まじかる☆マリオネット: 開発日誌 (2006 1Q)
TOP
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
| 2006/03/31 X-35 | |
|
★ 23:02
(作業メモ)動作中のバッテリー電圧 (その2)
| |
|
★ 18:46
作業できない…
| |
|
★ 14:22
(URLメモ)ROBO-ONE GP 公式サイト
ROBO-ONE公式ページでアナウンスが出てました。 ROBO-ONE GP OFFICIAL SITE 「レフリー小林の俺が法律だ!」がいい感じです。 捨て身技連続にはイエローカードばんばん出そうよ。 ロボファイトの「ヒキョウモノ判定」と同じ扱い。 大技は決まると面白いんだけどね… 参考: ロボット野郎はカッコ良く戦え!! (ロボットフォース) [☆コメント] [△先頭へ] | |
| 2006/03/29 X-37 | |
|
★ 23:58
イトーレイネツさんは太っ腹
午前中に行こうと思っていたけど、途中で渋滞にはまって挫折。 仕事が終わった後再チャレンジして何とか7時ちょっと過ぎに到着。 予想はしていたものの、かなりパーツに偏りが… YDHの上半身が一杯余ってるのに太腿フレームと直交パーツは跡形もない… (T-T ServoCreation Option2 の膝フレームが現行ゴーレムくんに使えそうなのでいただいてきました。 ああ…無理してでも月曜日に行っていれば… 欲しいものはちゃんと吉村さんに発注しなさいってことかな。 さらにネジ浅井さんのサンプルネジから(低頭3x6)を10個ほどいただいてきました。 ネジの浅井さんも太っ腹! さらにさらに結局何も買わなかったのにお茶をいただいてしまいました。 アールティさんも太っ腹っ! --- 買おうと思っていたものが無かったんですよっ (いいわけ) --- やっぱり平日に車で都内へ行くのはやめよう。 [☆コメント] [△先頭へ] | |
|
★ 1:25
(作業メモ)動作中のバッテリー電圧
ずっと気になっていた充電状態や電池パックでの差を測ってみました。 (Lは股関節ピッチと足首ピッチの軸間距離) GP 1800mAhパック (充電後2日:充電時容量1200mAh) 無負荷(PIC/L-Cardのみ) : 7.41V 準直立姿勢(h.dat L=140) : 6.95V 歩行準備姿勢(wh.dat L=130) : 6.2V〜6.3V (軽く背中を支えると6.5〜6.7V) 一歩目踏出姿勢(w_060323-2.1.ru) : 6.2V Toshiba 2300mAhパック (充電直後:充電時容量1920mAh) 無負荷(PIC/L-Cardのみ) : 8.49V 準直立姿勢(h.dat L=140) : 7.95V 歩行準備姿勢(wh.dat L=130) : 7.7V 一歩目踏出姿勢(w_060323-2.1.ru) : 7.6V Toshiba 2300mAhパック (充電後数歩動かした後) 無負荷(PIC/L-Cardのみ) : 8.09V 準直立姿勢(h.dat L=140) : 7.65V 歩行準備姿勢(wh.dat L=130) : 7.45V 一歩目踏出姿勢(w_060323-2.1.ru) : 7.27V どおりで1800mAhのパックじゃ歩けないわけね。 2300mAhのパックで歩行中に前へ倒れるのはトルク補正が効きすぎてると… φ(. .*) メモメモ リアルタイムに電圧測定して補正値を調整するしかないかな… [☆コメント] [△先頭へ] | |
|
★ 0:34
(URLメモ)FitDESIGN (PICマイコン関連)
A/Dコンバータまわりの回路をどうすればいいか Google で探してたら見つけたのでメモ FitDESIGN このサイトは主にPICマイコンを題材にして、電子技術者や趣味の電子電子工作のための情報を発信して行きます。 第7章 A/Dコンバータ (中略) --- 関係ないけど、某所はすでに嵐がいくつも通りすぎた模様。 明日の午前中に行くつもりなんだけど何も残ってなさそうな… [☆コメント] [△先頭へ] | |
| 2006/03/27 X-39 | |
|
★ 21:25
アールティ行けなかった (T-T
