まじかる☆マリオネット: 開発日誌 (2004 1Q)
2021年:
1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年




| 2004/01/31 ★ -1 < X day < 1 | |||||||||||||||||||||||||||||||||||||
|
★ X+8h 予選終了 (棄権)
結局、ただの人形から変化しなかったゴーレムくんを連れて会場へ。 事前審査が導入された第4回を棄権したからかもしれないけど… なんか、参加者のレベルが急に上がった感じ 参加者の数だけを見ても、エントリー 129チーム中、受付に来たのは 115チーム。 さらに 115チーム中、79チーム(かな)が事前審査を通過。 これって、参加者中 60%以上が5歩以上歩くロボットを作ってるってことだよね… うーん…どんどん予選通過が難しくなるなぁ… (そもそも、予選に出られるロボットが作れてないんだけど…) 予選結果は 1st: おむにすとらいかー 2nd: めたりっくふぁいたー 3rd: ばーにんぐすたー でした。 BR>(徹夜明けでぼーっとしてたから間違ってるかも) 初予選通過おめでとぉ > 宮田さん --- ゴーレムくんはなんとかしなきゃですね… 2月末の 第1 回 ROBO-ONE Special には参加できるように調整します。 --- 徹夜明けで疲れてたのと、荷物が重かったから友人の車で帰りたかったのと、連続棄 権が恥ずかしかったのとで、懇親会には出ずに帰りました。 ☆[コメント] | |||||||||||||||||||||||||||||||||||||
|
★ X-2h ごめんなさい。今回も棄権です。
ICが壊れた時点で諦めていましたが… 入れ換えた RS232Cレベルコンバータも動作が変で バタバタしてるうちに時間切れです。 手伝ってくれた方、期待してくれてた方、ごめんなさい。 お見せできるのはピクリとも動かない人形です。 まだまだ修行が足りません。 ☆[コメント] | |||||||||||||||||||||||||||||||||||||
|
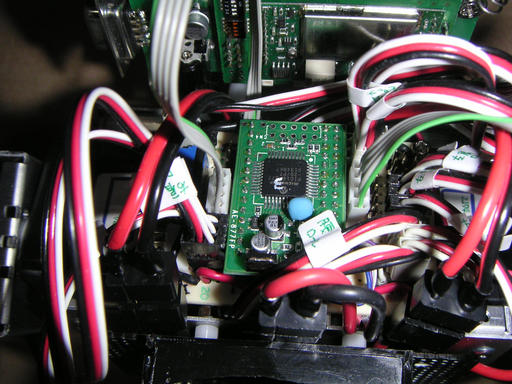
★ X-5h だめだ…終わったかも
1.7〜1.8あたり CPUとPICの取り付けが終わったところで制御系のテスト… をしてるんだけど、PICが応答しない… もしかして、3V ←→ 5V 変換の IC が死んだ? --- 2004/01/31 05:00 追記 死んでました… (T-T 予備のIC無いので 今から、別の回路に直します。 ☆[コメント] | |||||||||||||||||||||||||||||||||||||
| 2004/01/30 ★ 0 < X < 1 | |||||||||||||||||||||||||||||||||||||
|
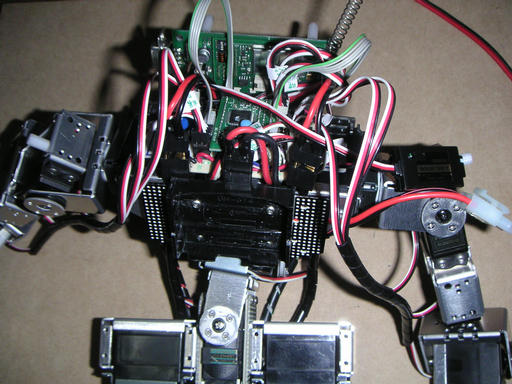
★ X-11h まだまだハードウェア周り
1.3 あたり CPUフレームのカバー作成中(転んだときに L-Card をぶつけないように) 徹夜はしないつもりだったんだけど… このままだと電気を入れられるのが 2:00 頃かな… | |||||||||||||||||||||||||||||||||||||
|
★ X-18h そろそろネジロック作業完了
今日はお仕事をお休みして追い込み中。 結局、ネジロック以外にも配線を切りそうな箇所にやすりがけしたりとかやってたの で、こんな時間に… マイスターからの荷物も受け取れたので、そろそろ 1.1の作業が終わりそうです。 --- 2004/01/30 23:00 追記 マイスターからの直々の贈り物でしたが、ネジ穴が合いませんでした…(残念 | |||||||||||||||||||||||||||||||||||||
| 2004/01/29 ★ X-1 | |||||||||||||||||||||||||||||||||||||
|
★ く◯ねこのバカーっ!
