≥´»Ø∆¸ªÔ(2004 3Q)
2021«Ø:
1Q
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø
| 2004/09/28 X-38 | |
|
°˙ ∫£∆¸§Œ°÷•¨•§•¢§ŒÃÎÿ§±°◊
9∑Ó26∆¸§Œ∆¸µ≠§ÀΩÒ§§§ø°÷•¨•§•¢§ŒÃÎÿ§± •Ì•Ð•√•»§œ•—°º•»• °º º¬Õ—∑ø•Ì•Ð•√•»≥´»Ø§Àƒ©§ý°◊ œø≤˧Ú∏´§∆§Î§Œ§«°¢§Þ§¿≈”√ʧ¿§±§…°ƒª◊§√§∆§ø§Ë§Í§‚Ãëڧ´§√§ø§«§π°£ (§‰§√§—§Í§Þ§∏§´§Î°˘•Þ•Í•™•Õ•√•»§Œ∆¸µ≠§À§‚∫Чª§∆§™§±§–Œ…§´§√§ø§´§ °ƒ) •Ï•π•≠•Â°º•Ì•Ð•√•»§œ°¢RoboCup•Ï•π•≠•Â°º§Œœ√§«°¢ºÁÃÚ§œ≈≈ƒÃ¬Á§Œ•Ì•Ð•√•»§«§∑§ø°£ ≤∆§À∏´≥ÿ§Àπ‘§√§ø∏¶µÊºº§¿§√§ø§Œ§«°¢§Ω§Œ§»§≠§À§™≤Ò§§§∑§ø¿Ë¿∏§¨Ω–§∆§§§∆§¡§Á§√§»≥⁄§∑§´§√§ø§«§π°£ ≈≈ƒÃ¬Á§Œ•Ì•Ð§œ∑Ëæ°§Þ§«§§§√§ø§‚§Œ§Œ°¢œ¢¬≥§∑§∆≈æ≈ð§∑§∆§∑§Þ§√§∆•ð•§•Û•»•º•Ì§«…ȧ±§∆§∑§Þ§√§ø§Œ§«§π§±§…°£ √Þ«»¬Á≥ÿ§Œ•µ•§•–°º•¿•§•Û§«∫Ó§√§∆§§§ÎHAL( ‚π‘ªŸ±Á•Ì•Ð•√•»)°£ ∂⁄∆˘§ÿ§Œ≈≈µ§øÆπʧÚ∆…§þºË§√§∆•‚°º•ø°º§Ú¿©∏ʧ∑§∆§§§Î§Œ§œ√Œ§√§∆§§§ø§Œ§«§π§¨°¢∫£≤Û§œ°¢¿µæÔ§ ¬≠§ÿ§Œ≈≈µ§øÆπʧÚ∏µ§À°¢À„·„§∑§∆§§§Î¬¶§Œ¬≠§Œ•‚°º•ø°º§Ú¿©∏ʧ∑§Ë§¶§»§∑§∆§§§Þ§∑§ø°£ »÷¡»√ʧ«§œ°¢Œ©æ§ͧŒ ‰Ωı§œ§¶§Þ§Ø§§§Ø§‚§Œ§Œ°¢ ‚π‘§œ§¡§Á§√§»ø…§´§√§øÕÕª“°£ §«§‚°¢ ‚π‘§Œ•∆•Û•ð§»§´§ÚπÕ§®§Î§»°¢∑˧∑§∆ÃµÕ˝§«§œÃµ§µ§Ω§¶§ µ§§¨§∑§Þ§π°£∫£∏§À¥¸¬‘§∑§ø§§§»§≥§Ì§«§π°£ (ø©ªˆªŸ±Á•Ì•Ð•√•»§Œ ¨§œ§¢§»§«ƒ…µ≠§π§Î§´§‚) °˘[•≥•·•Û•»] | |
| 2004/09/27 X-39 | |
|
°˙ •µ°º•Ð•≥•Û•»•Ì°º•È(§Ω§Œ2)
Jin§µ§Û§Œ•µ°º•Ð•≥•Û•»•Ì°º•È§√§∆°ƒ °÷•◊•Ì•ð§¨∑“§≤§È§Ï§Î°◊§√§∆§≥§»§œ°¢√±¬Œ§«•µ°º•Ð•≥•Û•»•Ì°º•Î§»•‚°º•∑•Á•Û•≥•Û•»•Ì°º•Î§ŒŒæ ˝§¨§«§≠§Î•™°º•Î•§•Û•Ô•Û§ §Œ§´§ °ƒ PIC§Œ3«Ð§ŒΩËÕ˝¬Æ≈Ÿ§«°¢•’•È•√•∑•ÂROM§¨128Kbyte§‚§¢§Î§´§È§Ω§Ï§Ø§È§§§«§≠§Î§´§ °ƒ (PIC§œ4•Ø•Ì•√•Ø§«1•µ•§•Ø•Î§«§π) §¶°º§Û°ƒ •µ°º•Ð•≥•Û•»•Ì°º•Î§»•ª•Û•µ°ºΩËÕ˝§∑§´§«§≠§ §§•¥°º•Ï•ý§Ø§Û§Œ•≥•Û•»•Ì°º•È§»»Ê§Ÿ§¡§„º∫ŒÈ§«§∑§ø°£ ATmega128Õþ§∑§§§´§‚°ƒ --- ª≤πÕ°ß BTC068 ATmega128•Þ•§•≥•Û•Ð°º•… (•Ÿ•π•»•∆•Ø•Œ•Ì•∏°º) °˘[•≥•·•Û•»] | |
|
°˙ •µ°º•Ð•≥•Û•»•Ì°º•È
∫£∆¸§À§ §√§∆JinSato§µ§Û§¨24CH•µ°º•Ð•≥•Û•»•Ì°º•È§Ú∏¯≥´§∑§∆§§§Î§Œ§Àµ§§≈§≠§Þ§∑§ø°£ (≥´»Ø∆¸ªÔ°ß2004/09/25) •Þ•§•≥•Û§œ ATmega128°¢°¢24Ch§Œ•µ°º•Ð•≥•Û•»•Ì°º•Î°¢Œ¢ÃçÀ2D§Œ≤√¬Æ≈Ÿ•ª•Û•µ°º§»•™•⁄•¢•Û•◊°£ §µ§È§À°¢GPIO§À•∏•„•§•Ì§‰•◊•Ì•ð§¨∑“§¨§√§∆°¢KO•Ï•√•…•–°º•∏•Á•Û§Œ•ð•∏•∑•Á•Û∆…§þºË§Í§‚≤ƒ«Ω°£ §§§§§ §°°ƒ °ƒ§√§∆°¢•¥°º•Ï•ý§Ø§ÛÕ—•µ°º•Ð•≥•Û•»•Ì°º•È§¨ÃЪÿ§π•π•⁄•√•Ø§Ω§Œ§‚§Œ§∏§„§Û°£ ¥Ëƒ•§√§∆≥´»Øø §·§ §§§»°™ (∫«∂·∆±§∏§≥§»§–§´§Í∏¿§√§∆§Îµ§§¨°ƒ) ÕËΩµ§À§ §Ï§–≥´»Øª˛¥÷§¨ºË§Ï§Î§Ë§¶§À§ §Î°ƒ§œ§∫°£ §¡§ §þ§À°¢•¥°º•Ï•ý§Ø§Û§Œ•µ°º•Ð•≥•Û•»•Ì°º•È§œ PIC16F877°£ °˘[•≥•·•Û•»] | |
| 2004/09/24 X-42 | |
|
°˙ •Í•À•¢•¢•Ø•¡•Â•®°º•ø
§’§»°¢µ§§À§ §√§∆∏°∫˜§∑§∆§þ§ø°ƒ (∆®»Ú°© Google∏°∫˜°÷•Í•À•¢•¢•Ø•¡•Â•®°º•ø æÆ∑ø°◊ æÆ∑ø•Ì•Ð•√•»§Àª»§®§Ω§¶§ •µ•§•∫§Œ§√§∆§¢§Û§Þ§Íõ§§§Œ§Õ°ƒ ª»§®§Ω§¶§Àª◊§®§ø§Œ§œ
§Ø§È§§ °ƒΩ–Œœ§»Ω≈§µ§ÚπÕ§®§ø§È°¢•È•∏•≥•Û•µ°º•Ð§»¬Á∫π§ §§§´°ƒ •È•∏•≥•Û•µ°º•Ð§Œ•Ì•√•…§À•Í•À•¢•ª•Û•µ…’§±§Î ˝§¨§§§§§Œ§´§ °£ √Õ√ §Ô§´§È§ §§§∑§Õ°£ •ª•§•≥°º•®•◊•Ω•Û§Œ∂ı»Ù§÷•Þ•§•Ø•Ì•Ì•Ð•√•»§√§∆°¢Ω≈ø¥∞Ð∆∞§œ•Í•À•¢•¢•Ø•¡•Â•®°º•ø§¿§√§ø§Û§«§π§Õ°£ ª≤πÕ°ß infogogo.com •À•Â°º•»•Û(√±∞Ã) •À•Â°º•»•Û° Newton°À§œ°¢Œœ§Œ¬Á§≠§µ§Ú§¢§È§Ô§ππÒ∫ð√±∞Ã∑œ(SI)§Œ√±∞ð£µ≠πʧœN°£1904«Ø§À•Ì•–°º•»•Ω•Û§À§Ë§ÍƒÛæߧµ§Ï°¢•¢•§•∂•√•Ø°¶•À•Â°º•»•Û§ŒÃæ§À§¡§ §ý°£1960«Ø§ÀπÒ∫ð√±∞Ã∑œ§Œ√±∞继 §Î°£ °˘[•≥•·•Û•»] | |
|
°˙ (URL•·•‚) ∆Û¬≠ ‚π‘•Ì•Ð•√•»¥ÿœ¢∆√µˆ∏°∫˜∑Î≤Ã
ONO§Œ≈≈«æ …ø∑ π …‘ƒÍ¥¸∆¸µ≠(2004/09/23)∑–Õ≥ ∆Û¬≠ ‚π‘•Ì•Ð•√•»•◊•Ì•∏•ß•Ø•»ARR§´§È Robot PAT List ∞ ≤º≥∆º“ çÀ∆√µˆ ∏ΩÒ∏°∫˜§« ‚π‘•Ì•Ð•√•»§Ú∏°∫˜§∑§ø∑Î≤竧¢§Î §’§ý§ý°ƒª≤πÕ§À§ §Î(+1) §∑§´§∑°ƒ§Þ§·§À∆√µˆøΩ¿¡§∑§∆§Î§Û§«§π§Õ°ƒ ª‰§¨æÆ∑ø§Œ•Ì•Ð•√•»§Ú«‰§ÍΩ–§∑§ø§È∆√µˆ§ÚΩ‚§À•È•§•ª•Û•∑Õ◊µ·§»§´Õ˧Χ´§ °ƒ (§Ω§Û§ ∆¸§œÕ˧ §§§√§∆) °˘[•≥•·•Û•»] | |
| 2004/09/18 X-45 | |
|
°˙ KRS 2346 ICS KAMINARI M.Version
SuperMachine§«°¢KRS 2346 ICS KAMINARI M.Version §¨∏¯≥´§µ§Ï§∆§Î°£(2004.9.20§Œ∆¸µ≠) §¶§¢§¢°ƒ§‰§√§—§Íµ»¬º§µ§Û§Œ≥´»Ø¬Æ≈Ÿ§œ¡·§§°ƒ πı§§≈€§Ú∆≥∆˛§∑§∆§‰§Ì§¶§»ª◊§√§∆§§§ø§≥§»§¨§Ω§≥§À°ƒ ° ª‰§œΩ–Œœº¥¬¶§Œº™§Ú¿⁄§ÍÕÓ§»§∑§∆•¢°º•ý§Ú•≥•Û•—•Ø•»§À§∑§ø§§§Œ§¿§±§…°À §¶§¶§¶°ƒ§‚§ø§‚§ø§∑§∆§ §§§«°¢§µ§√§µ§»≥´»Ø§Úø §·§ §≠§„°£ §Þ§∫°÷≥Œº¬§À∞Ï ‚§Ú∆ߧþΩ–§ª§Î§Ë§¶§À§π§Î°◊§≥§»§´§È°ƒ °˘[•≥•·•Û•»] | |