午後からお休みにしてアールティへ行くつもりだったのに… 体調悪くて午前中お休みしてしまいました。 行けるのは水曜日の夕方かな… 水曜日に残ってるパーツあるんだろうか… うっちーのWegWeiser製作日誌に出てる写真を見ると旧ServoCreationと組み合わせて使えそうなパーツが一杯ありそう。 SC-EZA使ってる人達はパーツ合わないんだから残しておいてーー (懇願 [☆コメント] [△先頭へ] | |
|
★ 0:33
ROBO-ONEアンテナ
いつのまにか登録URLが300件に届きそうな「ROBO-ONEアンテナ」ですが… 皆の更新頻度が高くなったせいか、一日分が一ページに入らなくなってきました。 「主要処」も見にくくなってきたので、二重登録(トップページとブログの両方等)しているサイトは一件にまとめようと思います。 --- アンテナのドメイン名(marionette.mtlab.jp)を変更して「まじかる☆マリオネット」のURL(http://marionette.mtlab.jp/)から分離するかもしれません。 (マリオネット側のGoogle検索優先度が高くなりすぎるみたいなので) --- 2006.03.27 00:42 追記 と思ったけど、一件にまとめるとどこが更新されてるか判んなくなるから余計に面倒になりそう。 やーめた。(笑 [☆コメント] [△先頭へ] | |
|
★ 0:17
遊脚を上げるタイミング
| |
| 2006/03/26 X-40 | |
|
★ 13:47
まずは確実な歩行を
| |
|
★ 13:39
ロボファイト3 エントリー
| |
| 2006/03/23 X+5 | |
|
★ 2:15
歩けるようになったけど…
| |
| 2006/03/22 X+4 | |
|
★ 23:22
また歩けなくなってる…
| |
| 2006/03/21 X+3 | |
|
★ 22:10
ROBO-ONE 第9回 感想
今回の大会では、前田さんのOmniZero.2の走りを見られたのが一番嬉しかった。 次はあの走り(というかバランス制御)を目指そう。 --- 「Robot-Fan.net」の「今週のオススメ!!ロボット動画」で OmniZero.2 の映像を見られます。 --- あと、「捨て身技」の判定があいかわらず微妙。 同じ方向への捨て身技は「手や頭の向きが違っても同じ」にしようよ。 結果的に飛びこんで頭突きするのは同じじゃん。 snさんのROBO-ONEレポート(散財心理学実習講議200X)によると、決勝前の説明では レフェリーの小林さんから、今回のルールに解説が入ります。今大会は、所謂GPルール。自ら倒れこみつつ攻撃する、ダッシュアタックタイプの捨て身攻撃に関しては、同一種の攻撃は、一回につき一度のダウンしか認めない、また類種の攻撃(右側へのダッシュと左側へのダッシュなど)に関しては、一つの攻撃として扱う、と言うとのこと。 ってことだったのに、同じ方向の捨て身技が多用される場面が何度かありました。 [☆コメント] [△先頭へ] | |
| 2006/03/19 X+1 | |
|
★ 21:46
第9回大会終了 (ゴーレムくんは…)
優勝:光子力研九所の「マジンガア」 準優勝:杉浦ファミリーの「ダイナマイザー」 三位:ゆ さんの「ivre(イーブ)」 でした。 ゴーレムくんは??? あーーうーーえーー …っと 残念ながらまたしても「棄権(資格審査すら受けず)」となりました。 どんなにモーションを作り直しても前進(一歩目)が安定せず、観念して金曜日の午後をつぶしてセンサ回路を作っていたわけですが… 原因は「ひざサーボのホーン取り付けネジの緩み」 orz ぅぅ…とっても初心者なミス これに気付いたのは「棄権します」と伝えたあと。 実際には「気付いた」のではなく、控え室でゴーレムくんの歩行を見ていた人から指摘されて判ったという… ま、まあ、「ネジが緩むくらいにちゃんと動かせるようになった」ってことで諦めるしか… つ、次こそはきっと。 (特撮ヒーロー番組の悪役かよ) --- 前日に会場そばのホテルに泊まるのは有効そうなので次回もそうしよう。 (というか次回は山形だから泊まるしかない) --- ゴーレムくん歩行動画は明後日にでも撮影します。 [☆コメント] [△先頭へ] | |
| 2006/03/17 X-1 | |
|
★ 23:08
X-12h 行ってきます
| |
|
★ 15:20
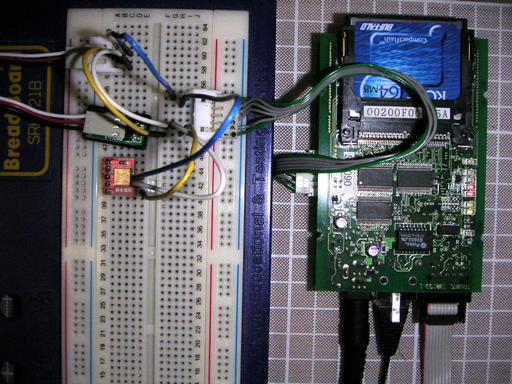