昨晩帰宅したら、不在配達票が入ってた。 ものはマイスターに頼んだパーツ(直前に頼むなよ) 配送センターに電話して 「明日の朝、取りに行くからセンターに置いておいて」 と連絡したのに… (しかも電話をたらい回しされて) 朝、センターに行ったら配達員が持って出ていた。 夜は仕事の帰りが遅くてセンターは閉まっちゃった。 今日の夜、組み立てるつもりだったのにーーーーっ! く◯ねこの配送センターにはついこないだ同じミスをされたばっかり。 大体、なんで自動受付センターで「センター留置」を指定できないのよ… 配達時間は細かく指定できるのに… ☆[コメント] | |||||||||||||||||||||||||||||||||||||
|
★ 新競技発表
ROBO-ONE Eagle …SASUKE!? 進捗は…まだ 1.1 … 1.9 足裏強化パーツ、肘から先のアルミアングル加工 が先に終了。 ☆[コメント] | |||||||||||||||||||||||||||||||||||||
| 2004/01/28 ★ X-2 | |||||||||||||||||||||||||||||||||||||
|
★ まだ、組み立て中…
ということで、まだ作業リストの 1.1 (汗 腕の部分のネジロックは後回しにして、腰と肩のネジロックが終わったら 1.2 へ。 さらに… 1.9 肘から先のアルミアングル加工 を作業リストに追加。 起き上がりをやらないなら今のままでも… ☆[コメント] | |||||||||||||||||||||||||||||||||||||
| 2004/01/26 ★ X-4 | |||||||||||||||||||||||||||||||||||||
|
★ ハイパワーギヤーって…
優先作業の 1.1 実行中。 …と、足首のサーボががたついていることに気づいて分解してみたら…。 ギアボックスの蓋の回転角ロックが無い。 一度飛ばしたサーボだったみたい。 (壊れた回転角ロックをリュータで削っちゃってた) ついでに、ハイパワーギヤーとストロングギヤーに交換しちゃえ… と思って外したのですが… (ボールベアリングは無事に外れました > 下平さん) これって…新しいギヤーを入れるときはグリス付けなきゃなのかな? グリスなんて無いんですが… 自転車のチェーン用(CRCチェーンルブ:モリブデン入り)ならあるんだけど… ☆[コメント] | |||||||||||||||||||||||||||||||||||||
|
★ 優先作業リスト
とにかく「歩行させること」が優先。 ジョイパッドとか、サーボ制御角の分解能アップとか、起き上がりとか、センサ取り付け とかは後回し 優先順の作業リスト
がんばれっ > わたし ☆[コメント] | |||||||||||||||||||||||||||||||||||||
|
★ 昨日のお買い物 (ジャイロセンサその他)
よく考えたら職人の手作り板金ってとっても贅沢なんじゃ… 土曜日に行くはずだったお買い物は日曜日にずれこみ、 さらに美容院へ行くのが遅くなって、秋葉到着は 18:50 18:30閉店の「秋月電子」はあきらめて、19:00閉店の「千石電商」へ直行 閉店アナウンスが流れる中、どうしても必要な 250KΩ抵抗と2mmビスを購入。基板ス ペーサとホルマル線(ポリエステル線)も買いたかったけど時間切れ。 次は 19:30 閉店の「つくもロボット王国」 ここで「GWS ジャイロセンサ」を2つと「KOハイパワーギヤー」を4つ購入。 (取り付ける時間があるのかどうか疑問が…) 「ZMP ジャイ ロ加速度センサモジュール」が予想よりもかなりコンパクトで心惹かれたのだけど、予 算的にちょっと無理…。 「KO BOOSTER-7」は誰かが10個まとめ買いしたらしく在庫切れ。 …制御系の消費電流が400mA以内に収まるといいんだけど… 最後は、「スーパーラジコン」で、チタンヘックスビスとシリコンケーブルとネジロ ック剤を調達。 かけずりまわって汗びっしょり。 帰宅して車を降りるときにツクモの袋を落としちゃいました… 開けてみたら、GWSジャイロセンサの外箱が割れてる! (T-T 中身が壊れてないといいんだけど… --- 「ロボット王国」では Jr. with Family と J-Class の結果をもう少しゆっくり伺い たかったです。 優勝された「三沢研究所 堀江支店」さんおめでとうございます。 このロボが 10万円台で発売されるようになると、参加者も増えてプラレスやエンジ ェリックレイヤーの世界がぐっと近付くかも。 ☆[コメント] | |||||||||||||||||||||||||||||||||||||
| 2004/01/25 ★ X-5 | |||||||||||||||||||||||||||||||||||||
|
★ 板金部品 & アンテナ部品到着
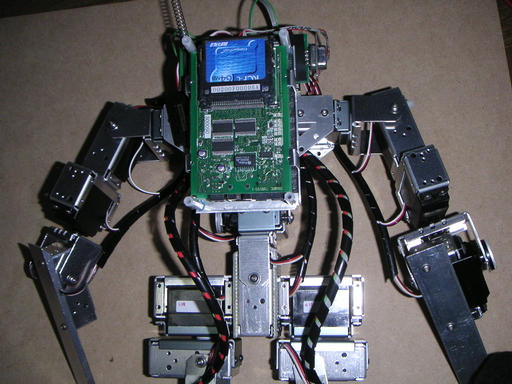
知合いに頼んでいた板金部品(CPUフレーム&胸部)到着。 ちょっと魔が差して手作業で作ってみました。 って…ありがとうございました。 手作業とは思えないような見事なでき上がりです。 金曜日の未明に注文したアンテナは土曜日の昼に到着 (早 1/4λアンテナは柔軟性があっていい感じ。 コントロール側じゃなくてゴーレムくんに付けちゃってもいいような… …と思いましたが、キット付属のヘリカルホイップアンテナのままにしようと思います。 コントロール側は 1/4λアンテナ+反射板。 30日の現地テストで状況が悪ければ、銅線で 1/4λアンテナを自作するという方針で。 コメントくれた方々、ありがとうございました。 マイスターからも返事が届いてひと安心。 部品が調達できるといいんだけど。 (届いても動かせなかったりして…) |
 胸部パーツとCPUフレーム  L-Card+ と CPUフレーム | ||||||||||||||||||||||||||||||||||||
| 2004/01/24 ★ X-6 | |||||||||||||||||||||||||||||||||||||
|
★ 微弱無線のアンテナ
気になってることがあるのですが、どなたか御存じの方は教えていただけませんか? (大学で電磁気学とか、電波工学とか単位もらってるとは思えない…) 利用する無線機は 315MHz帯の微弱無線です。
--- 2004/01/24 13:00 修正 ダイポール → モノポール --- 2004/01/24 13:30 補足 Googleで探していたらよさげな物発見。 反射板付きモノポールアンテナ 反射板を付けると指向性が上がるのね… 30cm^3 の段ボール箱の内側にアルミ箔を貼って、肩からさげようかな… (目立ちすぎるってば) ☆[コメント] | |||||||||||||||||||||||||||||||||||||
|
★ 微弱無線モジュール
