§≠§Þ§π°£(¥¿ ÕËΩµ§Ø§È§§§À§Þ§øµ§§¨ —§Ô§Î§´§‚√Œ§Ï§Þ§ª§Û§±§…°ƒ (¿µº∞§ •¢•Û•∆• §Œ§€§¶§œ§Ω§Œ§¢§ø§Íøß°πºÍ§Ú∆˛§Ï§∆§¢§Í§Þ§π) °˘[•≥•·•Û•»] | |
| 2005/02/24 X-22 | |
|
°˙
(URL•·•‚)µ§§À§ §√§∆§§§Î•Ì•Ð•√•»
∫«∂·µ§§À§ §√§∆§§§Î•Ì•Ð•√•»£¥¬Œ
ª‰§‚¡·§ØøÕ∑¡§Ú∫ӧȧ §≠§„°ƒ°£§‚§ø§‚§ø§∑§∆§¡§„•¿•·§¿°£ °˘[•≥•·•Û•»] | |
|
°˙
L-Card•´°º•Õ•Î∆˛§Ï¥π§® (ø ƒΩ°ß2/21§´§Èø ƒΩ§ §∑)
•´°º•Õ•Î∫∆πΩ√€ ˝À°§œ°÷•´°º•Õ•Î§ŒΩý»˜§»•Ø•Ì•π¥ƒ∂≠§ŒπΩ√€(Laser5)°◊§Úª≤πÕ§À Ω§¿µ∏ƒΩͧœ ./drivers/char/serial.c make menuconfig make dep clean vmlinux mipsel-linux-strip vmlinux §√§∆§§§¶§´°¢L-Card+2M §» L-Card+16M §Œ•´°º•Õ•Î§√§∆∆±§∏•Ø•Ì•π¥ƒ∂≠§«∫Ó§√§∆§§§§§Œ§´§ °ƒ •§•Û•π•»°º•ÎCD§À§œ£≤ºÔŒý§Œ•´°º•Õ•Î§¨∆˛§√§∆§Î§±§…°£ --- L-CardA§™§Ð§®§¨§≠(Hideki Sakamoto§µ§Û§Œ•⁄°º•∏)§‚ª≤πÕ§À§ §Í§Ω§¶°£ °˘[•≥•·•Û•»] | |
|
°˙
∫£∆¸§Œ§™«„ ™(KRS-2350ICS-Red Version •–•Î•Ø»«)
°÷∫£≤Û§œ¬Á≤Òƒæ¡∞±˛±Á•ª°º•Î§∑§ §§§Œ§´§ °º°◊§»ª◊§√§∆§ø§È°¢≤¶πÒ§´§È•·°º•Î§¨∆œ§≠§Þ§∑§ø°£ ¬Ë£∑≤ÛROBO-ONE¬Á≤Òƒæ¡∞°™±˛±Á•ª°º•Î KRS-2350ICS-Red Version •–•Î•Ø»« (√Ì:≥⁄≈∑•¢•’•£•Í•®•§•»§ŒURL§«§π) ªÒ∂‚§ÀÕæÕµ§¨§ §§§Œ§«°¢§»§Í§¢§®§∫£≤§ƒ°£ ΩµÀˆ§À∆∞§´§∑§∆§þ§∆¥ √±§Àæ∆§±§Ω§¶§ §È(!?)§µ§È§À£≤§ƒƒ…≤√§´§ °ƒ °˘[•≥•·•Û•»] |
(•Í•Û•Ø¿Ë§œ≥⁄≈∑•¢•’•£•Í•®•§•»§«§π) ¬Ë£∑≤ÛROBO-ONE¬Á≤Òƒæ¡∞°™ ±˛±Á•ª°º•Î KRS-2350ICS-Red Version •–•Î•Ø»« »Œ«‰¥¸¥÷°ß02∑Ó22∆¸00ª˛00 ¨°¡02∑Ó28∆¸23ª˛55 ¨ ≤¡≥ °ß10,000±þ (¿«π˛10,500±þ) ¡˜Œ¡ à |
|
°˙
(HDD•Ï•≥°º•¿)°ƒ§Þ§ø¥÷∞„§√§∆æ√§∑§ø°ƒ
| |
| 2005/02/21 X-25 | |
|
°˙
L-Card•´°º•Õ•Î∫∆πΩ√€§´°© (ø ƒΩ°ßMSC 75%°¢MSP 15%)
PIC§´§È§Œ∆±¥¸•·•√•ª°º•∏§ÀπÁ§Ô§ª§∆°¢•µ°º•Ð¿©∏Ê≥—§Ú¡˜øƧπ§Î§»§≥§Ì§Þ§«¥∞Œª°£•µ°º•Ð§‚§≠§√§¡§Í∆∞§Ø§Ë§¶§À§ §Í§Þ§∑§ø°£ ¡·§Ø•¥°º•Ï•ý§Ø§Û§À≈Î∫Ч∑§∆ªÓ§∑§ø§§§±§…°¢•∏•„•§•Ì§ŒΩËÕ˝§Þ§«º¬¡ı§∑§ §§§» ‚§Ø§Œ§œÃµÕ˝§´§ §°°ƒ §«°¢§Ë§¶§‰§Ø°÷Linux§œ•Í•¢•Î•ø•§•ýΩËÕ˝§À∏˛§´§ §§°◊§»§§§¶∏Ωæð§Ú∏´§Î§≥§»§¨§«§≠§Þ§∑§ø°£ PIC§´§È§œ 20msec¥÷≥÷§«•·•√•ª°º•∏§¨Õ˧ΧŒ§À°¢Linux¬¶(VineLinux2.6 or L-Card)§ŒºıøÆΩËÕ˝§«°¢£≤≤Û ¨§Œ•·•√•ª°º•∏§Ú∆±ª˛§À§»§Í§¿§∑§∆§∑§Þ§¶§≥§»§¨§¢§Í§Þ§π°£ ¡»§þπ˛§þLinux§Œª’梧À§Ë§Î§» 1)usleep()§œÃµæÚ∑Ô§À 2•∆•£•√•Øª»§¶ (ƒÃæÔ1•∆•£•√•Ø§œ10msec) 2)•∑•Í•¢•ÎƒÃøƧŒ•◊•Ì•∞•È•ý§œ RAW •‚°º•…§À§π§Î§≥§» 3)•∑•Í•¢•ÎƒÃøƧŒ•…•È•§•–§ÚΩÒ§≠ƒæ§∑§ø ˝§¨§§§§ drivers/char/serial.c §Œ request_irq() §Œ•™•◊•∑•Á•Û§Ú SA_SHIRQ §´§È SA_INTERRUPT §À —π𠧻§Œ§≥§»°£ 3§œ•´°º•Õ•Î∫∆πΩ√€§∏§„§ §§§«§π§´°ƒª’械£ (1§‚∫∆πΩ√€§π§Ï§–1•∆•£•√•Ø1msec§»§´§À§«§≠§Î) L-Card§Œ•´°º•Õ•Î∫∆πΩ√€§ §Û§∆£≥«Ø¡∞§Àº⁄§Í§ø§»§≠§À∞Ï≤Û§‰§√§ø§¿§±§«§π§Ë°£ §‰§Í§´§ø§Úª◊§§Ω–§µ§ §≠§„°ƒ°£ °˘[•≥•·•Û•»] | |
| 2005/02/19 X-27 | |
|
°˙
•®•Û•»•Í°ºNo.51 (ø ƒΩ°ßMSC 60%, MSP 10%, §Ω§Œ¬æ 0%)