ジャイロ、加速度センサのテスト
「いまごろ何を…」感がありますが、ジャイロ(KRG-3)と加速度センサ(浅草技研製3軸)を L-Card のA/D入力につないでテスト L-CardのA/D入力ピン取り出しは去年のROBO-ONE SPの時に終わってたんだけど、センサを取り付けたのは初めて。 「おおっ!読める読めるぞ!私にもセンサの値が読める!」 (言わないってそんなこと) ちゃんと動作するようなので、センサ配置用の基板を作らなきゃ。 --- KRG-3 の応答性 0.4Hz は、やはり 0.4KHz の誤植だと思われます。 --- 問題は L-CardのA/D入力は3chしかないこと。 8chのA/Dのうち4つがタッチパネル、1つが AUDIOIN に割り当てられてて、電圧測定につかえそうなのは3つだけ。 (アナログセレクタICを入れれば切り替えて読めるのかな) [☆コメント] [△先頭へ] | |
| 2006/03/16 X-2 | |
|
★ 2:12
こ、これまでの努力はいったい…
| |
|
★ 0:00
出力全開だっ
| |
| 2006/03/14 X-4 | |
|
★ 18:59
大会直前スパーリング!
アールティ のトップページでアナウンスされてる 「ROBO-ONE練習用スパーリング相手募集」 メタちゃん、アフロ、R-BlueX って スパーリング相手は大会前にボコボコにされてしまうような… 金曜日の午後に行きたいけど…そのころはまだハンダごて握ってる気がするする(汗 実質あと3日しかないけど頑張ります。 [☆コメント] [△先頭へ] | |
|
★ 0:19
逃げちゃダメだったら
| |
| 2006/03/12 X-6 | |
|
★ 15:31
ニッケル水素バッテリーパックがお亡くなりに
| |
|
★ 15:16
進捗ゼロ
| |
| 2006/03/10 X-8 | |
|
★ 23:56
歩行シミュレーション
| |
|
★ 23:46
(URLメモ)coLinux関連URL
参考にしている(現在進行形)ページ
週末にはクロスコンパイル環境作れるかどうか試さないと… [☆コメント] [△先頭へ] | |
| 2006/03/09 X-9 | |
|
★ 23:18
coLinuxセットアップ
#実際に作業したのは先週 ちょっと前にインストールしようとしたら 「このコンピュータのLANアダプタ が使用するIPアドレスは192.168.0.1に設定されます」 とかメッセージボックスが出て 「ちょ、待って、それ私が使ってるIPアドレスですからっ!」 状態になってインストール中止してそのままになってました。 Armadilloの開発環境CD-ROMに coLinux が入ってたこともあって再調査。 どうも、Windows 2000 に入れる場合は WinPcap というネットワークブリッジ用のドライバを入れないとダメみたい。(ダメというかルータ型での利用しかできない) 結局、インストールをする上で WinPcap の設定が一番キモでした。 一番参考になったのは。 雑木林とコンピュータ (どなたかのブログ)の 2005.03.27 coLinux 0.6.2でWinPcapのブリッジ接続、解決 (3/27) でした。 「Windows2000側のネットワーク接続名を変更する必要がある」 なんて思いつかないですよ。 (ちゃんとマニュアル読まないからだけど) とりあえず Debian を入れるとこまで完了。 これに4年前のL-Card用クロスコンパイル環境を入れられるのかな… (しかも RPM だし) うまく動いてくれれば Cygwin から卒業できるのだけど。 [☆コメント] [△先頭へ] | |
| 2006/03/08 X-10 | |
|
★ 22:01
今日のお買物 (スチレンボード、ガンダムマーカー、スパイラルチューブ、ビーズ)
