軽量級優勝は韓国の「Teakwon-V」、重量級優勝は「グレートキングカイザー」、
そして総合優勝は「グレートキングカイザー」でした。
高松での12thに続いて、決勝トーナメントの初戦から見ていましたが、予選通過ロボットの安定度がかなり上がっているように思います。
スリップダウンを見ることが少なくなりました。
資格審査が「坂道上り下り」になった効果かもしれません。
---
で、ゴーレムくんは…
残念ながらまた棄権記録を伸ばしただけでした。
資格審査の坂道の前まで行ったものの、スタートボタンの処理ができてなくて(馬鹿かあんたはっ!)棄権となりました。
審査の直前に「あ、駆動系の電気入れたら足踏みするようにしておけば、時間切れで失格になったのか…」ということに気づいたけど時すでに遅し。
棄権でも失格でも予選に出られないのは同じなんですけど。
---
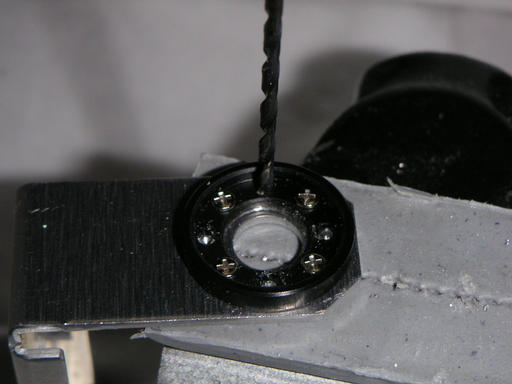
前日の時点で「今のままでは股関節のガタが大きくて安定して動かすのは無理」と決めつけ、「
残作業リスト」を無視して、ふとももサーボブラケットをSC(初代ServoCreation)からSC-EZAへ変更する作業を開始。
これをやらなければ「
二本のねじの頭をなめて無駄な時間を消費」なんて無かったのに…
五体ばらばらの状態で現地に移動し、お昼までには組み立てと原点調整まで終わったのだけど…
今回は資格審査の坂道で脱落するロボが多くて、お昼の時点ですでに半分のロボの予選が終了。「96番目は3時半くらいかな」なんて思ってたのに、2時には予選が終わりそうな気配。
お昼を食べつつ、新しい脚に合わせたモーションデータを生成し直し、午後の予選再開時には足踏みができるところまで確認。
(ひざと股関節ピッチのガタが無くなったので安定して足踏みができるようになった)
で、「前進モーションのテスト開始だー」というところで進行の小林さんから「そろそろ準備しておいてねー」という声。(多分 1時半頃)
ここでようやく、「あ、スイッチの確認しなきゃ…」と気づく。
(「
残作業リスト」に入っていたのにずっと後回しになっていた)
あわててソースを確認してみると、スイッチの読み取り処理は旧メインCPU(L-Card)用のまま…。
「えーっと現行版(Armadillo-210)のGPIOアクセスは…」と仕様書を探しているうちに「じゃあ、90番から100番まで出てくださいー」との声。
はい、ゴーレムくんの13回大会終了です。チーン
まあでも、ふとももの構成を変えなかったなら、安定した足踏みもできなかったと思います。ジャイロ処理の改善やモーション作成にまわす時間が増えてなんとかなったかもしれないですけど。
ということで、次の目標は、10月11,12日の14th@横浜パシフィコ。
の前に5月17,18日のロボファイト@大阪。
の前に4月19日の関東組練習会。
[
☆コメント]
[
△先頭へ]