2/18 00:11 ¡˜…’§«•®•Û•»•Í»÷πÊ0051§«§∑§ø°£ MSC§œ§Ë§¶§‰§Øº¬µ°•∆•π•»≥´ªœ°£ •∑•þ•Â•Ï°º•ø§«§œ∏´§ƒ§±§È§Ï§ §´§√§ø•–•∞§¨∞Ï«’°ƒ ('-';; 10…√§À∞Ï≤ۧاȧ§•µ°º•ÐøÆπʧŒ∆±¥¸§¨§∫§Ï§¡§„§§§Þ§π°£ §…§¶§‚ºıøÆ•«°º•ø§ŒECHOΩËÕ˝§¨§ø§Þ§À•«•£•π•—•√•¡º˛¥¸§Ú±€§®§Î§þ§ø§§°£ ECHO§Úªþ§·§∆°¢20msec§¥§»§À∆±¥¸•·•√•ª°º•∏§Ú ÷§π§Ë§¶§À —ππ°£ §™§™§√°™§–§√§¡§Í°£ °ƒ§√§∆°¢§ø§Þ§Àø∂∆∞§∑§∆§Î§Ë§¶§ µ§§‚°ƒ °˘[•≥•·•Û•»] | |
| 2005/02/18 X-28 | |
|
°˙
∫£∆¸§Œ§™«„ ™(•Ì•Ð•≥•Û•Þ•¨•∏•Û No.38)
µ¢§Í∆ª§« °÷»’§¥§œ§Û∫ӧΧŒÃÃ≈𧿧 §°°ƒ•’•°•þ•Ï•ππ‘§√§¡§„§®°◊ §»ª◊§√§∆§∑§Þ§√§ø§Œ§«°¢§§§ƒ§‚§ŒÀÐ≤∞§µ§Û§À¥Û§Í∆ª§∑§∆πÿ∆˛°£ °÷•≥°º•“°º∞˚§þ§ §¨§È§¡§Á§√§»§¿§±°ƒ°◊§»ª◊§√§∆§§§ø§È°¢¡¥…Ù∆…§þ¿⁄§√§∆§∑§Þ§§§Þ§∑§ø°£ °÷¿©∏ʧڧœ§∏§·§Ë§¶°™•Ì•Ð•√•»§ÚæºͧÀ∆∞§´§π§ø§·§À°◊§»§§§¶œ¢∫Ч¨À∫§Ï§ø√Œº±§Úª◊§§Ω–§µ§ª§∆§Ø§Ï§∆§Þ§π°£ °˘[•≥•·•Û•»] | |
|
°˙
(URL•·•‚)ºı∆∞ ‚π‘∑ø§Œ∆Û¬≠ ‚π‘•Ì•Ð•√•»
robot-fan.net§Œ∆¸µ≠∑–Õ≥ NIKKEI NET §´§È ∆≤§£≥¬Á≥ÿ°¢æ •®•Õ§Œ∆Û¬≠ ‚π‘•Ì•Ð•√•»≥´»Ø°¶Ω≈ŒœÕ¯Õ— °° ∆≤§§Œ3§ƒ§Œ¬Á≥ÿ§¨°¢Ω≈Œœ§‰¥∑¿≠§ŒŒœ§Ú§¶§Þ§ØÕ¯Õ—§∑§ §¨§È ø√œ§«§‚≥ͧȧ´§À ‚§Øæ •®•Õ•ø•§•◊§Œ∆Û¬≠ ‚π‘•Ì•Ð•√•»§Ú§Ω§Ï§æ§Ï≥´»Ø§∑§ø°£∆Û¬≠ ‚π‘•Ì•Ð•√•»§«§œ•€•Û•¿¿Ω§Œ°÷£¡£”£…£Õ£œ°◊§¨Õ≠Ã槿§¨°¢§≥§Ï§È§Œæ •®•Õ ‚π‘•Ì•Ð•√•»§œ£¡£”£…£Õ£œ§Œ10 ¨§Œ1∞ ≤º§Œ•®•Õ•Î•Æ°º§« ‚§≠≤ۧΧ»§§§¶°£ µ≠ªˆ§À§‚§¢§Î§Ë§¶§À°÷ºı∆∞ ‚π‘°◊§«§π§Õ°£ ∫ګا¿§´∞Ï∫ګا¿§´§ÀæÆ≥ÿ¿∏§ŒΩ˜§Œª“§¨≤∆µŸ§þ§Œº´Õ≥∏¶µÊ§«∫Ó§√§∆∂√§´§Ï§∆§ø§√§±°£ °°£Õ£…£‘§¨∫Ó§√§ø•Ì•Ð•√•»§œπ‚§µ43•ª•Û•¡°¢Ω≈ŒÃ2.75•≠•Ì•∞•È•ý°£ ‚§≠Ω–§πª˛§À§œ•‚°º•ø°º§ŒŒœ§Úº⁄§Í§Î§¨°¢§Ω§Œ∏§œ¬≠§Ú∏Ú∫π§π§Î∫𧌬ŒΩ≈∞Ð∆∞§Ú§¶§Þ§ØÕ¯Õ—§∑§∆ ‚π‘§π§Î §§§§§ §°°ƒ§≥§Ï§ §ÈæƧµ§§•‚°º•ø°º§«∆∞§±§Î§´§‚°£ ROBO-ONE§«≥ ∆Ƨڧπ§Î§Œ§œÃµÕ˝§¿§Ì§¶§±§…°¢≤⁄‘˙§ øÕ∑¡§»§´∫Ó§Ï§Ω§¶°£ œ¿ ∏∆…§Û§«§þ§ø§§§ °£ --- 2005.02.18 15:47 ƒ…µ≠ ¿§≥¶§Œ£≤¬≠ ‚π‘•Ì•Ð•√•»∏¶µÊ §Ú∏´§ø¥∂§∏§¿§» °¶MIT Leg Laboratory (MIT) °¶Delft Biped Laboratory (•«•Î•’•»π©≤ ¬Á≥ÿ) °¶The Cornell BioRobotics and Locomotion Lab (•≥°º•Ï•Î¬Á≥ÿ) §´§ °© ΩµÀˆ§Àª˛¥÷§¨§¢§√§ø§È•¡•ß•√•Ø§∑§Þ§∑§Á§¶°£ °˘[•≥•·•Û•»] | |
|
°˙
•®•Û•»•Í°º•∑°º•»¡˜§Í§Þ§∑§ø
•®•Û•»•Í°º§Þ§«§À ‚§´§ª§ø§´§√§ø§±§…°¢§Ω§Ï§Ú§‰§√§∆§Î§»§Þ§ø°∫¿⁄§Æ§Í§Æ§Í§À§ §Î§Œ§«ƒ¸§·§Þ§∑§ø°£ º¬§œ¬Ë£µ≤Û¬Á≤Ò§´§È•®•Û•»•Í°º•∑°º•»§Œ√Êø»§œ§€§»§Û§… —§Ô§√§∆§§§Þ§ª§Û°£ —§Ô§√§∆§§§Î§Œ§œ•¥°º•Ï•ý§Ø§Û§ŒºÃøø§Ø§È§§°ƒ(¥¿ --- §Ω§Ì§Ω§Ìƒ´∑ø§À∞Ðπ‘§∑§ §≠§„§ §Œ§«∫£»’§œ§≥§Ï§Ø§È§§§«°£ °˘[•≥•·•Û•»] | |
| 2005/02/17 X-29 | |
|
°˙
(URL•·•‚) PICÕ—§ŒRS485…˜§ •Þ•Î•¡•…•Ì•√•◊•–•π
øÔ ¨¡∞§À∏´…’§±§∆§§§ø§Œ§«°¢§…§¶§‰§√§∆Ω¶§√§ø§Œ§´À∫§Ï§ø§±§…•·•‚ (¬ø ¨ Google §«√µ§∑§‚§Œ§∑§∆§§§∆∏´…’§±§ø§Û§¿§»ª◊§¶) PBUS - an RS485-like multi-drop bus with half duplex serial protocol PBUS is an RS485-like multi-drop bus for interconnecting PIC and other microcontroller-driven devices. Protocol and software is written by Jap. Just include a separate pbus library file into your project and add your command handlers for the specific device in a few lines. ≤Ûœ©øÞ§‰•µ•Û•◊•Î•◊•Ì•∞•È•ý§‚§¢§Í§Þ§π°£ TX§À•¿•§•™°º•…§Ú∆˛§Ï§Î§Œ§¨•ð•§•Û•»§ §Œ§´§ °ƒ ¬Á§≠§§•÷•Ï•√•…•Ð°º•…§Ú«„§√§ø§ÈªÓ§∑§ø§§§ °£ § §Û§∆§‰§√§∆§ø§Èªƒ§Í∞Ï•ˆ∑Ó¿⁄§√§∆§Þ§π§Ë°£ •®•Û•»•Í°º•∑°º•»§œµ¢¬§∑§ø§È¡˜øƧ∑§Þ§π°£ °˘[•≥•·•Û•»] | |