ストレスがたまりすぎたのか朝からため息ばかりの今日。 お昼ご飯の時にとなりのブースの人から 「◯◯さん最近ため息ばかりですねー」 と言われてしまいました。 き、聞こえてたのかっ Σ('o';) あまりに辛かったので、明日作業予定だったサーバ入替は延期にして、定時退社。 「ヨドバシカメラに寄って化粧水を買っていこう」 (川崎のヨドバシには化粧品売り場があります) と思って、ちょっと立ち寄るつもりだったのに、お店を出たときにはスチレンボードとガンダムマーカーとスパイラルチューブを持ってるのは何故。 その後、サブウェイでサラダを食べていたら、無くなったと思っていたビーズショップの広告を見つけて7Fへ。 と、目的外の楽器屋のピアノ売り場で癒されてみたり。 ビーズショップでは前々から考えてた物を作るための材料を調達。あ、でもカシメ買うの忘れちゃった。 第9回大会には間に合わないかも… お昼休みに作ろうかな。 [☆コメント] [△先頭へ] | |
| 2006/03/07 X-11 | |
|
★ 19:28
進捗 (まだ前進のモーション作成中)
あ、あと10日しかない (汗 まだスクリプト自動再生プログラムできてないのに… まだ前進モーションが安定しません。 背中におもり付けるかわりに重心ずらしたら腰ピッチサーボ死んじゃったし… 今日、モーションジェネレータ(という名前の倒立振子歩行シミュレータ)の開発ディレクトリを整理していたら、12月頃の歩行テストのメモを発見。 こ、これ本当に自分で書いたんだろうか… (一部抜粋) 2005.12.09皆が「走り」モーションを作っている中、「歩行」で悩んでいるのは情けないです。 あ、でも隊長の新型機の方向性が「重心は上の方へ」「バネ下荷重低減」「腰ロール軸装備」なんてゴーレムくんのコンセプトに似てるから我慢しよっと。 「えーそんなの私2年前からやってましたよ」 なんてね。 嘘ですごめんなさい。 コンセプトは良かったけど、4年前のサーボとフレームでは無意味でした。 [☆コメント] [△先頭へ] | |
| 2006/03/06 X-12 | |
|
★ 15:51
今日のでんでん最高(笑
| |
|
★ 0:41
(URLメモ) 残酷な天使の…
| |
| 2006/03/05 X-13 | |
|
★ 17:39
(メモ)KONDO KRG-1の出力解析 & KRG-3、GWSジャイロ
楽天アフィリエイトリンク
 KRG-1  KRG-3 裏MAGI の KONDO KRG-1 の出力解析(2006.01.14の日記)から 基準のパルス1500usのパルスを入れてあげると、GWSみたいに先読みしてパルスの出力をしてくれるわけではなく、基準のパルス入力終了後、250us後に補正のパルスが出てきます。 あ、昨日話した「パルスの立ち下がりさえ読めばいいから簡単」っていうのはKRG-1のことだったのね。 GWSだとやっぱり両方読まなきゃダメかな… スミイさんがやっているGWSからのアナログ信号取出やりたいなぁ。 と言いつつ、KRG-3(アナログ出力ジャイロ)買ってしまいました。 問題は KRG-3 の応答性(出力値の変化周期?)が0.4Hzなことかも。(from かみさまのコメント) (KRG-1,KRG-3のリンク先は楽天アフィリエイトです) --- 2006.03.04 23:53 修正 旧:サンプリング周期が4Hz 新:応答性(出力値の変化周期?)が0.4Hz [☆コメント] [△先頭へ] | |
|
★ 17:04
(URLメモ)サーボホーンの外し方、PRS-321ファイナルギア
メモが多すぎて日記に書き切れない…まとめて書いちゃえ SISO JUNK STUDIO BBS (1719,1720 : 2006.01.15) PRS-321 ファイナルギヤの取付構造 & ポテンショの微調整について 吉村さんの日記(2006.03.04)から 外れないサーボホーンの抜き方 (ページのタイトル変ですよ > かみさま) 最初に読んだとき、なぜこれで外れるのか判らなかった私です。 [☆コメント] [△先頭へ] | |
|
★ 1:04
旧型アルミホーンいただけることになりました
一昨日の日記に書いた「ローハイトじゃないKOアルミホーン」ですが、 おかださんから譲っていただけることになりました。 ありがとうございますー。 --- 練習会の時に皆にサーボホーンのことを聞いたら、 誰も一昨日の日記を読んでなかったって… そ、そういえばONOさんの壁新聞にもスルーされてて… …と、ROBO-ONEアンテナを見てみると更新日時が 3/1 のまま。 はうっ、日記更新時にトップページの更新時刻を修正するプログラムが間違ってる…orz そっかぁ…それで誰も日記見ていなかったのね。 (正確には make コマンドで日記と日記一覧とトップページの更新時刻を自動調整しています) [☆コメント] [△先頭へ] | |