気分転換と不安解消を兼ねて微弱無線モジュールのテスト 第3回大会(去年の冬)のときは PIC と VAIO の両方でなにもハンドシェイクが無かったのでデータが化けまくり… 今度はなんとかしないと… で、色々試した結果、 通信速度 : 9600bps パケット長: 1 ソフトウェアハンドシェイク: ON にしておいて、 1byte送る毎に 200msec くらい待ってあげると、文字化けもせずうまく転送できる感じ。 (ただし、今は一方向通信なので、双方向にすると待ち時間が増えるかも) 今のところ 2m まで離してもちゃんと伝送できてる。 --- 2004/01/24 03:00 追記 受信側のアンテナに 50cm くらいの銅線を付けただけで 6m まで安定した伝送ができるようになりました。 電波って奥が深い… ☆[コメント] | |||||||||||||||||||||||||||||||||||||
| 2004/01/23 ★ X-7 | |||||||||||||||||||||||||||||||||||||
|
★ 部品発注(その後)
マイスターの会社のメアドに連絡したのだけど返事が来ない… 良く考えたら週末からずっと東京なのでは… | |||||||||||||||||||||||||||||||||||||
|
★ 最後の部品発注&進捗
残り一週間の時点で部品発注しててどうするの… 発注したのは、 大会までに届くんだろうか…(汗 開発作業はあいかわらず脚部の配線。 集線基板からメインボードへの電源ラインを付け終わったところで 「あ、これってシリコンケーブルにするんじゃなかったっけ…」 と気付く… 土曜日に秋葉で最後の買い出しをするから、そのときに調達かな。 無駄になるかもしれないけど、ジャイロセンサも買ってこよっと。
2004/01/20 ★ X-10
|
★ ひたすら配線
| …のはずなんだけど… 配線のとりまわしを考えているだけで3時間消費してしまいました。 そろそろ朝型に移行しないと…大会当日に起きられない…(笑
2004/01/19 ★ X-11
|
★ 配線 & バッテリーパック作成
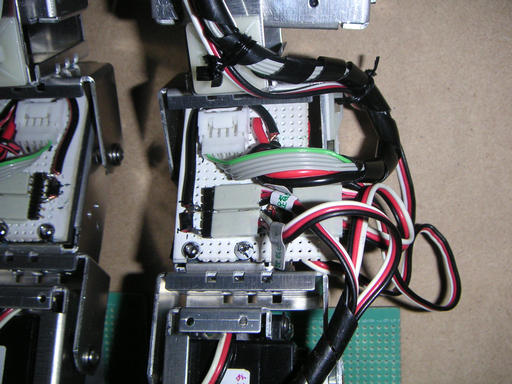
| 脚部サーボの集線基板完成。 次は… と考えていたら、「マイクロマウス工房 掲示板」で「バッテリーパックの作り方」が紹介されてるのを発見! 早速、参考にしてバッテリーパックの作成をはじめたのですが… あれ?コネクタってどっち向きに付けるんだろう… (コネクタを買ったときに売り物のバッテリのコネクタを見てなかった) と悩んで Googleの結果をたどること10分 コネクタのオスメス(HPI Japan) コネクタの極性(親切なラジコンカー専門店 Rainbow) コネクタとピンの対応(ABC Hobby) のおかげで判明。 明日は、集線基板からPICまでのケーブル作成。 時間があれば腕の配線。 火入れまでもうちょっと。
| 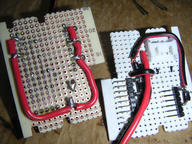 脚部サーボ集線基板(左右)
バッテリーパック作成過程
| 注意)同じ作業をおこなってトラブルが起きても責任はとりません。
2004/01/16 ★ X-14
|
★ CADセッション終了
| 終わりました… (o_ _)o ばったり こころよく引き受けてくれてありがとう。はぎゅぎゅ☆ お言葉に甘えて、胸部フレームも板金をお願いしました。 上の図のような部品を作って… 下の図のように ServoCreation をはさみます。 ようやく Pro/DESKTOP で複数部品を組み合わせられるようになったのに… あと2ヵ月で無料版の利用期間が切れちゃう… (T-T 製品版の 140,000円はちょっと手が出ない…