| 2005/02/15 X-31 | |
|
°˙
≈¨∫ý≈¨ΩÍ (ø ƒΩ°ßMSC 50%°¢MSP 5%°¢§Ω§Œ¬æºÍ§ƒ§´§∫)
MSC 3.0§œ°¢•µ°º•ÐøÆπÊΩ–Œœ•ø•§•ý•∆°º•÷•Î§Ú∏´§ §¨§ÈΩÁ»÷§ÀøÆπʧŒ•¢•√•◊°ø•¿•¶•Û§Ú𑧶§»§≥§Ì§Þ§«¥∞¿Æ°£(§Þ§¿•∑•þ•Â•Ï°º•ø•«•–•√•∞√Ê) §«§‚°¢§≥§Œ§Þ§Þ∫Ó§√§∆§Î§»¥÷§ÀπÁ§Ô§ §§§Œ§«°¢§Þ§ø§Þ§øª≈ÕÕ —ππ°£('-';; MSC 3.0§œPIC16F877§Œ A,B,C,D 4•ð°º•»§«28∏ƒ§Œ•µ°º•Ð§Ú8bit ¨≤Ú«Ω§«¿©∏ʧ∑§Þ§π°£ (¥∞¿Æ§∑§ø§È§Õ) ≥∆•ð°º•»§Œ•µ°º•ÐøÆπÊΩ–ŒœΩËÕ˝§«§œ°¢øÆπÊ —ππª˛πÔ(°·•µ°º•Ð¿©∏Ê≥—)§ŒΩÁ§À•µ°º•Ð»÷πÊ§Ú ¬§Ÿ§ø•ø•§•ý•∆°º•÷•Î§Ú§‚§»§À°¢•ø•§•Þ°º1§Œ√Õ§Ú¥∆ªÎ(CCPµ°«Ω§ÚÕ¯Õ—)§∑§ §¨§È°¢•∑•Í•¢•ÎƒÃøÆΩËÕ˝§» ¬π‘§∑§∆•µ°º•ÐøÆπÊΩ–Œœ§Œ•¢•√•◊°ø•¿•¶•Û§Ú𑧧§Þ§π°£ ∏Ω∫þ§Œ¿þ∑◊§«§œ°¢øÆπÊ —ππª˛πÔ§Œ ¬§Ÿƒæ§∑§ÚPIC§«π‘§¶§≥§»§À§ §√§∆§§§Þ§∑§ø§¨°¢•Ω°º•»ΩËÕ˝§Ú50¶Ãsec§Œ•«•£•π•—•√•¡§ÀπÁ§Ô§ª§Î§Œ§¨¬Á —§ §Œ§«°ƒ •ø•§•ý•∆°º•÷•Î§Ω§Œ§‚§Œ§Úø∆CPU(L-Card)§´§È¡˜§Í§ƒ§±§Î§≥§»§À§∑§Þ§π°£ §≥§Ï§ §È C§«ΩÒ§±§Î§´§È≥⁄°ƒ§´§ °£ º°§Œ≤ð¬Í§œ°¢L-Card¬¶§ŒΩËÕ˝§Ú•µ°º•Ð¿©∏ʺ˛¥¸(20msec)§À∆±¥¸§µ§ª§Î ˝À°°£ §≥§Û§ •⁄°º•π§«•∏•„•§•ÌΩËÕ˝§Œº¬¡ı¥÷§ÀπÁ§¶§Œ§´§ °ƒø¥«€§À§ §√§∆§≠§Þ§∑§ø°£ °˘[•≥•·•Û•»] | |
| 2005/02/13 X-33 | |
|
°˙
∫Ú∆¸§Œ§™«„ ™(•¡•√•◊∑øLED°¢•·•ø•Î•÷•√•∑•Û•∞•¢•√•—°º•±°º•π)
°÷Ω©Õ’π‘§√§∆§ §§§«•◊•Ì•∞•È•ýΩÒ§±§Ë§√°™°◊§»§´∏¿§Ô§Ï§Ω§¶°ƒ ª∞œ¢µŸ§œ≤»§«•◊•Ì•∞•È•þ•Û•∞§Œ§ƒ§‚§Í§¿§√§ø§Û§¿§±§…°¢¿ËΩµ«„§√§øPIC•‚•∏•Â°º•Î§Œ “ ˝§¨≤ı§Ï§∆§ø§Œ§«°¢∏Ú¥π§∑§∆§‚§È§§§Àπ‘§√§ø§Œ§«§π°£ (ª‰§¨≤ı§∑§ø§Û§∏§„§ §§§Ë§√°™•ª°º•ø°º§Œ¿≈≈≈µ§§Ú ¸≈≈§∑§ø§Í§∑§∆§ §§§Ë§√°™) §«°¢§’§» °÷u-hirohito§µ§Û§¨•¡•√•◊LED§«•≠•Á•Ì•≠•Á•Ì§π§Î•‚•Œ•¢•§∫Ó§√§∆§ø§ §°°◊§»ª◊§√§∆°¢¿÷§»Œ–§Ú10∏ƒ§∫§ƒ«„§√§∆§þ§Þ§∑§ø°£ (¬ø ¨∫£≤Û§œ¥÷§ÀπÁ§Ô§ §§§«§∑§Á§¶) §Ω§Œ∏°¢≤¶πÒ§ÿπ‘§√§∆°¢¡∞≤Û«„§§∆®§∑§ø°÷•·•ø•Î•÷•√•∑•Û•∞•¢•√•—°º•±°º•π(£∂∏ƒ∆˛§Í)°◊§Ú£≤•ª•√•»πÿ∆˛°£ (§≥§Ï§‚∫£≤Û§œ¥÷§ÀπÁ§Ô§ §§µ§§¨°ƒ) § §Û§∆§‰§√§∆§Î§¶§¡§À§¢§»£≥£≥∆¸§À°ƒ §Ω§√§´°¢£≤∑Ó§œ£≤£∏∆¸§Þ§«§ §Œ§Õ(¥¿ °˘[•≥•·•Û•»] | |
| 2005/02/09 X-37 | |
|
°˙
(MEMO)2346ICS ¿÷•È•Ÿ•Î§Œ•≠•„•◊•¡•„¿⁄¬ÿ§®•ø•§•þ•Û•∞
…·ƒÃ§Œ≤Òº“∞˜§Œ∆¸µ≠ §Œ2∑Ó8∆¸§Œ∆¸µ≠ °÷µ’±ø∆∞≥ÿ£≤°•£±°°•®•Ø•ª•Î§«§Œ∏°æ⁄¥∞Œª¢ˆ °◊ §´§È •·•‚°ß£À£»£“°ð£±§Œ•Þ•À•Â•¢•Î§Œ√ʧÀ¿÷•È•Ÿ•Î° •µ°º•Ð°À§À§ƒ§§§∆°¢ ∆¸µ≠§ÀΩÒ§§§∆§Ø§Ï§∆§¢§Í§¨§»§¶§¥§∂§§§Þ§π°º °‰ ¿æ§µ§Û KHR-1§Ú«„§Ô§ §§§»§Ω§Œæ ۺͧÀ∆˛§È§ §§§Œ§´§ §°°ƒ ∂·∆£≤ ≥ÿ§Àɧ§πÁ§Ô§ª§Ï§–∂µ§®§∆§‚§È§®§Î§≥§»§ §Œ§´§ °© §≥§Ï§«§ §Û§»§´¿÷•È•Ÿ•Î¬–±˛•Ì•∏•√•Ø§‚¿þ∑◊§«§≠§Ω§¶°£ (º¬¡ı§«§≠§Î§Œ§œ¬Á≤Ò§Œ§¢§»§´§ °ƒ) «…∏ؿ˧Œª≈ªˆ§¨Àª§∑§Ø§∆∫£Ωµ§Œø ƒΩ•º•Ì°ƒ(¥¿ …˜ºŸ§“§§§∆ΩµÀˆ§ƒ§÷§µ§ §§§Ë§¶§Àµ§§Ú§ƒ§±§ §≠§„ °˘[•≥•·•Û•»] | |