| 2006/03/04 X-14 | |
|
★ 23:35
関東ロボ練 (今日は歩けなかった)
「ろぼれん」で変換すると「ロボ連」になるのはどうかと… (「関東ロボ連」って珍走団みたいじゃんか) #今回も写真撮り忘れました。 先週の練習会で前側に倒れたので、重心が後になるように腰ピッチと腕を調整したのですが… 歩くには歩くんだけど、後にそっくり返ってて格好悪い。 …というか前足に体重乗らなくて後に転んでるし。 会場のアールティに到着したのが16:30過ぎで、あまり調整する暇もなく終了。 大会まで残り2週間なのに… で、帰り支度を始めたら、腰ピッチのサーボが固まってて動かない! Σ('o'; がーん 上体を後に反らせたせいで過負荷になったのかも… 貴重な PDS-2144 だったのに。 KRS-2350を実戦投入することになりそうです。一緒に SC-EZA も投入かも。 いつも練習会のとりまとめおつかれさま > 石川さん 来月もよろしくです。 --- 半年ぶりに秋葉へ行ったのだけど、駅周辺の変わりっぷりに驚き。 昭和通りと中央通りに挟まれた空間は全然別の街。 あんなの秋葉原じゃない! (ぇ [☆コメント] [△先頭へ] | |
| 2006/03/03 X-15 | |
|
★ 0:54
急募! ローハイトじゃないKOアルミホーン
| |
| 2006/03/01 X-17 | |
|
★ 22:58
「弥生」三月ひな祭り
| |



| 2006/02/28 X-18 | |||||
|
★ 22:17
宿確保
| |||||
|
★ 1:35
参加費振り込み
| |||||
| 2006/02/27 X-19 | |||||
|
★ 22:10
作業方針メモ (歩行モーション&バッテリー容量)
関東ロボ練#5で気付いたことをメモ
最優先課題は「事前審査通過」。 優先作業は「起動スイッチ処理の実装」と「自律型モーションプレイヤーの実装」 リポ化、メインCPU換装は 3/4の練習会#6以降に時間的余裕があれば… [☆コメント] [△先頭へ] | |||||
|
★ 12:44
(URLメモ)ストライクNOVA!
お昼休みにアンテナチェックしてて見付けました。 おもわず声を出して笑っちゃうところでした。 Notch Room (武蔵工業大学 機親会学生会) のトップページ画像。 素敵です。いい仕事してます。 (どうせなら本体も塗っちゃいましょうよ) [☆コメント] [△先頭へ] | |||||
| 2006/02/26 X-20 | |||||
|
★ 1:54
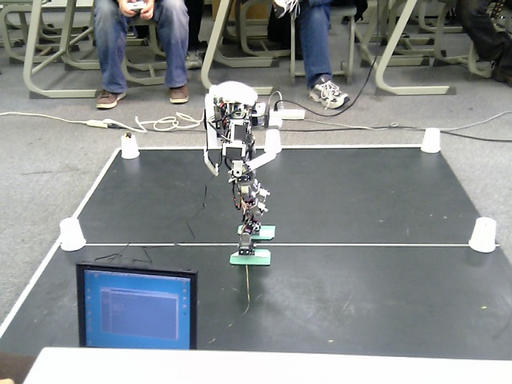
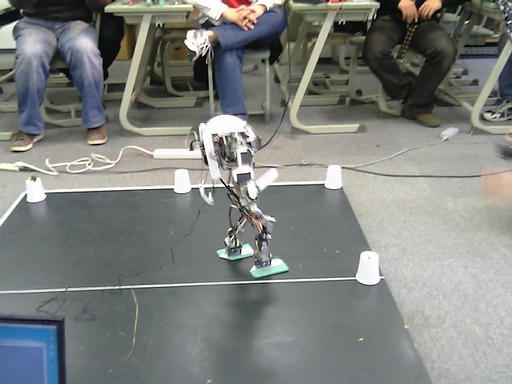
関東組練習会参加 (ようやく歩行を御披露目)
 今日の得点表 3ヶ月ぶりに関東組ロボット練習会に参加。 例によって到着したのは終了2時間前だったり… ゴーレムくんが歩くところをようやくみんなに見せることができました。 (…と言っても直進しかできないんだけど) そ・し・て ロボットビリヤード(参考:snさんの日記 2006.01.21)で1ポイントゲット! (2、3歩進んで倒れたら運良くターゲットに当たっただけ) ふふふ… これで「あの背丈とあのサーボでは歩けない」と言われていたのを覆すことができました。 次回(来週)までに方向転換と起き上がりを作らなきゃ。 --- 王国から「アナログ出力ジャイロは在庫切れですよん」ってメールが来てました。 「3月頭入荷予定」って微妙… [☆コメント] [△先頭へ] | |||||
| 2006/02/24 X-21 | |||||
|
★ 1:59
進捗 (バグバグ…一進一退)
| |||||
| 2006/02/23 X-22 | |||||
|
★ 23:59
今日のお買物 (KRG-3、ジュンフロンケーブル、シリコンケーブル他)
ひとつ前の日記「KRG-3 誰か使っていますか?」に吉村さんからコメントいただいて、仕様がわかったので早速注文。 一緒にジュンフロンケーブルとシリコンケーブルとリポのコネクタのオス側を購入。 したつもりだったんだけど、コネクタ違うの買っちゃってる… 週末に届くかな。 [☆コメント] [△先頭へ] | |||||
|
★ 12:41
ジャイロセンサー:KRG-3 誰か使っていますか?