| 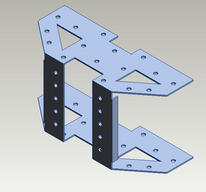 胸部フレーム 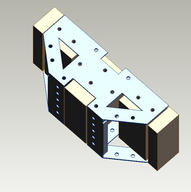 胸部組立イメージ
★ 大会スケジュール発表/神矢みのる
| 残り二週間。 CADは何とか終わったから、今日からは配線作業。 大会スケジュールも決まったらしい。 第5回ROBO-ONE大会のスケジュール 「第6回からランブル戦導入」と聞いていたけど、今回からやるみたい。 (8台でのバトルロイヤル?) あと、書き忘れてたけど、第5回の決勝には、特別解説者として神矢みのる先生が来るんだって。 参考:公式サイトトップページの 2004年1月7日 …といっても、私は原作を読んでないからあまり思い入れがないんだけど… 神矢みのる と すがやみつる を混同してたくらいだし。 (この間、知合いと やふめす してて混同してたことが発覚) 私としては CLAMPの先生方が来てくれる方が嬉しいんだけど…
2004/01/12
|
★ X-18 CPUフレーム(その3)
| 方針決めたはずなのに… 結局、CADで図面描きました。 知合いの板金屋さんに作成する暇があるかどうか問い合わせ中… Pro/DESKTOP のデザイン画面でザグリ加工を入れるのってどうやるんだろう… まぁ、図面に書き込めばいいんですけど。 Pro/DESKTOP の無料版って配布終了しちゃったのね…
| 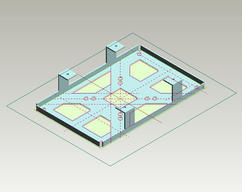 CPUフレーム最終版 70mm×110mm×20mm
2004/01/11
|
★ X-19 CPUフレーム(その2)
| これまで、切り欠きの部分をネジ止めして固定する案で設計してきたけど、この案は先送り。 箱型の入れ物に発泡スチロールを詰めて、そこに閉じ込めることにします。 動かしながらCPUボードを色々触ることがあるかも… と思っているのだけど、それは諦めってことで。
★ X-19 CPUフレーム
| CPUフレームの設計が全然進んでない… 「もうプラケースのままで出場しようかな…」と思って、よく見てみたら ボディとの取付穴あたりからヒビが… うーん… CPUボードに取り付け穴が全くないのが問題なんだよね… (基板のへりに 2.6mmφの切り欠きがあるだけ) これ ( L-Card+ ) を使ってる人って、どうやって固定してるんだろう… うう… もう今からじゃ板金まにあわないかなぁ…
2004/01/05
|
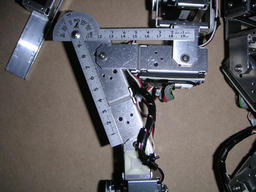
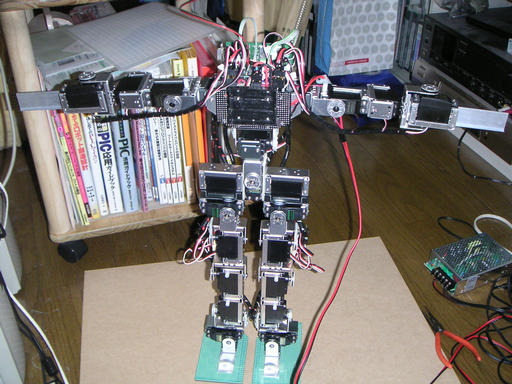
★ X-25 残作業リスト
|
| の、残り25日… 現時点での残作業(優先度順)
一年前から全然残作業が減ってない…(むしろ増えてるような…)
|  現状のゴーレムくん 横にあるのは30cm定規  NiMHの容量測定中
2004/01/01
|
★ X-29 あけましておめでとうございます
|
| 実家のネット環境の問題で更新が遅れてしまいました。 今年こそはリングで暴れさせたいと考えておりますので、みなさまよろしくお願いいたします。 …と言いつつ、年末年始の9日間なにも進捗無し…
|  立石公園(横須賀市秋谷)にて撮影 | |||||||||||||






{kind=link}
{kind=link}
2021年:
1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年