| 2005/02/06 X-40 | |
|
°˙
∫Ú∆¸§Œ§™«„ ™ (L∑ø•‘•Û•ÿ•√•¿°¢PIC°¢•·•ø•Î•÷•√•∑•Û•∞•¢•√•—°º•±°º•π)
°÷∏·∏§´§È𑧱§–•·•ø§¡§„§Û§»•¿•§• §Œ¬–¿Ô∏´§Ï§Î§ °º°◊§»ª◊§§§ƒ§ƒ°¢Ω©Õ’§À√§§§ø§Œ§œ∏·∏£∂ª˛≤·§Æ°ƒ(«œºØ ≤¶πÒ§«§Œ•§•Ÿ•Û•»§œ§»§√§Ø§ÀΩ™§Ô§√§∆§Þ§∑§ø°£ «„§√§ø§Œ§œ
§€§Û§»§œ•¢•√•—°º•±°º•π£∂∏ƒ∆˛§Í§Ú«„§§§ø§´§√§ø§Œ§À§ °º ÃЧŒ¡∞§À£∂∏ƒ∆˛§Í§Œ¬´§¨§¢§√§ø§Œ§¿§±§…°¢§Ω§Ï§œ≥§≥∞»Ø¡˜Õ—§«§∑§ø°£(∆Ê ∫£≈Ÿ§´§È§œ°¢•÷•ƒ§Ú≤°§µ§®§∆§™§§§∆«„§§§Àπ‘§≥§¶§»ª◊§§§Þ§π°£ (≈≈œ√§«ºË§Í§™§≠Õͧ·§Î§Œ§´§ °ƒ) °˘[•≥•·•Û•»] |
   |
| 2005/02/05 X-41 | |
|
°˙
ø ƒΩ (MSC 25%°¢ §Ω§Œ¬æ…‘ÿ)
√±Ω„§ ª˛¥÷¬‘§¡•Î°º•◊§Œº¬¡ı§À12ª˛¥÷§‚§´§´§Î§ §Û§∆°ƒ •◊•Ì•∞•È•Þ§Œ∫Õ«Ωõ§§§Û§∏§„§ §§§Œ°© °‰ §Ô§ø§∑ (•Õ•√•»∏°∫˜§«∞Ï«’∏´§ƒ§´§Î•Ì•∏•√•Ø§Þ§«º´Œœ§«º¬¡ı§π§Î§Œ§œ§‰§·§ø ˝§¨°ƒ) °÷MPLAB•∑•þ•Â•Ï°º•ø§«∆∞§Ø§Œ§Àº¬∫ð§ŒPIC槫§œ∆∞§´§ §§°◊ §»§§§¶¥ÒÃا ∏Ωæð§»∫Õ«Ω§ŒÃµ§µ§¨Ω≈戧∑§ø§ª§§§«°¢£µ∆¸¥÷ÀË»’∫Ó∂»§∑§ø§Œ§À§€§»§Û§…ø ƒΩõ§∑°£ ∫£ΩµÀˆ§¨§Û§–§È§ §§§»•®•Û•»•Í°º¡∞§À¬≠∆ߧþ§µ§ª§Î§Œ§π§È∆Ò§∑§Ω§¶§«§π°£ °˘[•≥•·•Û•»] |
∫«Ω™≈™§ •≥°º•… (≈ˆΩȧœ 31step §‚»Ò§∑§∆§Þ§∑§ø°ß¥¿) ;--- WAIT while COUNT W--- ; W•Ï•∏•π•ø§«ªÿƒÍ§∑§ø•´•¶•Û•»§¿§±WAIT§π§Î ; §≥§Œ•Î°º•¡•Û§¨256•–•§•»∂≠≥¶§Ú§Þ§ø§¨§ §§§Ë§¶§À√Ì∞’ ; ; W §œ 9°¡255 §Œ¥÷ ;--- WAIT_W addlw D'256' - D'9' ; = W - 9 WAIT_W_4_LOOP ;--- §≥§Œ…Ù ¨§« 4 cycle --- addlw D'256' - D'4' ; = W - 4 btfsc STATUS, C ; if ( W < 0 ) then skip goto WAIT_W_4_LOOP WAIT_W_JUMP_TABLE subwf PCL,F nop nop nop nop return |
| 2005/02/02 X-44 | |
|
°˙
(œø≤Ë•·•‚) 2/6 13:30-14:55 ∆¸•∆•Ï •Ô°º•Î•…•Ï•≥°º•∫•Ì•Ð•√•»•–•»•ÎPR»÷¡»
fuRo --çÕ˕̕Е√•»µªΩ—∏¶µÊ•ª•Û•ø°ºblog( ÃÃæ°ß¿Ë¿Ó∏∂§µ§Û§Œ∆¸µ≠) °÷•Ì•Ð•√•»•–•»•Î∆√»÷º˝œø°◊ §´§È •Ì•Ð•√•»•–•»•Î§ŒPR»÷¡»§œ2∑Ó6∆¸° ∆¸°À13:30°¡14:30°£•»°º• •·•Û•»æ°º‘§ŒÕΩ¡€§‰°¢ÃΧŒ•Ô°º•Ï•≥§«§œ∏´§È§Ï§ §§±«¡¸° ΩÒ§≠ ˝§¨ —§´§ §¢°£¥™∞„§§§µ§Ï§Ω§¶§¿°À§‚§¢§Î°£ Yahoo! TV§´§È •Ô°º•Î•…°¶•Ï•≥°º•∫≥´∫≈∑˃Ͱ™¿§≥¶∫«∂ؕ̕Е√•»•–•»•ÎGP œø≤˪˛¥÷§œ Yahoo! TV§ÚøƧ∏§ø§€§¶§¨Ãµ∆Ò§´§ °ƒ ª≤πÕ°ß •Ô°º•Î•…°˘•Ï•≥°º•∫∏¯º∞•⁄°º•∏ §¡§ §þ§À 2/6 §Œ•Ô°º•Î•…°˘•Ï•≥°º•∫§œ •¨•Û•¿•ý VS ≈¥øÕ §«§π°£ --- œø≤Ë•·•‚§ŒƒÍ∑ø•’•©°º•Þ•√•»∫ӧȧ §≠§„°ƒ §Ω§Ï§Ë§Í§‚°¢œø≤˺∫«‘§Œ∏∂∞¯§¨»Ω§È§ §§§Œ§¨…‘∞¬°ƒ °˘[•≥•·•Û•»] | |
| 2005/01/31 X-46 | ||||||||||||||||
|
°˙
ªƒ∫Ó∂»•Í•π•»
ªƒ∫Ó∂»•¡•ß•√•Ø °˘•Ω•’•»•¶•ß•¢§Þ§Ô§Í
°˘•œ°º•…•¶•ß•¢§Þ§Ô§Í
∫«ƒ„∏¬§Œ∫Ó∂»§«§≥§Ï§Ø§È§§°ƒ§´§ °ƒ §√§∆°¢£≥•ˆ∑Ó¡∞§´§È§€§»§Û§…ø ‚§∑§∆§ §§§Û§∏§„°ƒ(¥¿ °˘[•≥•·•Û•»] | ||||||||||||||||
|
°˙
ø ƒΩ (MSC 25%°¢§Ω§Œ¬æ…‘ÿ)