PIC側からメインCPUにデータを送れるようになったので、センサーまわりも並行して作業。 近藤科学からアナログ出力ジャイロ:KRG-3(リンク先ロボット王国)が出ているので、これを入手しようと思ったのですが… 王国のページには電源電圧や出力電圧の情報がなく、近藤科学のページには製品情報すらありません。(見つけられないだけ?) 多分、加速度センサー:RAS-1と同じで、電源電圧 3〜5V、出力は角速度0で電源電圧の1/2、角速度に応じて上下 だと思うんですけど… 王国にWebから問い合わせを出していますが、情報をお持ちの方がいらしたら教えて下さい。 …なんて、聞く前に買っちゃった方が早い? [☆コメント] [△先頭へ] | |||||
| 2006/02/21 X-25 | |||||
|
★ 18:45
進捗 (バッテリー電圧測定対応中)
とりあえず、PICからメインCPUに任意の値を送信するところまで完了。A/D変換処理の実装は後回し。 い・ま・や・る・べ・き・な・の・は 週末の練習会に向けて歩けるようにすること。 2005.12.20の日記 に書いたように、踏み出し時に上半身が遅れてしまうのをなんとかしなきゃ。 --- 公式ページの選手情報に R-Blue の画像が載りましたね。 「もしかして…」と思ってたけど、逆関節は冗談でしたか(笑 でもあれで 2.6Kg ってすごい。 [☆コメント] [△先頭へ] | |||||
| 2006/02/16 X-30 | |||||
|
★ 21:58
今日のお買物 (リポ、充電器、バランサ、その他)
Air Craft JapanのWebで注文しました。 (値段はR/C Hobbyの方が安いです) 充電器とバランサを1つずつ、急速充電用の接続コネクタ1つ、バランサ直列化に使うコネクタ、そしてリポを4つ (値段は単価です。リンク先はAirCraftJapan) HP-EOS5I (Hyperion EOS 5i Speed 5S14N CHARGER) 1個 \9,333 HP-EOSLBA6 (Hyperion EOS LBA6) 1個 \4,552 HP-EOSLBA-MC-H4H (LBA 6 HiAmp Harness 4S) 1個 \428 HP-EOSLBA-MC-A4 (FEMALE Adapter Side for 2S〜4S) 2個 \180 HP-EOSLBA-MC-P4 (5-pin PACK SIDE for 2S〜4S) 1個 \209 ET-HPV3-1000-2S (1000mAh 2S PACK - 7.4V) 4個 \3,219 --- 商品合計 \27,758 送料 \600 (代引手数料\200含む) 消費税 \1,388 合計 \29,746 約3サーボ。あと、JSTコネクタを入手しないと。 まず、PICでバッテリー電圧測れるようにしなきゃね。 25日の練習会には間に合わないだろうな… [☆コメント] [△先頭へ] | |||||
| 2006/02/15 X-31 | |||||
|
★ 12:56
「ROBO-ONE登録選手一覧」データ取得ミス
f.p.さんの日記を見ていて「エントリー数 114?あれ?数字が合ってない…」 と思ったところで気付きました。 「ROBO-ONE登録選手一覧」は定期的に「登録選手データ検索閲覧」にアクセスしてデータをとってきているのですが… 190件までしか取ってきてませんでした(汗 終了条件の判断が面倒だったので18ページ目までで処理を打ち切るようにしてたの忘れてました。 ごめんなさいです。> 見ていた方 [☆コメント] [△先頭へ] | |||||
| 2006/02/14 X-32 | |||||
|
★ 23:39
リチウムポリマーのこと(その2)