| 2004/09/18 X-48 | |
|
°˙ ∆Û¬≠ ‚π‘•Ì•Ð•√•»•≠•√•»ø∑¿Ω… http://www.speecys.com/
SuperMachine∑–Õ≥ Speecys °ƒ§π§¥§§°ƒ Ω–Œœº¥§Ú»ø≈槵§ª§øƒæ∏Úº¥πΩ¿Æ°¢RS485¡– ˝∏˛ƒÃøƵ°«Ω°¢ UNIX∑œOS(NetBSD)§«§Œ¿©∏Ê°¢Ãµ¿˛LAN§«§ŒƒÃøÆ°ƒ •¥°º•Ï•ý§Ø§Û§Œº°¿§¬Âµ°§«§‰§Í§ø§´§√§ø§≥§»§¨¿Ω… §«Ω–§¡§„§¶§Œ§´°ƒ §…§Û§…§Ûº˛§Í§´§È√Ÿ§Ï§∆§§§√§∆§∑§Þ§¶°£ •»•√•◊•⁄°º•∏§À 10∑Ó2°¡4∆¸§Œ•◊•È•‚•«•Î•È•∏•≥•Û•∑•Á°º§«≥´»Ø»Ø…ΩÕΩƒÍ §»§¢§Î§´§È°¢•µ°º•Ð≥´»Ø§œ¡–Õ’≈≈ª“§ §Œ§´§ ≤¡≥ §À§Ë§√§∆§œ•‚•¡•Ÿ°º•∑•Á•Û§¨µÞπþ≤º§π§ÎÕΩ¥∂°£ §Þ§ø°¢ºÍ§¨∆œ§≠§Ω§¶§«∆œ§´§ §§≤¡≥ § §Û§¿§Ì§¶§ °ƒ °˘[•≥•·•Û•»] | |
| 2004/09/10 X-56 | |
|
°˙ ¬Ë£∂≤ÛDVD≈˛√Â
§»§…§≠§Þ§∑§ø°£ §§§ƒ§‚§¢§Í§¨§»§¶§¥§∂§§§Þ§π°£ °‰ ª∞∑Ó≈∆§µ§Þ ∫£∑Ó§œ…Ω§Œª≈ªˆ§¨•–•ø•–•ø§»Àª§∑§§§Œ§«°¢9/20§´§È§Œ≤∆µŸ§þ§À§ §È§ §§§»¥—§È§Ï§ §Ω§¶§«§π°£ ≥´»Ø§‚ªþ§Þ§√§¡§„§√§∆§∆•π•»•Ï•πŒØ§Íµ§Ã£°£ °˘[•≥•·•Û•»] | |
| 2004/09/05 X-61 | |
|
°˙ ∆Ûº¥ ‚π‘°ø∆Ûº¥Õ˝œ¿
»˛Õ∆ª’§µ§Û§À•Ì•Ð•√•»§Œ ‚π‘§Œœ√§Ú§∑§∆§ø§È°ƒ(»˛Õ∆±°§«§Ω§Û§ œ√¬ÍΩ–§π§ §√°™) °÷§¢§°°¢∆Ûº¥ ‚𑧠§Û§«§π§Õ°◊ §√§∆∏¿§Ô§Ï§Þ§∑§ø°£ ∆Ûº¥ ‚π‘°©°©°©§ §Û§¿§Ì§¶§Ω§Ï§œ°ƒ °÷§Ω§Ï§√§∆≤ø§«§π§´°©°◊§» 𧧧ø§È •π•ð°º•ƒª®ªÔ(Number§¿§√§ø§´§ °©)§À∫Ч√§∆§§§ø§È§∑§§°£ •π•ð°º•ƒ¡™ºÍ§œ∆Ûº¥ ‚𑧫•‚•«•Î§µ§Û§Œ ‚§≠ ˝§¨∞Ϻ¥ ‚π‘°ƒ §Þ§¢§ §Û§»§ §Ø»Ω§Î§Û§¿§±§…µ§§À§ §√§ø§Œ§« Google §∑§∆§þ§ø°£ °÷∆Ûº¥Õ˝œ¿°◊§À§Œ§√§»§√§ø ‚𑧨°÷∆Ûº¥ ‚π‘°◊§ §Œ§´§ °ƒ
∂ıºÍ§»§´Ω¿∆ª§¨§≥§Û§ ‚§≠ ˝§´§‚§Õ§ß °˘[•≥•·•Û•»] | |
| 2004/09/01 X-65 | |
|
°˙ •¢•§°¢•Ì•Ð•√•»ªÓºÃ≤Ò
§Þ§°°ƒÃëڧ´§√§ø°ƒ§´§ °ƒ ∏∂∫Ó§√§∆§…§Û§ œ√§ §Û§¿§Ì§¶°ƒ (º¬§œ§Þ§¿∆…§Û§«§ §§) •¢•Ø•∑•Á•Û§¨•·•§•Û§À§ §√§∆§∑§Þ§¶§Œ§œ°¢∫£§»§ §√§∆§œ∏≈≈µ≈™§ •∆°º•Þ§¿§´§È°© --- ≤Òæϧ«§œ√ʬº«ÓªŒ§ŒŒŸ§Œ¿ §À§ §√§ø§Œ§«øß°π§™œ√§∑§Úª«§§§Þ§∑§ø°£ •¥°º•Ï•ý§Ø§Û§À§‚»Îé º¥Ô§Ú≈Î∫Ч∑§Ë§¶§´§ °ƒ §¢§»°¢°÷Œ…§Ø∏´§´§±§ÎøÕ§¿§ °ƒ°◊§»ª◊§√§∆§§§ø ˝§¨•§•´•Ì•π§µ§Û§¿§»»Ωÿ°£ •´•Û•’•°•Ï•Û•π§Þ§«§Œ•‚•¡•Ÿ°º•∑•Á•Û§Ú 𧃧Œ§ÀŒ…§§µ°≤Ò§«§∑§ø°£ °˘[•≥•·•Û•»] |
|
| 2004/08/30 X-67 | |
|
°˙ °÷ROBO-ONE Special in ≤÷§‰§∑§≠°◊§œ 11/6,7 ≥´∫≈§À —ππ§À§ §Í§Þ§∑§ø°£ §≥§Ï§«£±Ωµ¥÷≤∆µŸ§þ§ÚºË§√§∆Œππ‘§À§§§√§∆§‚¬ÁæÊ…◊§´§ °ƒ §Ω§Ì§Ω§Ì∫Ó∂»∫∆≥´§∑§ §≠§„§Õ°£ °˘[•≥•·•Û•»] | |
| 2004/08/27 X-63 | |
|
°˙ ROBO-ONE•¢•Û•∆• …‘ƒ¥
§ §Û§´°ƒ geocities.jp §Œ Last-Modified •ÿ•√•¿§¨§™§´§∑§§°£ ∞Ï∫Ú∆¸§Þ§«§œ°¢§¡§„§Û§»•’•°•§•Î(index.html§»§´)§Œππø∑∆¸…’§Ú ÷§∑§∆§§§ø§Œ§À°¢ ∫Ú∆¸§´§ÈæÔ§ÀºË∆¿(HTTP§ŒGET/HEAD)§∑§øª˛¥÷§À§ §√§¡§„§¶°£ ª≈ ˝§¨§ §§§Œ§«°¢•⁄°º•∏§Œ√Êø»§¨ —§Ô§√§ø§´§…§¶§´§Ú•¡•ß•√•Ø§π§Î ˝À°§À¿⁄¬ÿ§®°£ •’•°•§•Î§Œππø∑∆¸…’§Ú ÷§ª§ §§§Œ§ §È Last-Modified •ÿ•√•¿…’§±§ §§§«Õþ§∑§§§Û§¿§±§…°ƒ ±øÕ—¬¶§‚Õ¯Õ—º‘¬¶§‚§Ω§Û§ §Œµ§§À§∑§∆§ §§§Û§¿§Ì§¶§ §°°ƒ §Þ§°°¢∏µ§Œæı¬÷§À÷§√§ø§¿§±§»§§§®§–§Ω§¶§ §Û§¿§±§…°£ --- ª≤πÕ°ßROBO-ONE•¢•Û•∆• °˘[•≥•·•Û•»] | |
| 2004/08/25 X-65 | |
|
°˙ Treva
§ §Û§´°ƒ ∫«∂·Treva§Œ•‰•’•™•Ø§«§Œ≥´ªœ≤¡≥ §¨æ§¨§√§∆§Î°£ Ω–… øÙ§¨∏∫§√§∆§≠§ø§»§≥§Ì§ÿ•Ì•Ð¿Ω∫Óº‘§¨«„§§§œ§∏§·§∆°¢¡Íæϧ¨æ§¨§√§¡§„§√§ø§´§ °ƒ §‚§√§»¡·§Ø«„§®§–Œ…§´§√§ø°£ °˘[•≥•·•Û•»] | |
| 2004/08/23 X-67 | |
|
°˙ °÷•¢•§°§•Ì•Ð•√•»°◊¿Ëπ‘ªÓºÃ≤ÒøΩ§∑π˛§þ§Þ§∑§ø
∑Î∂…§§§ƒ§‚ƒÃ§Í∞ÏøÕ§ §Œ§«°¢≤Òæϧ«∏´§´§±§ø§È¡ÍºÍ§Ú§∑§∆§¢§≤§∆§Ø§¿§µ§§°£(≤ø °˘[•≥•·•Û•»] | |
|
°˙ (URL•·•‚) Linux §«•œ°º•…•¶•ß•¢(RT-Linux§Úª»§Ô§ §§º¬ª˛¥÷ΩËÕ˝§Œ ˝À°)
°÷•Ì•Ð•√•»π©≥ÿπ÷µ¡æ Û°◊§»∆±§∏ •Ì•Ð•√•»≥´»Øπ©≥ÿ(≈ÏÀÃ≥ÿ±°¬Á≥ÿ µ°≥£¡œ¿Æπ©≥ÿ≤ ∑ß√´∏¶µÊºº§Œ•⁄°º•∏)§´§È RT-Linux§Úª»§Ô§∫§Àº¬ª˛¥÷ΩËÕ˝§Ú𑧶§ø§·§Œ•∆•Ø•À•√•Ø§Œæ“≤ º˛¥¸ΩËÕ˝§Ú ‰Ωı§π§Î•«•–•§•π•…•È•§•–§Ú∫Ó§√§∆°¢•Ê°º•∂•◊•Ì•ª•π§»œ¢∆∞§µ§ª§Î ˝À°§»§´°¢ •Ê°º•∂•◊•Ì•ª•π§´§È§Œ•œ°º•…•¶•ß•¢¿©∏ʧ»§´°¢ •«•–•§•π•…•È•§•–§Œ∫Ó§Í ˝§»§´øß°π°£ §»§Í§¢§®§∫°¢PIC¬¶§´§È∆±¥¸•·•√•ª°º•∏§Ú¡˜§√§∆•Í•¢•Î•ø•§•ýΩËÕ˝§‚§…§≠§À§∑§Ë§¶§´§»°ƒ (10msec ¥÷≥÷§«°¢∏Ì∫π 1msec§Ø§È§§§¢§√§∆§‚¬ÁæÊ…◊§Ω§¶§¿§´§È) °÷µ’±ø∆∞≥ÿ°◊§Ë§Í§‚§≥§√§¡§¨¿Ë§¿§Õ°£ °˘[•≥•·•Û•»] | |
|
°˙ (URL•·•‚) •Ì•Ð•√•»π©≥ÿπ÷µ¡æ Û