ø∑•Ì•∏•√•Ø»«•µ°º•Ð•≥•Û•»•Ì°º•È§Úº¬∫ð§Œ≤Ûœ©§«•∆•π•»√Ê°£ 57.6Kbps§«ƒÃøƧ∑§ƒ§ƒ°¢•µ°º•Ð§Ú¿©∏ʧ«§≠§Î§Ë§¶§«§π°£ ∏Ωæı§«§œ°¢•µ°º•ÐøÆπʧŒ•‘°º•Ø…˝§Ú§≠§√§¡§Í¿©∏ʧ∑§∆§§§ §§§Œ§«°¢À˺˛¥¸(20msec)§«øÙ¶Ãsec§÷§Ï§∆§§§Þ§π°£ •¢• •Ì•∞•µ°º•Ð(Futaba S3003)§œ§≥§Œƒ¯≈Ÿ§Œ§÷§Ï§«§œ±∆∂¡§ §§§±§…°¢•«•∏•ø•Î•µ°º•Ð(KO PDS-2143FET)§¿§»ø∂∆∞§π§ÎÃŒÕÕ°£ ˝øÀ§œ¥÷∞„§√§∆§§§ §§§Ë§¶§ §Œ§«°¢§≥§Œ§Þ§Þ≥´»Ø¬≥π‘°£ •®•Û•»•Í°º°∫¿⁄§Þ§«§¢§»£≤Ωµ¥÷§»§¡§Á§√§»°£≥´»Ø§ÚµÞ§¨§ §≠§„°£ --- ≈≈∏ª≈≈∞µ§Ú¥÷∞„§®§∆≤ı§∑§ø§»ª◊§√§∆§§§ø•∆•π•»Õ—§ŒPIC§œ¿∏§≠§∆§§§Î§Ë§¶§«§π°£ 14V§´§±§∆§‚≈≈ŒÆ§¨ŒÆ§Ï§ §±§Ï§–¬ÁæÊ…◊§ §Œ§´§ °© °˘[•≥•·•Û•»] |
 MSC 3.0 •∆•π•»¥ƒ∂≠ 1∑Ó11∆¸§Œ≤Ûœ©§À•µ°º•ÐÕ—§Œ«€¿˛§Úƒ…≤√ | |||||||||||||||
| 2005/01/30 X-47 | ||||||||||||||||
|
°˙
∫Ú∆¸§Œ§™«„ ™°øߧ´§Í•Þ•Û•«°ºœø≤˺∫«‘
§™√Î∫¢π‘§Ø§ƒ§‚§Í§¿§√§ø§Œ§À°¢≈˛√§∑§ø§Œ§œ∏·∏£µª˛§¡§Á§√§»¡∞°£ £µª˛»æ§À§œ∂‰∫¬§«Õß√£§»≤Ò§¶ÃÛ¬´§¨§¢§√§ø§Œ§«°¢•–•ø•–•ø§»§™«„ ™°£ §Ê§√§Ø§Í§™œ√§∑§«§≠§ §Ø§∆§¥§·§Û§ §µ§§°£ °‰ §§§∑§´§Ô§µ§Û §Û°º°ƒ•‚•«•Î•Ÿ°º•π≥´»Ø§œ¡¥¡≥∆‚Õ∆§¨Õ˝≤Ú§«§≠§ §§°ƒ(¥¿ 5-5§¢§ø§Í§œ≤ø§»§´ª≤πÕ§À§ §Î§´§ §°°ƒ §‰§√§—§Í¿©∏Êπ©≥ÿ§Ú Ÿ∂ا∑ƒæ§µ§ §≠§„§¿§·§´§∑§È°£ (Œ…§Ø√±∞ú˧ϧø§Õ) ƒ´§Œ°÷ߧ´§Í•Þ•Û•«°º°◊§œœø≤˺∫«‘ § §ºº∫«‘§∑§ø§Œ§´»Ω§È§ §§§±§…œø≤Ë•«°º•ø§œ∫Ω§ŒÕÚ§«§∑§ø°£ º∫«‘∏∂∞¯§¨»Ω§È§ §§§Œ§œ∫§§Î§Û§¿§±§…°ƒ °˘[•≥•·•Û•»] |
(•Í•Û•Ø¿Ë§œ•™°º•ýº“) ∆Û¬≠ ‚π‘•Ì•Ð•√•»§Œ•‚•«•Î•Ÿ°º•π≥´»Ø √¯º‘°ßROBO-ONE∞—∞˜≤Ò°° ‘ ƒÍ≤¡°ß3675±þ(ÀЬŒ3500±þ°Ð¿«) B5°°248 « ISBN°°4-274-20020-5 | |||||||||||||||
| 2005/01/27 X-50 | ||||||||||||||||
|
°˙
º÷Œÿ§Œ∫∆»Øÿ°©
§Ë§¶§‰§Ø•µ°º•Ð•≥•Û•»•Ì°º•È§¨§«§≠§ƒ§ƒ§¢§Î §Ô§±§«§π§¨°ƒ §’§»°÷§‚§∑§´§∑§∆•Ô°º•Î•…•Ô•§•…§«∏´§ø§Èº÷Œÿ§Œ∫∆»Øÿ°©°◊§»ª◊§√§∆ Google §∑§∆§þ§ø§È°ƒ PIC ring buffer USART OR UART §Œ∏°∫˜∑Î≤à ÃÛ 5,550 ∑Ô PIC servo USART OR UART §Œ∏°∫˜∑Î≤à ÃÛ 1,760 ∑Ô PIC servo ring buffer USART OR UART §Œ∏°∫˜∑Î≤à ÃÛ 236 ∑Ô ª◊§§§√§≠§Íº÷Œÿ§Œ∫∆»Øÿ§∑§∆§Þ§π§Õ°ƒ §Þ°¢ Ÿ∂ا §Û§¿§´§Èª≈ ˝§ §§§´°£ §Ω§Ï§À•È•§•÷•È•Í§Úª˝§√§∆§≠§∆§‚¿©∏Ê•ø•§•þ•Û•∞§ŒÃ‰¬Í§«ª»§®§ §§§≥§»§‚¬ø§Ω§¶°£ (≥‰§Íπ˛§þª»§√§∆§ø§È¥÷§ÀπÁ§Ô§ §§§Û§¿§∑) ∞ ¡∞§À∆±§∏∏°∫˜§∑§ø§»§≠§œ°¢USART §«√µ§∑§ø§Œ§«•“•√•»øÙ§¨æا §´§√§ø§þ§ø§§°£ °˘[•≥•·•Û•»] | ||||||||||||||||
|
°˙
ø ƒΩæı∂∑ (MSC 20%, §Ω§Œ¬æ…‘ÿ) / MPLAB IDE v7.00
§Ë§¶§‰§Øø∑•Ì•∏•√•Ø»«•µ°º•Ð•≥•Û•»•Ì°º•È§Œ∑¡§¨§«§≠§∆Õ˧ާ∑§ø°£ MPLAB•∑•þ•Â•Ï°º•ø槫•∑•Í•¢•ÎƒÃøƧ»•µ°º•Ð¿©∏ʧާԧͧڕ∆•π•»√ʧ«§π°£ §¢§»§œPWM§Œ•‘°º•Ø…˝ΩÁ§À•Ω°º•»§π§Î•Î°º•¡•Û§Ú¡»§þ§≥§·§–¶¡»«¥∞¿Æ°£ ∫£ΩµÀˆ§Þ§«§Àº¬∫ð§À•µ°º•Ð§Ú∆∞§´§ª§Î§Ë§¶§À§∑§ø§§§«§π°£ §€§Û§»§œ¿©∏Ê≥—§Ú 10bit§«ªÿƒÍ§«§≠§Î§Ë§¶§À§∑§ø§§§Œ§¿§±§…°¢16bit§«§Œ•Ω°º•»•Î°º•¡•ÛΩҧاŒ§¨ÃÃ≈𧠧Œ§«∏Â≤Û§∑°£ §Ω§Û§ ≤À§¨§¢§√§ø§È•∏•„•§•Ì¿©∏ʕΰº•¡•ÛΩÒ§´§ §§§»°ƒ --- §§§ƒ§Œ§Þ§À§´°¢MPLAB SIM §« USART•‚•∏•Â°º•Î§Ú•∑•þ•Â•Ï°º•»§«§≠§Î§Ë§¶§À§ §√§∆§§§Þ§∑§ø°£ (∫£ª»§√§∆§§§Î§Œ§œ Ver 7.0) ∆˛Œœ•«°º•ø§Ú•’•°•§•Î§«Õ—∞’§∑§∆§™§Ø§»°¢¿þƒÍ§∑§ø•”•√•»•Ï°º•»§«ºıøÆ•«°º•ø§¨∆œ§≠§Þ§π°£ Ver 5.70 §Œ∫¢§À»Ê§Ÿ§Î§»≥´»Ø∏˙Œ®§¨§´§ §Í•¢•√•◊§∑§ø§Ë§¶§Àª◊§§§Þ§π°£ °˘[•≥•·•Û•»] | ||||||||||||||||