2つのリポ(2セル7.4V)を同時にバランスしながら充電するにはどうすれば…と悩んでいて 「1つの充電器にバランサを並列につないでそこにリポを接続すれば…」 などと考えていたのですが、今ふと気付きました。 並列に充電するのではなく、2つのリポのバランス端子を直列につないで2倍のセル数のリポとしてバランサ経由で充電すればいい。 んじゃないでしょうか。 なお、失敗して炎上しても私は責任とりません。 2セルシリアル接続(2S)のリポのバランス端子には3本の線が出ています。 片方のパックの-側バランス端子と、もう片方のパックの+側バランス端子をつなげば、4セルシリアル接続(4S)のバランス端子(端子数5本)と同じ構成になります。 これをバランサに繋いで4セルシリアル接続(4S)パックとして充電。 ってことはバランサは1個買えばいいのねー ちょっとは出費が減るかな。 (バランサと充電器はハイペリオンのを買おうと思っています) 参考:TP205 Li-Poly BALANCER について (後半にバランス端子の接続図があります) (from K&S CO.,LTD) --- 他の人のリポ使用状況が新たに判りました。 ひとつ前の日記は時間があるときに整理して「資料室」に載せます。
[☆コメント] [△先頭へ] | |||||
| 2006/02/12 X-34 | |||||
|
★ 23:40
(URLメモ)リチウムポリマーのこと
# 2006.02.13 21:00 Hyperionの情報追加 何も作業できないけど少しずつでも前に… エアクラフトにメールで在庫の問合せしました。4個くらいまとめて手に入らないと困るから。 リポについて調べたこと&皆のコメントを簡単にまとめ
困ったことにどの会社のも都合のいいサイズがない。 700mAhくらいのを3並列にしようかと思ったけど、並列パックをバランスしながら同時充電する充電器があるのかどうかがわからないし… そういう充電器があれば3並列にするんですけど… お店に聞いてみたほうが早いかな? ほんとは入手性がいい製品にしたいんだけど… [☆コメント] [△先頭へ] | |||||
| 2006/02/10 X-36 | |||||
|
★ 21:42
第9回大会エントリー
| |||||
| 2006/02/06 X-40 | |||||
|
★ 23:36
エントリーの催促来てるのに進捗ゼロですよ
| |||||
| 2006/02/01 X-45 | |||||
|
★ 0:47
「如月」 むぅ…あっというまにひと月終了
| |||||




| 2006/01/30 X-47 | |
|
★ 17:29
進捗 (2ヶ月間進捗ゼロ & リポ並列のこと)
| |
| 2006/01/25 X-52 | |
|
★ 19:59
私が嫌いなWebデザイン
デザインというかページ構成というか…
個人のサイトなら趣味の問題だし仕方がないと思うけど… 企業やイベント情報サイトでこういうのがあると「ダサっ」と思います。 最近つくづく思います。 どことは言いませんが、見た目ばっかり気にしててしょうがないなぁ…と。 (でも、私のサイトは見た目を気にしなさすぎですね…:汗) [☆コメント] [△先頭へ] | |
| 2006/01/24 X-53 | |
|
★ 20:43
ROBO-ONE登録選手一覧
「他にやんなきゃいけないことあるでしょっ!」 …と思いつつ作ってみました。 委員会に怒られたら消しちゃうかも ROBO-ONE登録選手一覧 アンテナと同様に自動更新できるようにしたいです。 あと、新しいデータ順に並べ直すとか… 第9回エントリー一覧も欲しいねぇ… そ、そんなことやってないでロボ開発しなさいっ! [☆コメント] [△先頭へ] | |
| 2006/01/22 X-55 | |
|
★ 23:46
第10回大会の噂
| |
|
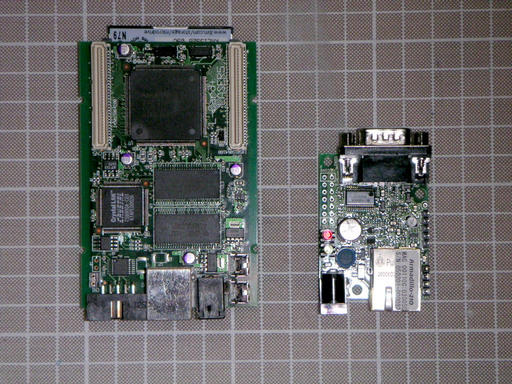
★ 21:48
Armadillo-210到着
実際には届いたのは昨日。 雪が積もってる中、佐川急便の人が配達してくれました。 L-Cardと比較(写真)すると大きさ 1/3。重さ1/2 (L-Cardの拡張カード含まず) 問題は POE(Ethernet経由の電源供給規格)対応のために入力9〜48Vになってる一次レギュレータを迂回して外部から3.3Vを供給する方法。 「レギュレータの足に半田付けすればいいかな」なんて思ってたら、めっちゃ小さいチップで半田付けなんてできそうにないです。 「回路図下さい」って言ったらもらえたりするだろうか… あと、D-Sub9ピンコネクタを外したい…けど、私のハンダ技術でやれるかな… [☆コメント] [△先頭へ] | |