∆ÛΩµ¥÷§Ø§È§§¡∞§À°÷±ø∆∞≥ÿ DHÀ°°◊§«Google∏°∫˜§∑§∆§∆∏´…’§±§Þ§∑§ø°£ •Ì•Ð•√•»≥´»Øπ©≥ÿ(≈ÏÀÃ≥ÿ±°¬Á≥ÿ µ°≥£¡œ¿Æπ©≥ÿ≤ ∑ß√´∏¶µÊºº§Œ•⁄°º•∏)§´§È DHÀ°§¨§…§¶§§§¶≥µ«∞§ §Œ§´§œ§ §Û§»§ §Ø»Ω§Í§Þ§∑§ø°£ ≤Û≈æ°¶∞Ð∆∞π‘ŒÛ§Úª»§√§∆∫¬…∏ —¥π§Ú∑´§Í ÷§π§Û§«§π§Õ°£ §≥§Ï§«µ’±ø∆∞≥ÿ§Ú•Í•¢•Î•ø•§•ý∑◊ªª§π§Î•◊•Ì•∞•È•ý§Ú∫ӧϧΧ´§ °ƒ §¢§»°¢∆±§∏§»§≥§Ì§«∏´…’§±§ø§Œ§¨ §≥§Ï§Úª»§√§∆PIC§Œ•◊•Ì•∞•È•ý§Œ•…•≠•Â•·•Û•»§Ú∫ӧ̧¶§´§»°£ --- ∂‚¬Ùπ©∂»¬Á≥ÿ ≥ÿΩ¨ªŸ±Á∑◊≤ËΩÒ§‚°¢ª≤πÕøÞΩÒ§¨∫Ч√§∆§§§∆Ωı§´§Í§Þ§π°£ °˘[•≥•·•Û•»] | |
| 2004/08/17 X-73 | |
|
°˙ (URL•·•‚) Linux§À•”•«•™•´•·•È(•¶•ß•÷•´•·•È)§Ú§ƒ§ §∞
Linux§À•”•«•™•´•·•È(•¶•ß•÷•´•·•È)§Ú§ƒ§ §∞ Linux§«ª»§®§ÎUSB•´•·•È§Œ•Í•π•»§¨Ω–§∆§Î§Œ§«§≥§Ï§Ú CLIE §À•·•‚§√§∆§™§≥§√§»°£ §‚§¡§Ì§Û•¥°º•Ï•ý§Ø§Û§ŒªÎ≥–•◊•Ì•∞•È•ý§Ú≥´»Ø§π§Î§ø§·§«§π°£ •¥°º•Ï•ý§Ø§Û§À§œ Treva §Ú∫Чª§Î§»ª◊§¶§±§…°£ °˘[•≥•·•Û•»] | |
| 2004/08/15 X-75 | |
|
°˙ ∫≤§Œ∂´§”(°©)
Project Autowalker§À Dr. GIY§µ§Û§Œ°÷∫≤§Œ∂´§”°◊§¨°ƒ •¥°º•Ï•ý§Ø§Û§‚2«Ø¡∞§Œ•«•”•Â°º∞ Õ˧∫§√§»∆±§∏•µ°º•Ð§«§π°£ (§¢°¢§≥§ §§§¿∏‘¥ÿ¿·•‘•√•¡º¥§Ú Red §À∏Ú¥π§∑§ø§√§±) ¬Á≤Ò§Œª˛§À¬≠ºÛ•µ°º•Ð§Œ∆∞§≠§¨Ω¬§Ø§ §√§ø§≥§»§ÚKO§ŒøÕ§À¡Í√ç∑§ø§È°¢ °÷•Æ•‰§¨ÀýÃ◊§∑§∆•Ø•∫§¨ŒØ§√§∆§Î§Œ§´§‚°◊§√§∆∏¿§Ô§Ï§ø§∑ ª‰§‚ø∑§∑§§•µ°º•ÐÕþ§∑§§§Ë°º°º°º §ª§·§∆°¢ºÍª˝§¡§Œ2144§Ú Red Version §Œ¥»ƒ§À∏Ú¥π§∑§∆Õþ§∑§§(æ– §Ω§¶§§§®§–≤ı§Ï§ø•µ°º•Ð§ÚKO§À¡˜§Î§»Ω§Õ˝∏´¿—§Í§∑§∆§‚§È§®§Î§Û§¿§√§ø°£ ∆∞§≠§¨Ω¬§§§Œ§‚∞ÏΩÔ§À¡˜§Ì§¶§´§ °£ °ƒ§√§∆°¢≤ø§Ë§Í§‚Õþ§∑§§§Œ§œ°÷£≥ª˛¥÷∞ æ•–•√•∆•Í°º∆∞∫Ó§«§≠§Î1kg∞ ≤º§Œ•Œ°º•»PC°◊§´§‚ --- °÷•™•Î•∆•¨•œ•Û•Þ°ºþ⁄Œˆ°◊±«¡¸§¢§Í§¨§»§¶§¥§∂§§§Þ§∑§ø°£ °‰ Dr. GIY§µ§Þ º°≤Û§œ ÷§∑µª§»§»§‚§ÀÕΩ¡™∆Õ«À§∑§ø§§§»ª◊§§§Þ§π°£(æ– °˘[•≥•·•Û•»] | |
| 2004/08/14 X-76 | |
|
°˙ •¥°º•Ï•ý§Ø§Û∏Ê»‰œ™ÃÐ
∫Ú»’§Œø©ªˆ≤Ò§À§œ•¥°º•Ï•ý§Ø§Û§Úœ¢§Ï§∆π‘§≠§Þ§∑§ø°£ ROBO-ONE≤ÒæÏ∞ ≥∞§«øÕ§À∏´§ª§Î§Œ§œ2≤ÛÃЧ´§ °ƒ (1≤ÛÃЧœ Night for Java Technology §Œª˛§ÀÕß√£§À∏´§ª§ø) ∫«Ωȧœ∂˛ø≠§¿§±§Œ§ƒ§‚§Í§¿§√§ø§Œ§¿§±§…°¢ ∂Ωã§Úª˝§√§∆§‚§È§®§ø§þ§ø§§§ §Œ§«°¢Œ˝Ω¨√ʧŒ°÷∫∏¬≠∞Ï ‚¡∞§ÿ°◊§Ú»‰œ™°£ ¿Æ∏˘§π§Î§Œ§œ£≥≤Û§À£±≤ۧاȧ§§ §Û§¿§±§…§Õ°£ ≥⁄§∑§Û§«§§§ø§¿§±§ø§Ë§¶§«Œ…§´§√§ø§«§π°£ °ƒ§«§‚°÷∫ӧͧø§§°◊§√§∆§§§¶øÕ§œ¡˝§®§ §§°ƒ √ŒπÁ§§§œ•Ω•’•»≤∞§µ§Û§¨¬ø§§§´§Èª≈ ˝§ §§§´§ °£ øß°πº¡Ã‰§µ§Ï§ø§»§≠§Œ§ø§·§À•π•⁄•√•Ø§»§´πΩ¿Æ§»§´§Ú¿∞Õ˝§∑§∆WEB§À∫Чª§ §≠§„§Õ°£ °˘[•≥•·•Û•»] | |
| 2004/08/10 | |
|
°˙ X-80 X-DAY∫∆¿þƒÍ
º°§Œ∂Ë¿⁄§Í§œ 10/30,31 §Œ°÷¬Ë2≤ÛROBO-ONE•π•⁄•∑•„•Î in ≤÷§‰§∑§≠°◊ ºı…’ª˛¥÷§Þ§« 80∆¸§»13ª˛¥÷ ∫«ƒ„§«§‚°÷ ‚π‘°◊§»°÷µØ§≠槨§Í°◊§Ú¥∞¿Æ§µ§ª§∆°÷ROBO-ONE•¿•√•∑•Â°◊§À•®•Û•»•Í°º§∑§ø§§§«§π°£ ¥÷§ÀπÁ§¶§Ë§¶§ §È TREVA §Úª»§√§ø≤Ë¡¸«ßº±§‚°ƒ °ƒ§»∏¿§§§ƒ§ƒ ∞ÏΩµ¥÷§€§…≥´»Ø§Ú§™µŸ§þ§∑§∆•Í•’•Ï•√•∑•Â§∑§Þ§π°£ ∫£≤Û§œ§´§ §Í»Ë§Ï§Þ§∑§ø°£ --- ≥´»Ø§™µŸ§þ°ƒ§»∏¿§§§ƒ§ƒ°¢°÷§Þ§∏§´§Î°˘•Þ•Í•™•Õ•√•»°◊§Œ•≥•Û•∆•Û•ƒ(PIC§Œ•Ω°º•π•≥°º•…§»§´)§Ú¿∞»˜§∑§ø§Í°¢°÷ROBO-ONE•¢•Û•∆• °◊§Œ•·•Û•∆• •Û•π§∑§ø§Í§∑§Ω§¶°ƒ(æ– •¢•Û•∆• §Àππø∑…Ù ¨…Ωº®µ°«Ω§»§´§‚ƒ…≤√§∑§ø§§§Õ°£ (hatena§Œ•¢•Û•∆• §À…’§§§∆§Î§Ë§¶§ •¢•Ï) °˘[•≥•·•Û•»] | |
| 2004/08/09 | |
|
°˙ ROBO-ONE ¬Ë£∂≤Û ¥∂¡€ (§Ω§Œ¬æ)
1) ≥⁄§∑§þ§À§∑§∆§§§ø§Œ§À∏´§È§Ï§ §´§√§ø§‚§Œ °¶•·•ø§¡§„§Û§Œµ’Œ©§¡•¢•ø•√•Ø °¶…‘√Œ≤–§Œ•™•Î•∆•¨•œ•Û•Þ°ºþ⁄Œˆ §™∆ÛøÕ§ŒWEB•⁄°º•∏§Ú∏´§∆§þ§Î§»°¢Àпԡ∞§À…‘ƒ¥§À§ §√§∆§§§ø§»§Œ§≥§»°£ º°§Œ¿Ô§§§«§œ§µ§È§À•—•Ô°º•¢•√•◊§∑§øµª§À¥¸¬‘§∑§∆§§§Þ§π°£ °÷•™•Î•∆•¨•œ•Û•Þ°º§«A-Do£∂πʵ°§‰CHROINO§Œ∆¨§¨•´•¡≥‰§È§Ï§Î§Œ§Ú≥⁄§∑§þ§À§∑§∆§§§Þ§∑§ø°◊ § §Û§∆Ωҧا»øÕ≥ µø§Ô§Ï§Ω§¶§«§π§¨ªˆº¬§«§π°£(§©§£ 2) ª◊§Ô§∫∏´§ƒ§±§∆§∑§Þ§√§∆∆¨§Ú ˙§®§ø§‚§Œ °¶•™•Í•∏• •Î•Þ•§•Û•…§µ§Û§Œπı§§≈€ ÕΩ¡™§Œ∆¸§À𵧮ºº§«•«•‚§Ú§∑§∆§§§Þ§∑§ø°£ ª◊§√§ø§Ë§Í§‚æƧµ§§§«§π§Õ§ß°ƒ §∑§´§‚°¢∫ýŒ¡§Ú∫Чª§Î¬Ê§Ú§¶§Þ§Ø≤√π©§π§Ï§–¿⁄∫ÔÃ˝§Ú√˘§·§∆§™§±§Ω§¶§ ¥∂§∏°£ §µ§È§À«„§§§ø§§µ§ª˝§¡§¨π‚§Þ§√§∆§∑§Þ§§§Þ§∑§ø°£ …Ù≤∞∞Ï«’§ŒÀЧ»…˛§Ú•Ï•Û•ø•Î•π•⁄°º•π§Àƒ…§§Ω–§∑§∆∆≥∆˛§π§Ÿ§≠§«§∑§Á§¶§´°ƒ §¢§»°¢°÷¥∞¿Æ… §Úπÿ∆˛§π§Î§≥§»§œ§«§≠§ §§§Û§«§π§´°©°◊§»º¡Ã‰§∑§ø§È°¢ °÷ª‰∞ÏøÕ§Œ≤Òº“§ §Œ§«¡»§þŒ©§∆§∆§Î§»¬æ§Œª≈ªˆ§¨ªþ§Þ§√§¡§„§¶§Û§«§π§Ë°◊ §»§Œ§≥§»°£ §Ω§¶§¿§√§ø§Œ§Õ°ƒ§™§ƒ§´§Ï§µ§Þ§«§π°£ --- ¬æ§À§‚𵧮ºº§«§ø§Ø§µ§Û§ŒøÕ§»øß°π§ œ√§¨§«§≠§∆°¢ª…∑„≈™§ £≤∆¸¥÷§«§∑§ø°£ ‚π‘ ˝À°§À§ƒ§§§∆•¢•…•–•§•π§∑§∆ƒ∫§§§ø ˝°π§¢§Í§¨§»§¶§¥§∂§§§Þ§π°£ ≈⁄ÕÀ∆¸§ŒÃΧÀ ‚…˝§Ú»æ ¨§À§∑§∆ªÓ§∑§ø§È°¢£≥≤Û§À£±≤ۧاȧ§∞Ï ‚§Ú∆ߧþΩ–§ª§Î§Ë§¶§À§ §Í§Þ§∑§ø°£ --- 2004/08/10 0:30 ƒ…µ≠ ∫£≤Û°¢§ƒ§§§ÀæÞ… §Ú§‚§È§®§Þ§∑§ø§√°™ °÷ÕΩ¡™ÕÓ§¡§∑§ø§þ§ §µ§Û§À•¢•§°¶•Ì•Ð•√•»§Œ£‘•∑•„•ƒ§Ú∫π§∑æ§≤§Þ§π°◊ °ƒ§√§∆°¢ª≤≤√æÞ§∏§„§Û°£ °˘[•≥•·•Û•»] |