| 2005/01/26 X-51 | ||||||||||||||||
|
°˙
(URL•·•‚)PIC FAQ: •¢• •Ì•∞∆˛Œœ§Œ•§•Û•‘°º•¿•Û•π§»§´
PIC FAQ§Œ•⁄°º•∏ §´§È Q20°°PIC16F877§ŒA/D§À≤ƒ —ƒÒπ≥° 50k B•´°º•÷°À§« ¨∞µ§∑§∆∆˛Œœ§∑§∆§§§Î§Œ§«§π§¨ —¥π∑Î≤稧»§∆§‚…‘∞¬ƒÍ§ §Œ§«§π°£ §‚§¶§π§∞…¨Õ◊§À§ §Í§Ω§¶§ §Œ§«•·•‚°£ §√§∆°¢≤√¬Æ≈Ÿ•ª•Û•µ°º§œ L-Card §«∆…§ý§≥§»§À§∑§ø§Û§¿§√§±°£ L-Card users §Œ ML §«°¢°÷•§•Û•‘°º•¿•Û•π§ÚΩÒ§§§øªÒŒ¡§¨∏´…’§´§È§ §§°º°◊§√§∆§§§¶≈Íπ∆§¨§¢§√§ø§±§…≤Ú∑˧∑§ø§Œ§´§∑§È°© --- ª≤πÕ°ß PIC FAQ§Œ•⁄°º•∏ (∏≈§§ML) Microchip PIC (ø∑§∑§§ML) §™§Þ§±°ß Q32°°TMR0≥‰§Íπ˛§þ§Úª»§√§∆¿©∏ʧ∑§ø§§§Œ§«§π§¨°¢≥‰§Íπ˛§þ§¨§´§´§Î•ø•§•þ•Û•∞§¨1•π•∆•√•◊§∫§Ï§Îªˆ§¨§¢§Í§Þ§π°£∏Ì∫π§À§ §Í§Þ§ª§Û§´°© °˘[•≥•·•Û•»] | ||||||||||||||||
| 2005/01/21 X-56 | ||||||||||||||||
|
°˙
(URL•·•‚)•µ°º•Ð•π•⁄°º•µ°º£¡§ÚÕ¯Õ—§∑§ø¡»Œ©Œ„
•ø•§•ý•Í°º§À ∂·∆£≤ ≥ÿ Kondo-Robot.com §«∏¯≥´°£ •µ°º•Ð•π•⁄°º•µ°º£¡§ÚÕ¯Õ—§∑§ø¡»Œ©Œ„ (≤Ë¡¸¬øøÙ§Œ§ø§·•Í•Û•Ø¿Ë§Úª≤滧Œ§≥§») §Ω§√§´°ƒ°÷∆±§∏π‚§µ°◊§√§∆§≥§¶§§§¶∞’㧠§Œ§Õ°£ «º∆¿°£ 4649•µ°º•Ð§»¡»§þπÁ§Ô§ª§øª˛§À•‚°º•ø°º§Œ∆®§≤æϧ¨ªƒ§Î§´§…§¶§´°ƒ °˘[•≥•·•Û•»] |
(•Í•Û•Ø¿Ë§œ∂·∆£≤ ≥ÿ) ª»Õ—ªˆŒ„£± | |||||||||||||||
| 2005/01/20 X-57 | ||||||||||||||||
|
°˙
•µ°º•Ð•π•⁄°º•µ°º£¡ §√§∆≤ø°©
°⁄≥⁄≈∑ª‘æÏ°€•ƒ•Ø•‚ •Ì•Ð•√•»≤¶πÒ §Œ KO PROPOΩ„¿µ•¢•Ø•ª•µ•Í §« °÷•µ°º•Ð•π•⁄°º•µ°º£¡°◊§»§§§¶§Œ§Ú∏´…’§±§ø§Œ§«§π§¨°ƒ •µ°º•Ð§ŒºË…’§±§Ú•µ•ð°º•»°£ §Û°º§Û°º§Û°º §…§¶§‰§√§∆ª»§¶§Û§«§∑§Á§¶°© ≤Ë¡¸§Ú∏´§∆§‚§…§¶§§§¶…˜§À§ §Î§Œ§´∏´≈ˆ§¨…’§≠§Þ§ª§Û°£ °˘[•≥•·•Û•»] |
(•Í•Û•Ø¿Ë§œ•ƒ•Ø•‚•Ì•Ð•√•»≤¶πÒ) •µ°º•Ð•π•⁄°º•µ°º£¡ | |||||||||||||||
| 2005/01/19 X-58 | ||||||||||||||||
|
°˙
(URL•·•‚) ª‘»Œ£≤¬≠ ‚π‘•Ì•Ð•√•»∂•µª≤Ò°˜¥ÿ¿æ
ROBO-ONE¥—¿Ôµ≠ Robot-Fan ∑–Õ≥ •Ì•Ð•√•»•’•©°º•π °¡L.L.PALACE ROBOT FORCE Official Site°¡ •§•Ÿ•Û•»æ Û §´§È (∆±øÕªÔ¥ÿœ¢§Œ•…•·•§•Û§ §Œ§«°¢∏°±Ð•’•£•Î•ø§À∞˙§√§´§´§ÎæÏπÁ§¨§¢§Í§Þ§π) •µ•§•»∆‚§´§Èæ Û§Ú¿⁄§Í≈Ω§Í§π§Î§»
§√§∆§≥§»§þ§ø§§°£ §Ω§√§´§°°ƒ10À¸±þ¬Ê§«ºÍ§À∆˛§Î§Ë§¶§À§ §Î§»§≥§¶§§§¶§Œ§‚§¢§Í§ §Û§¿°£ •ø•Ï§≥§‚§¶§»ª◊§√§ø§±§…°¢§¶§Þ§§•ø•Ï•≥§þ ∏§¨ΩÒ§±§ §§°ƒ°£ •µ•§•»§¨•’•Ï°º•ý∑¡º∞§À§ §√§∆§∆ª≤πՕ͕ەاڃ•§Í§À§Ø§§§Œ§‚§¢§Î§±§…°¢ª‘»Œ•Ì•Ð•√•»§√§∆§»§≥§Ì§À•¢•Ï•≤≈Ÿ§Œƒ„§µ§Ú¥∂§∏§Î§´§È§´§‚°ƒ °ƒ§√§∆°¢∞Ï»÷§ŒÕ˝Õ≥§œ°÷º´ ¨§«§œ10À¸±þ§Œ•Ì•Ð•√•»§Ú«„§®§ §§§´§È°◊§¿§√§ø§Í --- ª≤πÕ°ß ≥Ùº∞≤Òº“•®•Î•®•Î•—•Ï•π ∂·∆£≤ ≥ÿ •Ì•Ð•√•»…ÙÃÁWeb•⁄°º•∏ ∂·∆£≤ ≥ÿ KHR-1 °˘[•≥•·•Û•»] | ||||||||||||||||
|
°˙
ø ƒΩæı∂∑ (MSC 10%°¢§Ω§Œ¬æ…‘ÿ)
MPLAB SIM §√§∆°¢CCP•‚•∏•Â°º•Î§Œ•∑•þ•Â•Ï°º•»§‚§∑§∆§Ø§Ï§Î§Œ§Õ§ß°ƒ §»¥∂ø¥§∑§ƒ§ƒ¥ÀÐ…Ù ¨§Œº¬¡ı√Ê°£ §≥§Œ ¨§¿§»ΩµÀˆ§À§œ•µ°º•Ð¿©∏Ê…Ù°¢ƒÃøÆΩËÕ˝…Ù§œ•∆•π•»§«§≠§Î§Ë§¶§À§ §Î§´§ °© °ƒ§«°¢§Ω§Œ¬æ…‘ÿ§√§∆≤ø°© °˘[•≥•·•Û•»] | ||||||||||||||||
|
°˙