| 2006/01/21 X-56 | |
|
★ 16:47
雪かき
 積雪10cmちょっと | |
| 2006/01/19 X-58 | |
|
★ 1:38
今日のお買物 (アットマークテクノ Armadillo-210)
どうしようか迷っていたけど、決めました。 L-Cardは勉強用だったと諦めてメインCPUを載せ替えます。 新しいCPUは アットマークテクノ製 Armadillo-210 CPU:ARM9 RAM:32M FLASH:4MB シリアル:2ポート、GPIO:8bit、100BASE-TX FLASHが4MBしかない上にSDカードも差せず、拡張コネクタもないけど…とにかく軽量化したい。 (I2Cのピンが基板に配線されてるといいんですけどね) あとは…リポか… (ブラケット、金属ギア、加速度センサ、メインCPU、リポの購入費でROBONOVAが買える…:汗) [☆コメント] [△先頭へ] | |
| 2006/01/17 X-60 | |
|
★ 15:02
時間を無駄にしちゃったかな…
頑屈王国ネオ(blog 2006.1.12日) によると、 関西某所にピルクスサーボをソフビ系ドールに組み込んだモノがあったらしい。 もうそこまで「萌えロボ」の波が広がってるのね… 旧型フレームとL-Cardにこだわって時間を無駄にしちゃったかな… 作業できないストレスや、そこかしこで見かけるお人形系開発の話がジワジワとモチベーションを侵蝕する今日この頃。 ゴーレムくん開発は一時保留にして、数ステップ飛ばそうかしら… [☆コメント] [△先頭へ] | |
|
★ 13:04
物資到着、あとは…
| |
| 2006/01/12 X-65 | |
|
★ 19:01
今日のお買物 (PRS-321用アルマイトファイナルギヤー、サーボホーンビス)
リンク先はRobotLabs
  放置していた PRS-321 を活用するために交換用金属ギヤーを調達… …と思ったら在庫が17個しかないらしい。今のところ入荷未定。 PRS-321が20個あるんですけど… (T-T 悩んでも仕方がないので17個発注。 ついでに金属ギヤー用のビス(15個入り)を2つ発注。 --- あと買わなきゃいけないのは、黒い奴とノートPCと17インチ以上の液晶ディスプレイ。 今年こそはロボ開発費を事業経費(試験研究費)にしたい… --- 2006.1.12 22:10 追記 買わなきゃいけないものがもうひとつ。「ミシン」 [☆コメント] [△先頭へ] | |
|
★ 1:22
昨日のお買物(PRS-3401用ブラケット、「ロボコン部品ガイド」その他)
楽天アフィリエイトリンク
    注) 製品のリンク先は楽天アフィリエイトです。 週末に秋葉行き損ねたのと、楽天ポイントが貯まっていたのとで、楽天市場のツクモロボット王国でお買物 買ったのは
週末までに届くかな… でも、週末はまだ歩行練習中だね…多分。 [☆コメント] [△先頭へ] | |
| 2006/01/11 X-66 | |
|
★ 1:20 作業項目整理
 最近のゴーレムくん (撮影:2006.01.11) 三連休で歩行させたかったのに… 二日間ベッドの上、残り一日は掃除洗濯で終了… orz あと2ヶ月しかないのにフレーム構成変更なんてできるんだろうか… (そもそもエントリー受け付けは今月だった気が) とりあえず作業項目の整理
…絶対間に合わない… 両腕変更とリポ化がやっとってとこ? [☆コメント] [△先頭へ] | |
| 2006/01/01 X-76 | |
|
★ 19:05 「睦月」 明けましておめでとうございます
| |
{kind=link}
2021年:
1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年