 •¢•§°¶•Ì•Ð•√•»§Œ£‘•∑•„•ƒ «ÿ√ʧÀ§œ°÷•Ì•Ð•√•»ª∞∏∂¬ß°◊ |
|
°˙ ROBO-ONE ¬Ë£∂≤Û ¥∂¡€ (ÀÐ¿Ô ‘)
°ƒ§√§∆°¢∞Ï≤Û¿Ô§œø≤≤·§¥§∑§∆∏´§∆§ §§°ƒ (º°≤Û§≥§Ω§œÕΩ¡™¡∞∆¸§À§¡§„§Û§»øÁÃ≤§Ú§»§Ì§¶) ∏ƒ 猿ԧ§§À§ƒ§§§∆§œ°÷¥Ë∂˛≤¶πÒ•Õ•™°◊§ŒAugust 2004 •–•√•Ø• •Û•–°º§¨§™¡¶§· ∫£≤Û§ŒÀпԧ«∞Ï»÷∞ıæð§Àªƒ§√§ø§Œ§œ°¢¥⁄πÒ¿™§Œ°÷∞˙§≠≈ð§∑µª°◊ ¡ÍºÍ§À¿µ¬–§ª§∫»æø»§Œæı¬÷§«°¢¡ÍºÍ§Œ∏™§‰∆¨§Œ§¢§ø§Í§ÀºÍ¿Ë§Ú∞˙§√§´§±§∆°¢¡ÍºÍ§¨≈ð§Ï§‰§π§§ ˝∏˛§ÿ∞˙§√ƒ•§√§Î§Ë§¶§À∞Ð∆∞§∑§∆°¢¡ÍºÍ§Œ•–•È•Û•π§Ú ¯§∑§Þ§π°£ ¬≠ºÛ•µ°º•Ð§ÿ§‚§´§ §Í•¿•·°º•∏§ÚÕø§®§Ω§¶§ ¥∂§∏°£ §ø§Þ§Àº´ ¨§¨≈ð§Ï§∆§∑§Þ§¶§≥§»§¨§¢§√§ø§±§…°¢§¶§Þ§Ø§’§Û§–§√§∆¡ÍºÍ§¿§±§Ú≈ð§∑§∆§§§Þ§∑§ø°£ (§»§§§¶§´¡∞∏§Àµ”§Ú≥´§§§∆¬ŒΩ≈∞Ð∆∞§«¡ÍºÍ§Ú≈ð§∑§∆§§§Î§Œ§´§‚) ¡ÍºÍ§Ú∞˙§√§´§±§‰§π§§§Ë§¶§ÀºÍ¿Ë§Œ∑¡æı§‚π©…◊§∑§∆§§§Î§Ë§¶§«§∑§ø°£ (ºÃøø§¨Ãµ§Ø§∆¿‚ÿ§¨§Ô§´§Í§À§Ø§Ø§∆§π§þ§Þ§ª§Û) Dynamixel§Œ•—•Ô°º§Œ§ §ª§Îµª§ §Œ§´°¢§“§∂§Ú∂ §≤§øƒ„§§ª—¿™§«§Œ¿¢¬≠∞Ð∆∞(§≥§Ï§‚§π§¥§ØŒ…§´§√§ø)§Œ∏˙≤ç §Œ§´°¢§π§–§È§∑§§π∂∑‚§«§∑§ø°£ æÏπÁ§À§Ë§√§∆§œ°÷∞˙§≠≈ð§∑°◊§»§§§¶§Ë§Í§‚°÷æºÍ≈ͧ≤°◊§À∂·§§¥∂§∏§¨§¢§Í§Þ§∑§ø°£ ∫£∏°¢§‚§√§»¬ø∫ç ≈ͧ≤µª§¨§«§∆§≠§Ω§¶§«≥⁄§∑§þ§«§π°£ ∑Ëæ°¿Ô§«§œ∂¬Á•¡°º•ý§‚ª˜§ø§Ë§¶§ π∂∑‚§Ú§∑§∆§§§ø§±§…°¢≈ˆ∆¸•‚°º•∑•Á•Û§Ú∫Ó§√§ø§Œ§´§ °ƒ ¿µÃ猡ͺͧÀ≈ð§Ï§ƒ§ƒ»Ù§”π˛§ý°÷•’•È•§•§•Û•∞•Ð•«•£•¢•ø•√•Ø°◊(°©)§Ë§Í§‚∏´§∆§§§∆≥ π•§Ë§´§√§ø§«§π°£ §¢§»§œ°¢Õ•æ°§∑§ø∂¬Á•¡°º•ý§¨°÷Ω≈ŒÃµÈ•œ•§•—•Ô°º°◊œ©¿˛§ŒÃ‰¬Í≈¿§Ú≥¿¥÷∏´§ª§∆§Ø§Ï§ø§≥§»§´§ °£ •œ•§•—•Ô°º•µ°º•Ð§»∆∞Œœ∏ª§Œ•–•√•∆•Í°º§¨»Ø«Æ§À¬—§®§È§Ï§ §µ§Ω§¶°£ •È•¶•Û•…¥÷§Œ2 ¨¥÷§À£¥øÕ§¨§´§´§Í§«•µ°º•Ð§»•–•√•∆•Í°º§Ú∞Ï¿∏∑¸ÃøŒ‰§‰§∑§∆§Þ§∑§ø°£ ¿Ô§§§¨ƒπ∞˙§±§–°¢•µ°º•Ð§¨«Æ•¿•Ï§∑§∆∆∞§±§ §Ø§ §Î§´§‚°ƒ§»ª◊§√§ø§±§…°¢∫£≤Û§œ§Ω§¶§§§¶•∑•¡•Â•®°º•∑•Á•Û§À§œ§ §Í§Þ§ª§Û§«§∑§ø°£ ∂‚¡¨≈™§À§‚±øÕ—≈™§À§‚æÆøÕøÙ§Œ•¡°º•ý§À§œøøª˜§«§≠§ §µ§Ω§¶§«§π°£ º°≤Û§‚ºÁŒÆ§œ 2kg¬Ê§Œ•Ì•Ð•√•»§´§ °ƒ °÷∂‚¡¨≈™°◊§»§§§®§–°¢°÷∫£≤Ûª≤≤√§∑§∆§§§ø¥⁄πÒ¿™§œ§€§»§Û§…§¨Ωý•Ô°º•Ø•π°◊§»§§§¶œ√§Ú π§≠§Þ§∑§ø°£ °÷Ωý•Ô°º•Ø•π°◊§»§§§¶§Œ§¨°¢°÷∂‚¡¨≈™°¢ªÒ∫ý≈™§ ªŸ±Á§Úºı§±§∆§§§Î°◊§ §Œ§´°÷»Ø«‰¡∞§Œ¿Ω… §ÚÕ•¿Ëπÿ∆˛§«§≠§∆§§§Î°◊§ §Œ§´°÷µªΩ—≈™§ ªŸ±Á§Úºı§±§∆§§§Î°◊§ §Œ§´•Ï•Ÿ•Î§¨§œ§√§≠§Í»Ω§Í§Þ§ª§Û§¨°ƒ ( 𧧧øµ§§¨§π§Î§±§…À∫§Ï§Þ§∑§ø°ƒ°ß§©§§) §ø§¿°¢∆¸ÀЧ«∞Ï∏ƒ27,300±þ§‚§π§Î•µ°º•Ð§Ú20∏ƒ∞ æÂ≈Î∫Ч∑§ø•Ì•Ð•√•»§Ú¿Ω∫Ó§∑§∆§§§Î§≥§»§ÚπÕ§®§Î§»°¢°÷∂‚¡¨≈™§ ªŸ±Á§¨§¢§Î§Œ§´§ §°°ƒ°◊§»ª◊§√§ø§Í§‚§∑§Þ§π°£ ±Û¿¨Œπ»Ò§‚«œºØ§À§œ§ §Í§Þ§ª§Û§∑§Õ°ƒ°£ §ø§¿°¢•Ô°º•Ø•π§ §È•Ô°º•Ø•π§»∏¿§√§∆Õþ§∑§´§√§ø§´§‚°ƒ çÀ•¢•Þ•¡•Â•¢§Œ¬Á≤Ò§»§§§¶§Ô§±§«§œ§ §§§´§È°¢•Ô°º•Ø•π§«§‚•¢•Þ•¡•Â•¢§«§‚¥ÿ∑∏§ §§§Œ§«§∑§Á§¶§±§…°£ ø٫Ч‚§ŒªÒ∂‚Œœ§Ú∏´§ª§ƒ§±§È§Ï§Î§»•‚•¡•Ÿ°º•∑•Á•Û§À±∆∂¡§π§Î§Œ§«°£ --- § §…§»∂Ï∏¿§ÚƒË§∑§ø§Í§∑§Þ§∑§ø§¨°¢≤Û§ÚΩ≈§Õ§Î§¥§»§ÀŒ…§§¬Á≤Ò§À§ §√§∆§§§Î§»ª◊§§§Þ§π°£ ROBO-ONE∞—∞˜≤Ò§™§Ë§”¥ÿ∑∏º‘§Œ≥ßÕÕ§¥§Ø§Ì§¶§µ§Þ§«§∑§ø°£ °˘[•≥•·•Û•»] | |
|
°˙ ROBO-ONE ¬Ë£∂≤Û ¥∂¡€ (ÕΩ¡™ ‘)
∫£≤Û§œÕΩ¡™¡∞∆¸§À≈∞ÃΧ∑§∆§§§ §§(§»§§§√§∆§‚ø≤§ø§Œ§œ£≥ª˛¥÷)§´§È¥∂¡€§¨ΩÒ§±§Î(æ– §Þ§∫§œ°÷ÕΩ¡™°◊§Œ¥∂¡€ 𵧮ºº§Œ•‚•À•ø°º§«§ø§Þ§À∏´§∆§§§ø§¿§±§ §Œ§«§¢§Þ§Í•≥•·•Û•»§«§≠§ §§§±§…°ƒ ÕΩ¡™§¨¥∞¡¥º´Œ©§À§ §√§ø§≥§»§«°¢≈æ≈ð§π§Î§Ë§¶§ õ√„§ ∆∞∫Ó§Ú§∑§ §§•Ì•Ð•√•»§¨¬ø§´§√§øµ§§¨§∑§Þ§π°£ §Ω§Ï§«§‚°¢•÷•Ï•§•–°º•»§Œ§Ë§¶§Àƒπ¡‰§Úª˝§√§ø§Þ§Þœ¢¬≥¡∞≈æ§π§Î•Ì•Ð§‰°¢µ»º∞§Œ§Ë§¶§À≤Ã¥∫§À…‘¿∞√œ ‚π‘§Ú•¢•‘°º•Î§π§Î•Ì•Ð§œ§§§Þ§∑§ø°£ §«§‚°¢∞µ¥¨§œÕΩ¡™∞Ï∞çŒA-Do£∂πʵ°§Œ•π•≠•√•◊§«§∑§Á§¶§´°£ …·ƒÃ§Œ ‚𑧫§œ§ §Ø°¢º¥¬≠§Ú√§§§ø§»§≠§À§¡§Á§≥§√§»•∏•„•Û•◊§π§Î§Œ§«§π°£ ±∆§µ§Û§Œ•‚°º•∑•Á•Û∫ӿƧŒµª§Œ∂À§þ§Ú∏´§øµ§§¨§∑§Þ§π°£ ∆¨§Œ√ʧÀ•∑•„•Ð•Û∂Ã¿Ω¬§µ°§Ú∆˛§Ï§Î§»§´°¢¥—µ“§Œ«ÔºÍ§«∆∞∫Ó§¨ —§Ô§Î§»§§§¶ø˚∏∂§µ§Û§Œ•¢•§•«•¢§‚§µ§π§¨°£ •Æ•„•È•Í°º§Ú≥⁄§∑§Þ§ª§Î§≥§»§ÀΩ≈≈¿§Ú√÷§§§∆§§§Î§Œ§¨§Ë§Ø»Ω§Í§Þ§π°£ §¡§ §þ§À°¢≈”√ʧ«Ã¿§´§µ§Ï§ø(°™°©)∫Œ≈¿ ˝À°§œ °¶µ¨ƒ¯±Èµª(ÀЧŒ≈–§Íπþ§Í)§¨§«§≠§∆£∞≈¿ °¶√ÌÃЧµ§Ï§Î∆∞∫Ó§¨§¢§Î§»≤√≈¿ °¶ºÍ§«•Ì•Ð•√•»§ÚŒ©§∆ƒæ§π§ §…§ŒºÍ§Úø®§Ï§Îπ‘∞Ÿ§¨§¢§Î§»∏∫≈¿ §«§∑§ø°£ ÕΩ¡™ƒÃ≤·•Ì•Ð•√•»§œ§…§Ï§‚ ‚𑧨∞¬ƒÍ§∑§∆§§§∆°¢•∏•„•§•Ì§À§Ë§Îª—¿™ ‰¿µ§¨…¨¡≥§À§ §√§ø¥∂§∏°£ ≤√¬Æ≈Ÿ•ª•Û•µ°º§Úª»§√§ø°÷≈æ≈𧴧ȧŒº´∆∞…¸µ¢°◊§¨§«§≠§Î•Ì•Ð§‚¬ø§Ω§¶§«§π°£ º°§œ°¢°÷•∏•„•§•Ì§À§Ë§Îª—¿™ —≤Ω∏°Ω–§Ú§…§Ï§Ø§È§§§¶§Þ§Øª»§¶§´°◊§»§§§¶•Ω•’•»ÃçÀ§ §Î§Œ§´§ °ƒ (∏‘¥ÿ¿·•Ë°ºº¥§¨£∞≈Ÿ∞ ≥∞§Œ§»§≠§À°¢•Ì°º•Îº¥°¢•‘•√•¡º¥§Œ•∏•„•§•ÌΩ–Œœ§Ú§…§¶≥‰§Í≈ˆ§∆§Î§´≈˘) §Ω§Ï§»°¢•µ°º•Ð§´§È§Œ≤Û≈æ≥—≈Ÿ•’•£°º•…•–•√•Ø§Ú§…§¶¿∏§´§π§´°£ §¢§»°¢°÷∑¡§À§≥§¿§Ô§√§ø•Ì•Ð°◊§¨¡˝§®§∆§§§Î§Ë§¶§Àª◊§§§Þ§∑§ø°£ ¬≠§¨§π§È§√§»ƒπ§´§√§ø§Í°¢§¡§„§Û§»¥È§¨§¢§√§ø§Í°¢≤ƒ∆∞Õ„§¨…’§§§∆§§§ø§Í(æ– °÷ ‚§Ø§Œ§œ≈ˆ¡≥°¢±Èµª§»∏´§øÃЧ«§…§Ï§Ø§È§§√ÌÃЧÚΩ∏§·§Î§´°◊ §»§§§√§ø¥∂§∏§«§∑§Á§¶§´°£ ÀпԧŒ¿Ô§§§‚Ãëڧ§§«§π§¨°¢ÕΩ¡™§«§Œ•«•‚•Û•π•»•Ï°º•∑•Á•Û§‚§…§Û§…§ÛÃëڧا §√§∆§§§Î§»ª◊§§§Þ§π°£ (•Ì•Ð¿Ω∫Óº‘§»§∑§∆§œ§Õ) °˘[•≥•·•Û•»] | |
| 2004/08/08 | |
|
°˙ ∂¬Á•¡°º•ýÕ•æ°§™§·§«§»§¶
°ƒ§√§∆°¢¡∞≤Û§‚§≥§Œ•ø•§•»•Î§¿§√§ø§Ë§¶§ °ƒ ∞µ≈ð≈™§ •—•Ô°º§«5Kg§Œµ¬Œ§ÚΩæÕ˃çͧŒ•π•‘°º•…§«∆∞§´§πµªŒÃ§œ§µ§π§¨§«§∑§ø°£ °÷RVŒÃª∫§Œ∂«§À§œ FREEDOM III§ §æ°¢§¢§√§»∏¿§¶¥÷§À√°§§§∆§þ§ª§Î§Ô°™°◊ §»§§§¶¿º§¨ π§≥§®§Î§Ë§¶§ °ƒ (ÃµÕ˝§«§π°£§¢§Û§ §ŒŒÃª∫§∑§ø§ÈÕΩªª§¨§§§Ø§È§¢§√§∆§‚¬≠§Í§Þ§ª§Û) FREEDOM III §»∆±§∏ Dinamixel §Úª»§√§ø¥⁄πҕ̕ЧŒ∆∞∫Ó§Œ•π•ý°º•∫§µ§‚ÃЧÚ∏´ƒ•§Î§‚§Œ§¨§¢§Í§Þ§∑§ø°£ ŒÆπ‘§œ°÷∑⁄ŒÃæÆ∑ø°◊§´§È°÷Ω≈ŒÃµÈ•œ•§•—•Ô°º∑ø°◊§ÿ∞ЧΧŒ§´§‚§∑§Ï§Þ§ª§Û°£ º°§ŒÃÐ…∏§œ 10/30,31 §Œ°÷ROBO-ONE•π•⁄•∑•„•Î in ≤÷§‰§∑§≠°◊ •¿•√•∑•Â§¿§±§«§‚Ω–æϧ∑§ø§§§»ª◊§§§Þ§π°£ --- ∫£≤Û§‚øß°π§ ˝§»§™œ√§¨§«§≠§∆ Ÿ∂اÀ§ §Í§Þ§∑§ø°£ ∫£∏§»§‚§Ë§Ì§∑§Ø§™¥Í§§§∑§Þ§π°£ °˘[•≥•·•Û•»] |
 ÀпԧÀΩ–æϧ∑§ø•Ì•Ð•√•»§ø§¡ |
| 2004/08/07 | |
|
°˙ X+12h §Ω§∑§∆∫£≤Û§‚¥˛∏¢°ƒ
∫£≤Û§œ√ŸπÔ§π§Î§≥§»§‚§ §Øª≤≤√ºı…’§¨§«§≠§Þ§∑§ø°£ °ƒ§¨ ªˆ¡∞ø≥∫∫§Úºı§±§Î§Þ§«§‚§ §Ø¥˛∏¢§«§π°£(µ„ ±˛±Á§ÀÕ˧∆§§§ø§¿§§§ø ˝§À§œ°¢•¥°º•Ï•ý§Ø§Û§Œ∂˛ø≠ª∞≤Û§«≤ÊÀ˝§∑§∆§§§ø§¿§≠§Þ§∑§ø°£ §∑§´§∑°ƒ£≤«Ø»æ§´§±§∆§Ë§¶§‰§Ø∂˛ø≠§¿§±§»§œ°¢≈≈ª“π©≥ÿ§ÚΩ§§·§øø»§»§∑§∆§œ√—§∫§´§∑§§§´§Æ§Í°ƒ §þ§ §µ§Û§´§È°÷§≥§≥§Þ§«Õ˧ø§È§¢§»§‚§¶§¡§Á§√§»§¿§´§È°◊§»§§§¶ŒÂ§Þ§∑§Œ∏¿Õ’§Ú§§§ø§¿§§§ø§Œ§«°¢10∑Ó§ŒROBO-ONE•π•⁄•∑•„•Î§À∏˛§±§∆¥Ëƒ•§Í§ø§§§»ª◊§§§Þ§π°£ °˘[•≥•·•Û•»] |
 •¥°º•Ï•ý§Ø§Û∂˛ø≠∆∞≤Ë (mpeg1 3.4MByte) ª£±∆°ßjintaro§µ§Û |
|
°˙ X-5h ∫£≤Û§‚ªˆ¡∞ø≥∫∫ƒÃ≤·§«§≠§ §§°ƒ
°ƒ ‚§±§ §§§Ë°ƒ §√§∆§§§¶§´∫∏±¶§Œ¬ŒΩ≈∞Ð∆∞§π§È§«§≠§ §§°ƒ ≤ÒæϧÀ•¥°º•Ï•ý§Ø§Û§Úœ¢§Ï§∆§œπ‘§≠§Þ§π§¨°¢ªˆ¡∞ø≥∫∫§ÚƒÃ≤·§«§≠§Ω§¶§À§¢§Í§Þ§ª§Û°£ (µ„ °˘[•≥•·•Û•»] | |
| 2004/08/06 | |
|
°˙ X-12h VAIO§Ø§Û…¸≥Ë°ƒ§´°©
º⁄§Í ™§Œ VAIO C1XE §œ Debian §Œ∫«æÆ•§•Û•π•»°º•Î§«§∑§ø°£ X11§Œ¿þƒÍ§‚§ §À§‚§µ§Ï§∆§ §Ø§∆°¢LAN•´°º•…§Œ•…•È•§•–§π§È∆˛§√§∆§ §§°ƒ¢˛|°±|°≤ §«°¢°÷§‚§∑§´§∑§ø§ÈΩº≈≈§µ§Ï§Î§Œ§´§‚°◊§»ª◊§√§∆°¢∆∞§´§ §§ VAIO§Ø§Û§ÚAC≈≈∏ª§À∑“§§§¿§Þ§Þ ¸√÷§∑§∆§þ§ø§È°ƒ ≈≈∏ª•È•Û•◊§¨≈¿Ã«§π§Î§Ë§¶§À§ §√§ø°º°º°º°º °¿(^-^)°ø §Ô°º§§ ɬÍ∞ϧƒ≤Ú∑Ë°£ ( ¸√÷§π§Î¡∞§À∞Ï≈Ÿ ¨≤Ú§∑§ø§Í§∑§∆§ø§Œ§«£≤ª˛¥÷§Œ•Ì•π) °˘[•≥•·•Û•»] | |
|
°˙ X-14h •‘°º•Û•¡ VAIO§Ø§ÛªýÀ¥
§ý°º°º°º°º °÷§Ω§Ì§Ω§Ìÿ∆¸§ŒΩý»˜§Ú°ƒ°◊§»ª◊§√§∆ VAIO C1S §Œƒ¥ª“§Ú∏´§Ë§¶§»§∑§ø§È°ƒ µØ∆∞§∑§ §§§∏§„§Û°™ °ƒ§√§∆§§§¶§´≈≈∏ª∆˛§È§ §§§∑°ƒ •–•√•∆•Í°º§¨¿⁄§Ï§∆§Î§Œ§´§»°¢AC≈≈∏ª§Ú∑“§§§«§þ§ø§±§…§‰§√§—§Í•¿•· ≈≈∏ª•È•Û•◊§π§È…’§´§ §§°£ çŒAC≈≈∏ª§À∑“§Æ —§®§∆§‚•¿•· •–•√•∆•Í°º§Œ∏Œæ„§Úµø§√§∆°¢•–•√•∆•Í°º§Ú≥∞§∑§∆AC≈≈∏ª§À∑“§§§¿§±§…•¿•· BIOS§Œ•–•√•Ø•¢•√•◊≈≈√”§¨ªý§Û§¿§´§ °ƒ ÿ∆¸§œ°¢Õß√£§´§Èº⁄§Í§∆§§§ø VAIO C1XE §Úœ¢§Ï§∆π‘§Ø§∑§´§ §§§´°ƒ §¢°º°º §√§∆§≥§»§œ WideStudio ª»§®§ §§§∏§„§Û §Î§Î§Î°ƒ (T-T °˘[•≥•·•Û•»] | |
| 2004/08/05 | |
|
°˙ X-1d12h ∂˛ø≠§«§≠§Î§Ë§¶§À§ §Í§Þ§∑§ø
§ §Û§»§´∂˛ø≠§«§≠§Î§Ë§¶§À§ §Í§Þ§∑§ø°£(∆∞≤˧œ§¢§»§«) L-Card槌•∑•ß•Î•π•Ø•Í•◊•»§´§È PIC§ÿ•≥•Þ•Û•…¡˜øƧ∑§∆§§§Î§Œ§«§π§¨°¢∞’≥∞§»§≠§”§≠§”∆∞§§§∆§§§Î§Ë§¶§ °ƒ …√¥÷£∏•’•Ï°º•ý§Ø§È§§∆∞§§§∆§Î§þ§ø§§°£ (°÷£±•’•Ï°º•ý°·23∏ƒ§Œ•µ°º•Ð§ÿ§Œ∞Ï≥Á≥—≈Ÿªÿº®°◊§»§§§¶∞’㧫ª»§√§∆§§§Þ§π) ∫£≤Û§œ•∑•ß•Î•π•Ø•Í•◊•»§Œ§Þ§Þ¥Ëƒ•§Ì§¶°£ ∏Ω∫þ°¢∏‘¥ÿ¿·•Ì°º•Îº¥§Œ•µ°º•Ð§Ú•œ•§•—•Ô°º•Æ•‰§À∏Ú¥π√Ê ∫£∆¸√ʧÀ¬≠∆ߧþ§«§≠§Î§Ë§¶§À§ §Î§´§ °ƒ °˘[•≥•·•Û•»] | |
| 2004/08/04 | |
|
°˙ X-2d10h (URL•·•‚) Maxima : a sophisticated computer algebra system
IRC§«°÷π‘ŒÛº∞§¨§Ô§´§È§Û°º°◊§√§∆∏¿§√§∆§ø§È °÷Maxima ª»§√§∆ Ÿ∂ا∑§ §µ§§°◊§»∏¿§Ô§Ï§Þ§∑§ø°£ Maxima - a sophisticated computer algebra system ExciteÀðÃı(AMIKAI)§À§Ë§Î§»°¢•ø•§•»•Î§Œ∆¸ÀÐ∏ÏÃı§œ °÷Maxima - ¿∫𙧠•≥•Û•‘•Â°º•ø°º¬ÂøÙ•∑•π•∆•ý°◊ §È§∑§§°£ (§€§Û§»§œ Maxima §Ú °÷∫«¬Á∏¬°◊§»Ãı§∑§∆§Ø§Ï§ø§±§…) °ƒª»§§§≥§ §ª§Î§Œ§´§ §°°ƒ #¥÷∞„§√§∆§‚•’•°•∆•£•Þ§‚§…§≠§Œ§≥§»§«§œ§¢§Í§Þ§ª§Û°£ --- 2004/08/05 00:05 ƒ…µ≠ §¡§ §þ§À°¢§Ô§´§È§ §§§Œ§œ °÷DHÀ°§À§Ë§ÎΩÁ°¶µ’±ø∆∞≥ÿ°◊ (OGAWA'S ROBOT LAB) §À∫Ч√§∆§Î§Ë§¶§ π‘ŒÛº∞§«§π°£ °˘[•≥•·•Û•»] | |
| 2004/08/03 | |
|
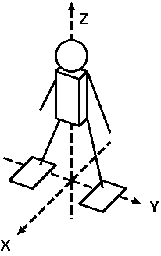
°˙ X-3d15h ∫¬…∏∑œ
øß°ππÕ§®§∆§þ§ø§±§…°¢¥ÿ¿·≥—≈Ÿ§Ú§“§»§ƒ§“§»§ƒªÿƒÍ§∑§∆ ‚§´§ª§Î§Œ§œ§·§¡§„§·§¡§„¬Á —§Ω§¶°ƒ § §Œ§«°¢§‰§√§—§Í∑◊ªª§µ§ª§Ë§¶°£ (…È≤Ÿ§«•µ°º•Ð∞Ã√÷§¨§∫§Ï§Î§¿§Ì§¶§±§…ª≤πÕ§À§œ§ §Î§œ§∫°ƒ) ∫∏±¶§Œ¬≠§ÀΩ≈ø¥§Ú∞Ч∑§ƒ§ƒ°¢π¯…Ù ¨§Œ¡∞ø ¬Æ≈Ÿ§Ú∞σͧÀ§∑§∆°¢§µ§È§ÀŒæ¬≠Œ¢§Œ∞Ã√÷§¨∆∞§´§ §§§Ë§¶§ ∆∞∫Ó§Ú¡€ƒÍ§∑§ø§»§≠§Œ¥ÿ¿·≥—≈Ÿ§Ú∑◊ªª§π§Ï§–§§§§§œ§∫°ƒ §Þ§∫°¢∫¬…∏∑œ§Ú§…§¶§π§Î§´∑˧·§Ë§¶§»ª◊§√§∆°¢°÷•Ì•Ð•√•» ∫¬…∏∑œ°◊§«Google§∑§∆§þ§ø§È°¢§ §Û§´øß°π∏´§ƒ§´§√§ø°£ §Û°º°¢£≤«Ø¡∞§À∏°∫˜§∑§ø§»§≠§À§œÕ≠Õ—§ §Œ§¨Ãµ§´§√§ø§»ª◊§√§ø§Œ§À°ƒ ∫¬…∏∑œ§œ ¡∞ ˝∏˛§Ú Xº¥°¢∫∏ºÍ ˝∏˛§Ú Yº¥°¢æ ˝∏˛§Ú Zº¥ §À§∑§Þ§π°£ --- §§°¢∫£§¥§Ì§≥§Û§ §≥§»§∑§∆§∆¬ÁæÊ…◊§ §Œ§√°™°© (§ §Û§´°¢¡∞≤Û§‚ƒæ¡∞§À∆±§∏ÕÕ§ §≥§»§∑§∆§Î°ƒ) °˘[•≥•·•Û•»] |
|
| 2004/08/02 | |
|
°˙ X-5d8h ‚π‘Œ˝Ω¨√Ê°ƒ(¬ÁæÊ…◊°©
∏‘¥ÿ¿·•‘•√•¡º¥§Œ•µ°º•Ð§Ú KRS-2346ICS §À∏Ú¥π •Ì°º•Îº¥§Œ•µ°º•Ð§Œ•Æ•‰∏Ú¥π§œ∏Â≤Û§∑°ƒ § §Û§»§´ “¬≠§«Œ©§ƒ§»§≥§Ì§Þ§«π‘§≠§Þ§∑§ø°£ °ƒ§¨ Õ∑µ”§Ú§¡§Á§√§»∆∞§´§∑§∆Ω≈ø¥∞Ã√÷§¨§∫§Ï§Î§»°¢¬≠ºÛ•‘•√•¡º¥§Œ•µ°º•Ð§¨…ȧ±§∆§∑§Þ§§§Þ§π°£ …ȧ±§Î¡∞§ÀÕ∑µ”§Ú√œÃçÀ…’§±§Ï§–§§§§§Œ§´§ °ƒ ¡∞≈”¬ø∆Ò°£ ∫£∆¸»Ω§√§ø§≥§»)
ªƒ§Í…¨øÐ∫Ó∂»)
¥÷§ÀπÁ§Ô§ §§§ §Èƒ¸§·§Þ§∑§Á§¶)
Ã⁄∂‚§™µŸ§þ§π§Î§±§…°¢§Ω§Ï§«§‚¥÷§ÀπÁ§Ô§ §Ω§¶°ƒ °˘[•≥•·•Û•»] | |
| 2004/07/30 | ||||||||||||||
| °˙ X-6 ‚π‘Œ˝Ω¨≥´ªœ | ||||||||||||||
|
§‰§–§§°ƒ§¢§»∞ÏΩµ¥÷õ§§°ƒ °÷ ‚π‘Œ˝Ω¨°◊§»§§§§§ƒ§ƒ°¢º¬§œ§Þ§¿∂˛ø≠§ŒŒ˝Ω¨ (¥¿ §«°¢¥ÿ¿·≥—≈Ÿ§Œªÿº®§Ú¥÷∞„§®§Î§»°¢ ‚π‘ ‰Ωı¥Ô(§ƒ§√§—§ÍÀ¿)§¥§»ø·§≠»Ù§Û§«°¢§ƒ§√§—§ÍÀ¿§Ú√÷§§§∆§§§Î•∆°º•÷•Î§Œæ§Œ§‚§Œ§‚¥¨§≠≈∫§®§À°ƒ (£≤ÀÁ§ŒºÃøø§Œ¥÷§«µØ§≠§Þ§∑§ø) §≥§Œ§Þ§Þ ‚π‘Œ˝Ω¨§Ú§π§Î§´°¢ §‚§√§»•Þ•∑§ ¡ý∫Ó•◊•Ì•∞•È•ý§Ú∫ӧΧ´°¢ ∏Â≤Û§∑§À§ §√§∆§§§Îõ¿˛…Ù ¨§Úª≈æ§≤§Î§´°¢ §…§¶§∑§Ë§¶§´°ƒ §√§∆°¢∫Ú∆¸§Œ∫Ó∂»§« °÷∏‘¥ÿ¿·•µ°º•Ð§¨•Œ°º•Þ•Î•Æ•‰§Œ§Þ§Þ§«§œŒ©§√§∆§§§Î§Œ§‚¬Á —°◊ §»§§§¶ªˆº¬§¨»Ωÿ§∑§ø§Œ§«°¢•µ°º•Ð§Œ•Æ•‰∏Ú¥π§¨∫«Õ•¿Ë§«§π°£ °˘[•≥•·•Û•»] |

| |||||||||||||
| 2004/07/29 | ||||||||||||||
|
°˙ X-8 ª≈ªˆ§™§Ô§È§ §§§Ë§©§©§©
§ §Û§«§≥§¶¬Á≤Ò§¨∂·…’§Ø§»Àª§∑§Ø§ §Î§´§ §°°ƒ §√§∆§§§¶§´°¢Õæ∑◊§ •»•È•÷•Î§Àµ§…’§Ø§ §Ë§√ °‰ ª‰ °ƒ¬Á≤Ò§¨Ω™§Ô§Î§Þ§«Ã€§√§∆§Ï§–Œ…§´§√§ø°ƒ (T-T §ª§√§´§Ø∫Ó§√§ø•¥°º•Ï•ý§Ø§Û ‚π‘ ‰Ωı¥Ô(°©)§‚ª»§Ô§ §§§Þ§Þ°£ § §Û§∆∆¸µ≠ΩÒ§§§∆§Î≤À§¨§¢§√§ø§Èª≈ªˆ§∑§Ì§√§∆§–°£ °˘[•≥•·•Û•»] |
 •¥°º•Ï•ý§Ø§Û with ‚π‘ ‰Ωı¥Ô | |||||||||||||
| 2004/07/26 | ||||||||||||||
|
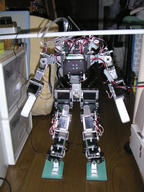
°˙ X-11 ROBO-ONE¬Á≤Òƒæ¡∞∆√ Õª°º•Î
ROBO-ONE¬Á≤Òƒæ¡∞∆√ Õª°º•Î KRS-2346ICS Red version•–•Î•Ø»« °ƒ ∂‚ÕÀ∆¸§Œ√Ì ∏… §¨∫£∆¸§Œƒ´∆œ§§§ø§–§´§Í§ §Œ§À°ƒ ∞¬§Ø§ §Î§»√Œ§√§∆§§§ø§È§Þ§»§·§∆£¥§ƒ«„§√§ø§Œ§À°ƒ (T-T °˘[•≥•·•Û•»] | ||||||||||||||
| 2004/07/24 | ||||||||||||||
|
°˙ §´§√§≥§§§§§ §°°ƒ
•Þ•§•π•ø°ºµ»¬º§Œø∑∑øµ°(RBN-007)§À≤–§¨∆˛§√§ø§È§∑§§°£ §§§§§ §°°ƒ§´§√§≥§Ë§π§Æ°£ §≥§Œ§Ø§È§§§Œ§‚§Œ§Ú∫ӧϧΧ˧¶§À§ §Í§ø§§§ °£ §«°¢æÆŒ”ª˚§Œ∞·¡ı§Ú√§ª§∆°ƒ(∞„ °˘[•≥•·•Û•»] | ||||||||||||||
|
°˙ X-13 ∫Ú∆¸§Œ§™«„ ™ (KRS-2346ICS Red °þ 2)
§Ô°º°º §‚§¶§¢§»£≤Ωµ¥÷õ§§°ƒ(¥¿ § §Û§«°¢§≥§Œª˛¥¸§Àªƒ∂»¡˝§®§Î§´§ °ƒ •œ•§•—•Ô°º•Æ•‰∏Ú¥π§ŒºÍ¥÷§» 25,000±þ§»§Ú≈∑«È§À§´§±§ø§È°¢ºÍ¥÷§¨…ȧ±§Þ§∑§ø°£ §≥§Œ±Í≈∑≤º§ÀΩ©Õ’§Ú§¶§Ì§¶§Ì§∑§ø§È≈ð§Ï§Î§Œ§«°¢ °⁄≥⁄≈∑ª‘æÏ°€•ƒ•Ø•‚ •Ì•Ð•√•»≤¶πÒ§«√Ì ∏°£ §’§»µ§§À§ §√§∆°¢§™≈π§ÿ§Œº¡Ã‰ÕÛ§À °÷≥⁄≈∑§«πÿ∆˛§π§ÎæÏπÁ•ƒ•Ø•‚§Œ•ð•§•Û•»§œ…’§´§ §§§Œ§«§∑§Á§¶§´°©°◊ §√§∆ΩÒ§§§ø§È °÷•ð•§•Û•»•´°º•…»÷πʧڧ¥œ¢Õ̧§§ø§¿§±§Þ§∑§ø§È•ð•§•Û•»§Ú§™…’§±§«§≠§Þ§π°£ °°∫∆≈Ÿ§¥œ¢Õ̧§§ø§¿§±§Þ§π§Ë§¶µπ§∑§Ø§™¥Í§§øΩ§∑æ§≤§Þ§π°£°◊ §√§∆ ÷ªˆ§¨°£ §™§™§√°™•È•√•≠°º °ƒ§√§∆°¢œ¢Õ̧π§Î§Þ§«ºË§Í√÷§≠§´°º §Ô°º§Û(T-T°£Õæ∑◊§ §≥§»ΩÒ§´§ §±§Ï§–Œ…§´§√§ø°ƒ •ð•§•Û•»§ §Û§´§§§§§´§È¡·§Ø¡˜§√§∆≤º§µ§§°£(•Þ•∏ ° ≤Òº“§«∫‚…€§Œ√ʧÚ∏´§ø§È•ƒ•Ø•‚§Œ•´°º•…∆˛§√§∆§ §´§√§ø°ƒ°À °˘[•≥•·•Û•»] | ||||||||||||||
| 2004/07/23 | ||||||||||||||
|
°˙ X-14 ª≤≤√»Òø∂π˛ §»§´ •–•√•∆•Í°º•—•√•Ø§»§´
§¢§÷§ §´§√§ø°º °÷ONO§Œ≈≈«æ …ø∑ π°◊§Œ…‘ƒÍ¥¸∆¸µ≠§«°÷…·ƒÃ§Œ≤Òº“∞˜§Œ∆¸µ≠°◊§Œø∂π˛§Œœ√§Ú∏´§ §´§√§ø§È°¢ø∂π˛¥¸∏¬≤·§Æ§Î§»§≥§«§∑§ø°£ §®°º§√§» •¥°º•Ï•ý§Ø§Û§œ∫£Ωµ§œ¡¥¡≥ø ƒΩõ§∑°ƒ •–•√•∆•Í°º•—•√•Ø∫ӿƧŒ§ø§·§À°¢∞ ¡∞πÿ∆˛§∑§ø GP1800 §Ú•µ•§•Ø•ÎΩº ¸≈≈§∑§∆§Î§¿§±°£ ∞ÏÀЧŒ ¸≈≈§À£¥ª˛¥÷§´§´§Î§Œ§¨ÃÃ≈𧠧ۧ¿§Ë§Õ§ß°ƒ(by YOKOMO YZ-144 A/D) ¸≈≈≈≈ŒÆ§‚ƒ¥¿∞§«§≠§Î§» ÿÕ¯§ §Û§¿§±§…°ƒ §»§Í§¢§®§∫£∂ÀÐΩ™§Ô§√§ø§´§È°¢£±•—•√•Ø∫Ó§Ï§Ω§¶°£ º°§œ TOSHIBA 2300 §Ú£∂Àаƒ °˘[•≥•·•Û•»] | ||||||||||||||
| 2004/07/19 | ||||||||||||||
|
°˙ (•·•‚) 07/24 (≈⁄) 19:00- NHK∂µ∞È °÷§≥§¡§È•Ì•Ð•≥•Ûæ Û•ª•Û•ø°º°◊
NHK∏¯º∞•⁄°º•∏°÷≤∆§Œ∆√Ω∏»÷¡»2004°◊°÷∂µ∞È°ø•«•∏•ø•Î∂µ∞È°◊ §≥§¡§È•Ì•Ð•≥•Ûæ Û•ª•Û•ø°º 7∑Ó24∆¸° ≈⁄°À∂µ∞È°¶∏Â7°¶00°¡7°¶45 °°¡ˆ§Î°¢•Ð°º•Î§Ú≈ͧ≤§Î°¢•È•√•—§Úø·§Ø°ƒ°ƒ°£ §≥§ §§§¿§Œ ROBO-ONE Dash Trial§ŒºË∫ý±«¡¸§œ§≥§≥§«ŒÆ§Ï§Î§Œ§´§ °ƒ §≥§Œª˛¥÷¬”§√§∆°÷•µ•§•®•Û•πZERO°◊§¿§√§ø§Ë§¶§ °ƒ §¢°¢§¿§´§È‚√∆ȧ´§Ú§Í§µ§Û§œÕ˧ §´§√§ø§»°ƒ (∞„ °˘[•≥•·•Û•»] | ||||||||||||||
|
°˙ X-18 KRS-2346ICS
…‘ƒ¥§Œ∫∏¬≠ºÛ•Ì°º•Îº¥§Œ•µ°º•Ð°£ 欶•±°º•π§¿§±§Ú 猧‚§Œ§»∏Ú¥π§∑§ø§±§…§¢§§§´§Ô§È§∫°ƒ §ý°º§Û°ƒ •µ°º•Ð§Ú≥∞§∑§ø§ƒ§§§«§À°¢¿Ë∆¸πÿ∆˛§∑§ø2346ICS§Ú §Þ§∏§´§Î•≥•¢§À∑“§§§«§þ§ø§È°ƒ 700¶Ãsec°¡2300¶Ãsec§Œ•—•Î•π§Ú¡˜§√§∆§¢§≤§Î§»°¢§¡§„§Û§»180≈Ÿ∆∞§≠§Þ§∑§ø°£ 20¶ÃsecπÔ§þ§Œ•—•Î•π§∑§´Ω–§ª§ §§§´§È°¢≥—≈ŸªÿƒÍ§œ 2.2≈Ÿ√±∞ð£ ÕΩ»˜§À§¢§»£≤§ƒ«„§√§∆§™§≥§¶§´§ °ƒ °˘[•≥•·•Û•»] | ||||||||||||||
| 2004/07/17 | ||||||||||||||
|
°˙ X-20 •®•Û•»•Í°º»÷πÊ0094
ºıÕ˝§µ§Ï§Þ§∑§ø°£ 7/17 21:20 øΩ§∑π˛§þ§« 94»÷ §≥§Œª∞œ¢µŸ§«¥Ëƒ•§È§ §≠§„°ƒ °ƒ§»ª◊§¶§Û§¿§±§…°¢¬Œƒ¥∫«∞≠ ∆¨ƒÀ§Ø§∆§ §À§‚§«§≠§ §µ§Ω§¶°ƒ °˘[•≥•·•Û•»] | ||||||||||||||
| 2004/07/15 | ||||||||||||||
|
°˙ X-22 •®•Û•»•Í°º•∑°º•»¡˜…’¥∞Œª
•¥°º•Ï•ý§Ø§Û§À•’•°•§•∆•£•Û•∞•ð°º•∫§»§È§ª§∆°¢ºÃøøª£§√§∆°ƒ °ƒ§ §Û§∆ª◊§√§∆§§§ø§Œ§À°¢§ §º§´§Þ§¿ø¶æÏ (T-T ¥÷§ÀπÁ§Ô§ §Ø§ §Î§»…𧧧Œ§«°¢ø¶æϧ«•®•Û•»•Í°º•∑°º•»∫Ó§√§∆¡˜…’§∑§¡§„§§§Þ§∑§ø°£ ¬Ë5≤Û§Œ•®•Û•»•Í°º•∑°º•»§Ú•≥•‘°º§∑§∆°¢°÷§€°º§È¥∞¿Æ°◊§»ª◊§√§ø§È°ƒ »˘ÃاÀπýÃÐ∞„§√§∆§Î°ƒ(§¢§ø§’§ø §∑§´§‚°¢æÔÕ—§∑§∆§§§Î•·°º•Î•µ°º•–§À∑“§¨§È§ §§°ƒ(•Î°º•ø§¨ÕÓ§¡§∆§Î…˜Ã£ ª≈ ˝§¨§ §§§Œ§«°¢ø¶æϧŒ•·°º•Î•µ°º•–§´§È¡˜…’§∑§Þ§∑§ø°£(¥¿ °˘[•≥•·•Û•»] | ||||||||||||||
| 2004/07/14 | ||||||||||||||
|
°˙ X-23 •–•√•∆•Í°º•—•√•Ø§¨°ƒ
∫Ú∆¸§Œ»’°¢µ◊§∑§÷§Í§À•–•√•∆•Í°º§«∆∞§´§Ω§¶§»ª◊§√§∆°¢•≥•Õ•Ø•ø§Ú∑“§§§«§þ§ø§È°ƒ L-Card§‚µØ∆∞§«§≠§ §§§Ø§È§§ ¸≈≈§∑§∆§Þ§∑§ø°£ §«°¢°÷§ø§∑§´ÕΩ»˜§Œ•–•√•∆•Í°º•—•√•Ø§Ú∫Ó§√§ø§œ§∫°ƒ°◊§»ª◊§√§∆°¢§§§Ì§§§Ì√µ§∑§∆§þ§ø§±§…∏´≈ˆ§ø§È§ §§°ƒ §ý°º§Û°ƒ ¸≈≈§∑§≠§√§∆§§§ø•–•√•∆•Í°º§Ú•»•Í•◊•ÎµÞ¬ÆΩº ¸≈≈§∑§∆§þ§ø§È°¢Õ∆ŒÃ 1360mAh §¿§√§∆°ƒ(§©§£§™§£ §‚§»§œ 1900mAh §Ø§È§§§¢§√§ø§Œ§À°ƒ --- °÷•Þ•§•Ø•Ì•Þ•¶•ππ©Àº°◊§Ú∏´§∆§þ§ø§È°¢øπ± §µ§Û§‚≈≈√”•—•√•Ø§¨π‘ ˝…‘ÿ§ ÃœÕÕ°ƒ(æ– --- §¢°¢Ã§Ã¿§ÀΩÒ§§§ø∆¸µ≠§Œ•´•¶•Û•»•¿•¶•Û§¨¥÷∞„§√§∆§Î°ƒ§´§ X-24 §∏§„§ §Ø§∆ X- 23 days - 32 hour (»Ω§Í§À§Ø§§§√§∆§–°ƒ) •π•Ø•Í•◊•»ƒæ§µ§ §≠§„§Õ°ƒ (ÕΩ¡™≈ˆ∆¸§Œ 10:00 §ÚµØ≈¿§À§∑§∆§Î§Œ§«§π) °˘[•≥•·•Û•»] | ||||||||||||||
|
°˙ X-24 L-Card+2M ¥ƒ∂≠¿∞»˜ (busybox∆˛§Ï¥π§®)
L-Card+16M §«§Œ∑–∏≥§Ú∏µ§À°¢•¥°º•Ï•ý§Ø§Û§Œ«ÿ√ʧÀ…’§§§∆§§§Î L-Card+2M §Œ¥ƒ∂≠¿∞»˜≥´ªœ°£ °ƒ§√§∆°¢§µ§√§µ§»•®•Û•»•Í°º•∑°º•»ΩÒ§±§Ë§√°™§©§£ §Þ§∫°¢mkfs.minix §Úª»§®§Î§Ë§¶§À§π§Î§ø§·§À°¢¿Ææ槵§Û§Œ§»§≥§À§¢§Îbusybox §Ú∆≥∆˛°£ §«°¢¡·¬Æ RAMDISK§Ú∫ӧ̧¶§» mkfs.minix /dev/ram0 §∑§∆§þ§ø§È°ƒ [root@(none) ~]%mkfs.minix /dev/ram0 mkfs.minix: /dev/ram0: No such device or address °ƒ L-Card+2M§Œ•«•’•©•Î•»Kernel§À§œ RAMDISK•…•È•§•–§¨∆˛§√§∆§ §§§Œ§Õ°ƒ kernel §Œ config §Ú§‰§Ï§»°ƒ °˘[•≥•·•Û•»] | ||||||||||||||
| 2004/07/08 °˙ X-29 | ||||||||||||||
|
°˙ L-Card≥´»Ø¥ƒ∂≠(§Ω§Œ6: rsync∆≥∆˛)
(∫Ó∂»§∑§ø§Œ§œ¡·ƒ´§ §Û§¿§±§…) ntp §Œ∆≥∆˛¿Æ∏˘§Àµ§§ÚŒ…§Ø§∑§∆°¢rsync §Ú∆˛§Ï§∆§þ§Ë°º§√§∆ª◊§√§∆°¢ rsync-2.3.2-1k1.mipsel.rpm(~kei's Linux-VR)§Úª˝§√§∆§≠§∆∆˛§Ï§∆§þ§ø§Û§¿§±§…°ƒ °ƒrsh §¨Ãµ§§§»∆∞§´§ §§§þ§ø§§°£ (ÀÐ≈ˆ§œ rsync: •◊•Ì•»•≥•Î§«∆∞§´§π ˝À°§¨§Ô§´§È§ §´§√§ø) §«°¢§µ§È§À rsh-0.16-12.mipsel.rpm(Linux-MC) §Úª˝§√§∆§≠§∆•§•Û•π•»°º•Î °ƒ§∑§ø§È°¢∫£≈Ÿ§œ libpam.so.0 §¨Ãµ§§°ƒ §«°¢pam-0.72-20.mipsel.rpm(Linux-MC)§Úª˝§√§∆§≠§∆≈∏≥´§∑§∆°¢/lib «€≤º§Œ•’•°•§•Î§Ú¡¥…Ù∆˛§Ï§∆°ƒ §Ë§¶§‰§Ø∆∞§≠§Þ§∑§ø°£ ∞Ï»÷«∫§Û§¿§Œ§œ°¢ƒÃøƧ«§≠§∆§Î§Œ§À«ßæ⁄•®•È°º§À§ §√§∆§ø§≥§»°£ .rhosts § §Û§∆µ◊§∑§÷§Í§ÀΩÒ§§§ø°ƒ ∫Ú∆¸√Ÿ§Ø§Þ§«∫Ó∂»§∑§∆»Ë§Ï§¡§„§√§ø§Œ§«°¢∫£ÃΧŒ∫Ó∂»§œºË§Í§‰§·§«§π°£ ‚𑧫§≠§Î§Ë§¶§À§ §√§∆§´§È•®•Û•»•Í°º§∑§ø§§§Û§¿§±§…°ƒ¥÷§ÀπÁ§¶§´§ °ƒ --- ∫Ó∂»§Œ≈”√ʧ«∂ˆ¡≥ Linux-VR-FAQ§Œ•⁄°º•∏§Ú»Ø∏´°£ Agenda-VR3 §Úª»§√§∆§ø∫¢°¢øÔ ¨∏Ê¿§œ√§À§ §√§ø§√§±°ƒ °˘[•≥•·•Û•»] | ||||||||||||||
|
°˙ L-Card≥´»Ø¥ƒ∂≠(§Ω§Œ5: •¿•§• •þ•√•Ø•Í•Û•Ø¬–±˛)
§ §Û§´°¢∆‚Õ∆§¨•Ì•Ð§»Œ•§Ï§∆§§§Øµ§§¨°ƒ £Ã£È£Ó£ı£¯∆¸µ≠£≥§À§Ë§Î§»°¢L-Card+16M §œ•¿•§• •þ•√•Ø•Í•Û•Ø§À¬–±˛§∑§∆§§§ §§§È§∑§§°£ 2003.4.30 kaneta§µ§Û§´§È§¥∂µº¯ƒ∫§§§øæ Û boot_laser5_20010302.tar.gz §œ L-Card+2M§ŒCD…’¬∞§Œ§‚§Œ§Úª˝§√§∆§§§ø§Œ§«°¢§Ω§Ï§Ú•Þ•§•Ø•Ì•…•È•§•÷§À≈桘§∑§∆≈∏≥´°£ #cd /mnt/cf #wget http://192.168.0.1/L-Card/install/boot_laser5_20010302.tar.gz #tar zxvf boot_laser5_20010302.tar.gz §«°¢∏µ§Œ /lib §»∆˛§Ï¥π§® #ln -s boot_laser5_20010302/lib ./lib #mv /lib /lib.org #ln -s /mnt/cf/lib /lib ªÓ§∑§À ntpdate §Ú∆˛§Ï§∆§þ§Þ§π°£ •·•§•Û•Þ•∑•Û§À Linux-VRÕ— ntp§ŒRPM§Úª˝§√§∆§≠§∆°¢rpm2cpio hoge.rpm | cpio -id §«≈∏≥´§∑§∆§™§§§∆ $cd ~/L-Card/install $wget http://www.peanuts.gr.jp/~kei/Linux-MC/Incoming/Vine-2.1.5/RPMS/mipsel/xntp3-5.93-13vl2.mipsel.rpm $rpm2cpio xntp3-5.93-13vl2.mipsel.rpm | cpio -id ºË§ÍΩ–§∑§ø ntpdate §Ú L-Card §À≈桘§∑§∆º¬π‘°£ #wget http://192.168.0.1/L-Card/install/usr/sbin/ntpdate #chmod +x ntpdate #./ntpdate 192.168.0.1 8 Jul 01:33:10 ntpdate[1240]: step time server 192.168.0.1 offset 87.087831 sec §«§≠§ø°º°º°™°™ §≥§Ï§« L-Card+2M §»§€§Ð∆±∞Ï¥ƒ∂≠§«•«°º•øΩҥ𧮠¸¬Í§Œ≥´»Ø¥ƒ∂≠¥∞¿Æ°£ L-Card+2M §œ•¥°º•Ï•ý§Ø§Û§Œ«ÿ√ʧÀ§Ø§√§ƒ§§§∆§∆∫Ó∂»§¨§‰§Í§À§Ø§§§Œ§«°¢∏þ¥π¥ƒ∂≠§¨Õþ§∑§´§√§ø§Œ§«§∑§ø°£ ÿ∆¸§´§È§œƒÃøÆ•◊•Ì•∞•È•ý§Œ≥´»Ø§«§π°£ ( ‚§´§ª§Î§Œ§§§ƒ§ §Û§«§∑§Á§¶°ƒ°ß¥¿) °˘[•≥•·•Û•»] | ||||||||||||||
| 2004/07/07 °˙ X-30 | ||||||||||||||
|
°˙ L-Card≥´»Ø¥ƒ∂≠(§Ω§Œ4: telnetd §Œ¿þƒÍ°¢date•≥•Þ•Û•…ΩÒº∞)
°÷telnet§¨∑“§¨§È§ §§°º°◊§»ª◊§√§∆ƒ¥§Ÿ§∆§þ§ø§È°¢ telnetd §ŒµØ∆∞§Àº∫«‘§∑§∆§Î(¿Ææ槵§Û§Œ•⁄°º•∏)§È§∑§§°£ °¶µØ∆∞ª˛§À telnetd§ÚŒ©§¡æ§≤§Î°£ --- §¢§»°¢date •≥•Þ•Û•…§ŒΩÒº∞§œ date [OPTION]... [MMDDhhmm[[CC]YY][.ss]] [+FORMAT] ª≤πÕ°ßBusyBox∏¯º∞•⁄°º•∏ § §Œ§«À∫§Ï§ §§§Ë§¶§À°ƒ (§µ§√§µ§» ntpdate •§•Û•π•»°º•Î§∑§ §Ë°ƒ) --- ª≤πÕ§À§π§Î•⁄°º•∏°ß(•µ•§•»§¨∏∫§√§¡§„§√§øµ§§¨§π§Î°ƒ)
| ||||||||||||||
2021«Ø:
1Q
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø
2020«Ø: 1Q 2Q 3Q 4Q
2019«Ø: 1Q 2Q 3Q 4Q
2018«Ø: 1Q 2Q 3Q 4Q
2017«Ø: 1Q 2Q 3Q 4Q
2016«Ø: 1Q 2Q 3Q 4Q
2015«Ø: 1Q 2Q 3Q 4Q
2014«Ø: 1Q 2Q 3Q 4Q
2013«Ø: 1Q 2Q 3Q 4Q
2012«Ø: 1Q 2Q 3Q 4Q
2011«Ø: 1Q 2Q 3Q 4Q
2010«Ø: 1Q 2Q 3Q 4Q
2009«Ø: 1Q 2Q 3Q 4Q
2008«Ø: 1Q 2Q 3Q 4Q
2007«Ø: 1Q 2Q 3Q 4Q
2006«Ø: 1Q 2Q 3Q 4Q
2005«Ø: 1Q 2Q 3Q 4Q
2004«Ø: 1Q 2Q 3Q 4Q
2003«Ø
2002«Ø