KHR-1Õ—ø∑∑ø•≥•Û•»•Ì°º•È°ø£À•◊•Ì•∏•ß•Ø•»
•ƒ•Ø•‚•·°º•Î•À•Â°º•π°⁄•ƒ•Ø•‚•Ì•Ð•√•»≤¶πÒ»«°€ (Webæ§À§œæ Û§ §∑)§´§È KHR-1§Úº´Œß∆∞∫Ó§µ§ª§Îªˆ§¨Ω–Õ˧Îπ‚¿≠«Ω§ •≥•Û•»•Ì°º•Î•Ð°º•…§¨¥÷§‚õ§Ø•Í•Í°º•π§µ§Ï§Ë§¶§»§∑§∆§§§Þ§π°£ °ƒ§π§¥§ØÕŒœ≈™§ •π•⁄•√•Ø°ƒ •‚•¡•Ÿ°º•∑•Á•Û§Ú ¥°π§À§µ§Ï§∆§∑§Þ§§§Ω§¶°ƒ °÷§«§‚•¥°º•Ï•ý§Ø§Û§»∞ÏΩÔ§À¥Ëƒ•§Î§Œ°◊ --- °÷£À•◊•Ì•∏•ß•Ø•»°◊§√§∆≤ø§Œ§≥§»§¿§Ì§¶°ƒ °ƒ§»ª◊§√§∆§§§ø§È°¢Àø∑«º®»ƒ§«§¡§È§√§»Ω–§∆§Þ§∑§ø°£ §Ω§√§´°ƒ§Ω§Œ£À§ §Œ§Õ°£ ≥⁄§∑§þ°£ °˘[•≥•·•Û•»] | ||||||||||||||||
| 2005/01/17 X-60 | ||||||||||||||||
|
°˙
§»§À§´§Ø¥Ëƒ•§Ì§¶
ø∑«Ø≤Ò§«∏´§øÀøºÃøø§œ§´§ §Í•∑•Á•√•Ø§¿§√§ø§±§…°¢º´ ¨§ŒºÍ§¨√Ÿ§§§Û§¿§´§Èª≈ ˝§ §§§Õ°£ º´ ¨§¨µ·§·§∆§ø§‚§Œ§Ú¬æ§ŒøÕ§‚µ·§·§∆§ø§√§∆§≥§»§œ°¢°÷ª‘æϧ¨§¢§Î§´§‚§∑§Ï§ §§°◊§√§∆§≥§»§¿§∑°£ øÕ∑¡(MH§»§´SD§»§´°ƒ)§Ú∆∞§´§π§≥§»§œº°§ŒÃÐ…∏§»§∑§∆ø¥§Œ∂˘§Àƒ…§§§‰§√§∆°¢ §»§À§´§Ø∆∞∫Ó§π§Î•◊•È•√•»•€°º•ý§Ú¥∞¿Æ§µ§ª§ §§§»°£ §œ§‰§Ø§€§Í§µ§Û§Œ•Ï•Ÿ•Î§Àƒ…§§…’§´§ §≠§„°ƒ --- §€§È§€§È°¢§‚§¶§¢§»2•ˆ∑Ó§¿§Ë°£ •µ°º•Ð•≥•Û•»•Ì°º•È§‚•‚°º•∑•Á•Û•≥•Û•»•Ì°º•È§‚õ¿˛¡ı√÷§‚¡ý∫Ó•◊•Ì•∞•È•ý§‚§º°º§Û§÷§«§≠§∆§ §§§Û§«§∑§Á°© Õæ∑◊§ §≥§»πÕ§®§∆§ §§§«ºÍ§Ú∆∞§´§∑§ §µ§§§√§∆°£ °˘[•≥•·•Û•»] | ||||||||||||||||
| 2005/01/16 X-61 | ||||||||||||||||
|
°˙
ICS PC•§•Û•ø•’•ß°º•π/ø∑«Ø≤Ò/…˜ºŸ§“§§§ø
ø∑«Ø≤Ò§Œ¡∞§À°÷ICS PC•§•Û•ø°º•’•ß•§•π-Red Version°◊ƒ¥√£§Œ§ø§·≤¶πÒ§À¥Û§√§ø§Œ§¿§±§…«‰§Í¿⁄§Ï°£ °÷§∏§„§¢°¢KO§ŒWeb•∑•Á•√•‘•Û•∞§««„§™§¶§´§ °◊§»ª◊§√§ø§È°¢∞∑§√§∆§ §§§∑°ƒ §Ω§¶§§§®§–•π°º•—°º•È•∏•≥•Û§«∏´§´§±§ø§Ë§¶§ µ§§‚°ƒ RS232C¢™PWM —¥π§Œª≈ÕÕ§¨»Ω§Ï§–º´∫Ó§π§Î§Œ§À°ƒ (ª˛¥÷§ŒÃµ¬Ã) --- ROBO-ONE(?) in °÷•Ì•Ð•√•»π•§≠∂¶§Œø∑«Ø≤Ò°◊ §œ¡∞≤Û§ŒÀ∫«Ø≤Ò§À»Ê§∑§∆§µ§È§À¿π§Í槨§Í§Þ§∑§ø°£ ¬Á≤Ò§¨∂·…’§§§∆≥∆º´§Œ•Ì•Ð§‚ƒ¥¿∞§¨ø §Û§«§§§ÎÕÕª“°£ (§®§Û§—§Ø§¨ ‚§Ø§Ë§¶§À§ §√§ø§»§Œæ Û§¢§Í) § §∞§µ§Û§Œ£⁄•¨•Û•¿•ý°¢•§•´•Ì•π§µ§Û§Œ•œ•§•—°ºKHR1§¨∞ıæð≈™§«§∑§ø°£ §Ω§Œ¬æ§À§‚°¢øß°π§ ¿Ω∫Ó√Êæ Û§¨§¢§√§ø§±§…°¢§Ω§Ï§œ¬Á≤Òª˛§Œ§™≥⁄§∑§þ§»§§§¶§≥§»§«°£ ¿Ω∫Óº‘§¨∏¯≥´§π§Î§ƒ§‚§Í§À§ §Ï§–°¢Webæ§Àæ Û§¨Ω–§∆§Ø§Î§«§∑§Á§¶°£ ª‰§À§»§√§∆§´§ §Í•∑•Á•√•Ø§ ¿Ω∫Óæ Û§‚§¢§Í§Þ§∑§ø°£ (§¢§°°ƒ§Þ§ø¿Ë±€§µ§Ï§¡§„§√§ø°ƒ) § §º§´TV•´•·•È§¨2¬Ê§‚≤Û§√§∆§§§Þ§∑§ø°£ --- §‰§√§—§Í…˜ºŸ§“§≠§Þ§∑§ø°£ ¥®§§√ʧÚΩ©Õ’∏∂§Þ§«≈≈º÷§«π‘§Ø§Œ§œÃµÀ≈§«§∑§ø°£ °ƒ§√§∆§§§¶§´°¢¿Ó∫Í(ªœ»Ø±ÿ)§«§ŒΩ–»Ø¬‘§¡≈≈º÷§Œ•…•¢§Ú¡¥…Ù≥´ ¸§∑§ø§Þ§Þ§À§π§Î JR §¨∞≠§§°™ ø∑Ω…∑–Õ≥§«æÆ≈ƒµÞ§«µ¢§Ï§–Œ…§´§√§ø°ƒ °˘[•≥•·•Û•»]
2005/01/13 X-64
|
|
°˙
MSC 3.0 •Ì•∏•√•Ø∫∆°π —ππ
≥∆•µ°º•Ð§ÿ§Œ•—•Î•π…˝§ÚΩËÕ˝§π§Î§ø§·§À°¢•ø•§•Þ£±§Ú∆…§þπ˛§Û§«16•”•√•»§Œ»Ê≥”§Ú§∑§∆°ƒ§»§§§¶•Ì•∏•√•Ø§ÚπÕ§®§∆§§§Þ§∑§ø§¨°ƒ CCP•‚•∏•Â°º•Î§Úª»§√§∆•≥•Û•⁄•¢•Þ•√•¡§π§Ï§–§§§§§Œ§«§∑§ø°£ §≥§Ï§«§‚§√§» ¨≤Ú«Ω§Úæ§≤§È§Ï§Î§´§‚°£ §´§ §Í•‚•¡•Ÿ°º•∑•Á•Û•¢•√•◊°£ §«§‚°¢ΩµÀˆ§Œø∑«Ø≤Ò§À§œ≈˛ƒÏ¥÷§ÀπÁ§§§Þ§ª§Û°ƒ --- ª≤πÕ°ß •ø•§•Þ°º£±§«•≥•Û•⁄•¢•Þ•√•¡≥‰§Íπ˛§þ (TekuRoboπ©∫Óºº°⁄£≤¬≠ ‚π‘•Ì•Ð•√•»§Ú∫ӧͧø§§øÕ§Œ ≥∆Ƶ≠°€) °˘[•≥•·•Û•»]
2005/01/11 X-66
|
|
°˙
(URL•·•‚)°÷∞¬¡¥§ •Ì•Ð•√•»°◊§Œ¥Ωý§»§œ°©
#µ≠ªˆ§À§‚•≥•·•Û•»§∑§ø§±§…°¢µøª˜•»•È•√•Ø•–•√•Ø§√§∆§≥§»§«°£ slashdot.jp §´§È °÷∞¬¡¥§ •Ì•Ð•√•»°◊§Œ¥Ωý§»§œ°© •Ì•Ð•√•»§Œø»ƒπ°¢Ω≈ŒÃ°¢∞Ð∆∞¬Æ≈Ÿ°¢ªË¬Œ(°©)§ŒΩ–Œœ§À±˛§∏§∆ °÷º´ ¨§Œ§Ω§–§ÀøÕ¥÷§¨§§§Î§´§…§¶§´§Ú»ΩƒÍ§π§Î«ΩŒœ°◊ §Œº¬¡ı•Ï•Ÿ•Î§Úµ¨ƒÍ§π§Ÿ§≠§´§‚°£ °÷≈Îæ˺‘(§Þ§ø§œ¡ýΩƒº‘)§»§Ω§Ï∞ ≥∞§ŒøÕ¥÷§Ú∂Ë Ã§π§Î«ΩŒœ°◊§‚¥Þ§·§∆ øÕ¬Œ•ª•Û•µ§»ªÎ≥–•ª•Û•µ§Ú¡»§þπÁ§Ô§ª§Ï§–°¢º´ ¨§Œ§Ω§–§À§§§Î§Œ§¨øÕ¥÷§ §Œ§´•Þ•Õ•≠•Û§ §Œ§´§Ø§È§§§œ»Ω√«§«§≠§Î§Œ§´§ °ƒ §√§∆°¢π©∂»Õ—•Ì•Ð•√•»(¿∏ª∫•È•§•Û§»§´§«§ƒ§´§¶§Ë§¶§ )§¿§»°¢¥˚§À§≥§Ï§Ø§È§§§œ§«§≠§∆§Î§Û§«§∑§Á§¶§´°© --- °÷œ”§À•»•Î•Ø•ª•Û•µ§ƒ§±§∆¥¨§≠π˛§þª˛§Àº´∆∞ƒ‰ªþ°◊§ §Û§∆§§§¶§Œ§œ°¢º÷§Œ∞¬¡¥¥Ωý§»∆±•Ï•Ÿ•Î§¿§»ª◊§¶§Œ§«Ω¸≥∞ °˘[•≥•·•Û•»]
2005/01/11 X-66
|
|
°˙
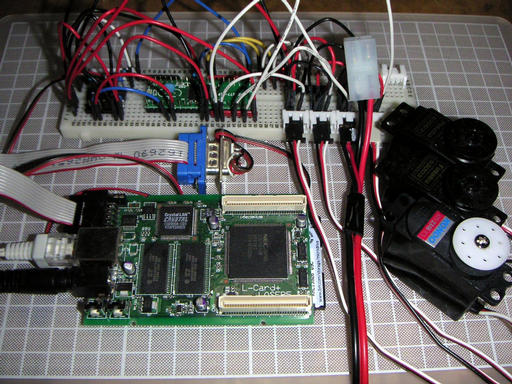
•∆•π•»Õ—§ŒPIC§¨°ƒ
°÷ª∞œ¢µŸ§Àø ƒΩ§ §∑§∏§„§Þ§∫§§§«§∑§Á°ƒ°◊§»ª◊§√§∆°¢ •÷•Ï•√•…•Ð°º•…æ§À•∆•π•»¥ƒ∂≠∫Ó§√§∆ °÷§Û§∏§„•∆•π•»≥´ªœ°™°◊ §»≈≈∏ª§Ú∫π§∑π˛§Û§¿§È°ƒ §Ω§Ï§œ 14V§Œ≈≈∏ª•≥•Õ•Ø•ø§«§∑§ø°£°≤|°±|¢˛ ø∑… §Œ AKI-PIC 16F877-20/IC•π•ø•Û•◊§œ ADM3202(RS232C•Ï•Ÿ•Î•≥•Û•–°º•ø)§»§»§‚§À§™À¥§Ø§ §Í§À°ƒ §¢§≠§È§·§∆Àл÷¥ƒ∂≠§ŒPIC§Úª»§§§Þ§π°£ °˘[•≥•·•Û•»]
|  MSC 3.0 •∆•π•»¥ƒ∂≠
2005/01/08 X-69
|
|
°˙
(URL•·•‚)§¢§‰§ƒ§ÍøÕ∑¡§œª“ºÈ≤Œ§Ú∏˝§∫§µ§ý§´
•ø•§•»•Î§œ∞’ã…‘ÿ°ƒ L.Entis§µ§Û§Œ∆¸µ≠ ∑–Õ≥ ∆»¡±∆»¡ˆ°™À»¯•þ•∑•Â•È•Û ∑–Õ≥ VOCALOID§Œ•«•‚•⁄°º•∏ °÷MEIKO°◊§Œ•«•‚§œ§¡§Á§√§»"?" §«§∑§ø§¨°¢°÷LOLA°◊§Œ§œ§Ω§Ï§ §Í§Àƒ∞§≥§®§Þ§π°£ ∆¸ÀÐ∏ϧ¿§»»˘Ãا •¢•Ø•ª•Û•»§Œ∞„§§§¨µ§§À§ §Î§Œ§´§ °£ §≥§Ï§œYAMAHA§Œ≤Œ¿ºπÁ¿Æ•Ω•’•»•¶•ß•¢VOCALOIDÕ—§Œ•Ð°º•´•Î•È•§•÷•È•Í§Œ•«•‚§«§π°£ »Ø«‰§∑§∆§§§Î§Œ§œ•Ø•Í•◊•»•Û°¶•’•Â°º•¡•„°º°¶•·•«•£•¢ (VOCALOID¥ÿœ¢§ŒURL§œ§≥§√§¡) §≥§Ï§Þ§«±—∏ϕаº•´•Î§¿§±§¿§√§ø§Œ§¨°¢∆¸ÀÐ∏ÏΩ˜¿≠•Ð°º•´•Î§Œ•È•§•÷•È•Í°ÿMEIKO°Ÿ§‚»Ø«‰§À§ §√§ø§Û§«§π§Õ°£ ¡»π˛§þOS§«§‚•Í•¢•Î•ø•§•ýπÁ¿Æ§«§≠§Î§»§§§§§Œ§À§ §°°ƒ --- 2005/01/08 22:00 ƒ…µ≠ LOLA§Œ°÷Without You°◊ §œ•–•√•Ø•≥°º•È•π§¨ LOLA §«•Í°º•…•Ð°º•´•Î§œøÕ¥÷§«§∑§ø°£(¥¿ LOLA§¨•Ð°º•´•Î§∑§∆§Î°÷Little Bird°◊§ÀΩ§¿µ --- 2005/01/09 11:22 ƒ…µ≠ §»ª◊§√§ø§È°÷Little Bird°◊§‚•Í°º•…•Ð°º•´•Î§œøÕ¥÷§«§∑§ø°£(¥¿ °˘[•≥•·•Û•»]
2005/01/07 «Ø≤Ïæı∫Ó¿Æ°ı≈Í»°¥∞Œª
|
|
°˙
«Ø≤Ïæı∫Ó¿Æ°ı≈Í»°¥∞Œª
£∂∆¸§ŒÃΧÀ§ §√§∆§Ë§¶§‰§Ø¥∞¿Æ°£ ∫£∆¸§Œƒ´°¢≈Í»°§∑§∆§≠§Þ§∑§ø°£ ∞ߪ¢ÃçŒÕæ«Ú§Àº´…Ƨ«•≥•·•Û•»§ÚΩÒ§§§ø§Œ§«§ª§√§´§Ø§Œ•Ï•§•¢•¶•»§¨¬Êõ§∑§À°ƒ(¥¿ Õ˫اœ∞∏ÃæÃçÀ•≥•·•Û•»§∑§Ë§√§»°£ ºÃøø¡™§”§ÚºÍ≈¡§√§∆§Ø§Ï§∆§¢§Í§¨§»§¶§«§∑§ø°£ °‰ IRCÀø•¡•„•Û•Õ•Î§Œ ˝°π --- §√§∆°¢£∑∆¸§Œƒ´§ÀΩ–§∑§ø§Èæ槌∆‚§Œ¥÷§À∆œ§´§ §§§∏§„§Û°£ °˘[•≥•·•Û•»]
|  2005«Ø «Ø≤Ïæı | ||||
2021«Ø:
1Q
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø