まじかる☆マリオネット: 開発日誌 (2005 3Q)
トップページ
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
| 2005/09/30 X-? | |
|
★ 23:36
今日のお買物 (やじきた27巻、彩雲国物語、FSS DESIGNS)
   リンク先はアマゾン 会社帰りに久しぶりに本屋へ。 …と、明日発売のはずの「彩雲国物語 心は藍よりも深く」が棚に… その後、コミックの所へいったら「やじきた学園道中記」の新刊が一冊だけ残ってたのでお買い上げ。 さらに「F.S.S DESIGNS」も見つけたので購入。 もしかしてこれを描くために連載止まってる? (リンク先はそれぞれの出版社の作品紹介ページ) え?なんでこれが「ロボット」カテゴリーなのかって? そりゃあ、FSS DESIGNS がゴーレムくんの外装を作るための参考資料だからですよ。 (キャラばっかりでMHが載ってなかったら泣く…かも) わーん (T-T 良く見たら「A.K.D編」だって…エンゲージ載ってないじゃん。 ☆[コメント] | |
|
★ 0:49
今後のスケジュール (カンファレンス、練習会、ロボファイト、第9回大会)
夏休み前に放置した仕事に追われて全然作業できなかったり… 今週末に王国のリングで御披露目したかったのだけど、全然無理。 「日記なんか書いてる時間があったら作業すればいいのに…」という声は無視して今後参加予定のイベント一覧
カンファレンスまでには参加資格審査モーションができるようにしたい… ☆[コメント] | |
| 2005/09/25 X+8 | |
|
★ 21:54
帰宅&夏休み終了
1時間程前に自宅に戻って来ました。 9日間の総走行距離1060Km。 これで今年の夏休みも終わりです。 前半はROBO-ONE&高山観光 後半は実家でごろごろ&高校時代の友達と十数年ぶりに飲み会 またしても予選に出られなかったのは残念だけど、思いっきりリフレッシュできました。 高山観光は30年ぶりだったのかなかな… 久しぶりに屋台会館(実際に高山祭で使っている山車が展示されてます。「まつりの森」にあるのは観光客向けの見せ物)に行って巫女装束の係員さんに案内してもらいました。 なお、ゴーレムくんを見た父のコメントは 「倒れたら起き上がれない(加速度センサ付いてない)ようなロボットを大会に持って行くなんて恥をかきに行くだけじゃないか」 でした。 …むぅ… ☆[コメント] | |
| 2005/09/23 X+6 | |
|
★ 13:53
まだまだ夏休み
まだまだ夏休み満喫中(残り3日) 実家でごろごろしています。 ゴーレムくんは相変わらず前進、横歩き、起き上がりをバラバラにしか実行できません。そんな状態だけど甥っ子に見せたら大喜び。 まだ二歳なのにロボットって判るんですね。 バッグから出した姿を見て「かっこいい!」って(嬉 通電せずに坐ってるだけでも握手して楽しんでいたり。 歩行したときには興奮して喜んでました。 起き上がりを見せたときはちょっと驚いて逃げてたけど…(笑 こんな風に喜んでもらえると「ちゃんと動くようにしなきゃ」って気持ちになりますね。頑張らなきゃ。 あとで大林さんの今どきの何か画像を見せたら、ヨゴカスタムがお気に入りみたいで、「ロボット」「かっこいい」を連発。 小さい子はロボットロボットしてる方がいいのかな。 ☆[コメント] | |
| 2005/09/20 X+2 | |
|
★ 1:09
小さい足裏でも動きましたー
前進も横歩きも起き上がりもできました。 でもでも…今回も参加資格審査を通過できませんでした。 なぜって… 製作者が遅刻したから… orz 当日の朝6:00に実家に着いて、2時間仮眠した後、すぐに出かければ間に合ったかもしれないのですが… 「高速道路だから1時間ちょっとで着くでしょー」と甘くみて 朝ご飯食べた後、シャワーを浴びて9:00過ぎに出発したのでした。 しかし、高速道路のはずのその道は行程の半分近くが片側1車線の対面通行。 「こんな道を高速道路って呼ぶなぁーー!ばかーーー」 と車内で叫んでもあとの祭り。 会場に着いたのは11:30、資格審査の締め切りを12:00に延ばしていただいたものの、スイッチの処理と全モーションを繋ぐ処理を作るには時間不足でした。 午後からちょっと作業してみたら、小さい足裏でも個々のモーションはどれも動きました。 んー…遅刻しなければ予選に参加できてたのに… うう…ふがいないマスターでごめんね。ゴーレムくん。 あいかわらず棄権で申し訳ありません > 応援してくれている方々 ☆[コメント] | |
| 2005/09/16 X-0 | |
|
★ 22:57
X-11h 横歩き成功(ただし第7回規定の足裏)
できました。 ちょっとバランスが微妙だけど… これから足裏サイズを変更して、その後出発です。 足裏サイズ変更後のモーションチェックと「自分で倒れる」は明日の朝、現地調整。 「実家に寄って仮眠してから現地へ…」と思っていたけど時間が無さそうな… ☆[コメント] | |
|
★ 12:55
X-21h 進捗状況 (残りは横歩きモーション、足裏サイズ変更、スイッチ処理)
結局足裏サイズ変更作業はできないままに出社。 (来週一週間休むので今日はお休みにしなかった) 残り作業一覧(☆印は必須&未完、◯は完了)
先月(8/5時点の進捗)に比べたらかなり進んでる。 でも、足裏サイズを変更したときそのままのモーションで動くかどうか… あと、今回もセンサー系は間に合わなそう。予選デモは転んだら終わりです。 …というよりも転ぶと PIC が暴走(?)したり、L-Cardにリセットがかかったりするので起き上がれなさそう。 転倒時にサーボが過負荷状態になって電圧降下してるんだと思う。 近藤科学のブースター7(中身はキャパシタ+レギュレータ?)を付けているけど容量不足みたい。 あ、無線モジュールをまだ取り付けてないや… 本戦に出られないとしても付けておかないとまずいよね。 頭部が50gくらい重くなっちゃうな。 ☆[コメント] | |
|
★ 5:41
X-28h ひざ曲げ歩き成功!
仮眠したんじゃなかったんですかっ! 足踏みモーションに左右の脚の振り+上半身の前後振子を追加して、力強い歩行ができるようになりました。 やったねっ! (*'-')b 今度こそ仮眠します。 起きてから足裏サイズを第八回規定に合わせる作業。 ☆[コメント] | |
|
★ 3:28
X-30h ひざ曲げ足踏み成功
ひざを伸ばした足踏みスクリプトを参考にして、ひざを曲げた足踏みを作成。 軸足側のひざに補正をかけて、足踏み周期を調整したら身体を前後に揺らすことなく足踏みできるようになりました。 これから前進と横歩きの作成。 …って一度仮眠したほうがいいかも。 足裏サイズの変更はいつやろうか… ☆[コメント] | |
| 2005/09/15 X-1 | |
|
★ 13:09
逆運動学(?)計算 by Ruby
ようやく Ruby でのプログラミング方法がわかってきた気がします。 全部ベタで書いていたのを少しずつクラスに書き換え中 …って、そんなことをやっている場合じゃないのですが… 「足裏が地面&前後方向の軸に平行(直立時と同じ向き)」という条件下での脚の関節角度計算プログラムが完成しそうです。 これでひざを伸ばした歩行モーションを一気に書き換えられる…かな。 でもでも、足裏サイズが第七回の規定のままなのでした。 今日、歩行できるようになったら切らなきゃ。 あと、会社帰りに旅行バック or キャリーバックの調達も必要。 ヨドバシに革製のキャリーバックがあってかわいかったんだけど… 外側にポケットとかなくて使い勝手はいまいちっぽかった。 (ローゼンメイデンに出てくるような鞄にキャスターがついてるの) ☆[コメント] | |
|
★ 3:18
足踏みモーションは大丈夫っぽい
7/18に作った足踏みモーション (7/16の足踏みモーションの修正版)はちゃんと動くみたい。 (上体を前後に揺らすのは相変わらずだけど) これをひざを軽く曲げた足踏みに作り替えて再構築…かな これで残る作業時間は今日の夜だけとなりました。 名刺やエントリーナンバーを作っている暇はなさそう。 SISOさんごめんなさい。 ☆[コメント] | |
|
★ 0:26
Vectorクラス…
| |
|
★ 0:02
Ruby って…
コンストラクタのオーバーロード(多重定義)って無いんですね。 (というよりもメソッドのオーバーロードが無い?) コンストラクタで引数の数や型を自分でチェックしろと… し、知らなかった… orz 参考) ruby-list:4228 |あと、rubyではコンストラクタの引数の数によって挙動を --- …というか Ruby で逆運動学計算プログラム作ってる場合じゃないでしょーーー!! ええ、ゴーレムくんはまだ起き上がりしかできませんよ。 ☆[コメント] | |
| 2005/09/12 X-4 | |
|
★ 18:57
動画が見られないの…(泣
「Linuxをデスクトップに使ってるあんたが悪い!」というツッコミは置いといて… 拡張子 wmv なファイルで xine で見られるものと見られないものが… ffmpeg -i で codec を調べてみると、 見られるものは Video: wmv2、見られないものは Video: WMV3 具体例をあげると、吉村さんとこと三月兎さんとこの動画は見られるのに、菅原さんとこの動画が見られない…(泣 動画を触れるような Windows環境がないので判らないのだけど、この違いは動画編集ソフトに依存するのかな… win32codecs-essential-20040809 は入れてるのだけどこれだけじゃ足りない? --- 2005.09.12 22:13 追記 teltelさんのコメントを参考に、MPlayerのcodecアーカイブの最新版を持ってきたら見られるようになりました。 WMV3 は Windows Media Player 9 のコーデックみたいですね。 ちなみに最新版は ftp://ftp2.mplayerhq.hu/MPlayer/releases/codecs/ の all-20050412.tar.bz2 だと思います。 ☆[コメント] | |
| 2005/09/10 X-6 | |
|
★ 23:52
秋葉のイタトマ撤退?
今日、秋葉へ行ったとき、秋月、千石の通りに車を駐めたのだけど… イタリアントマトの看板(入口の上のとこの)が無くなってた。 ビルのテナント看板(?)も1F部分は空白になってたし… もしかして撤退しちゃった? ☆[コメント] | |
|
★ 23:48
横歩きを王様にチェックしてもらいに
ロボット王国へ行きました。 午後7時55分に… (大迷惑 閉店後30分も相手をして頂いてありがとうございました。 > 王様 結論から言うと… 歩けません! 正確には、 うまくいくときはちゃんと足をあげて移動できるけど、ダメなときは送り足を着いた後、または引き足を持ち上げる時に転ぶ。 やっぱり直立姿勢が安定しないのが問題みたい。 角度センサーを載せて、ちゃんと直立するまで間をおくようにすればなんとかなる…かも。 王様の助言は 「ひざを軽く曲げたほうが安定するのでは」 「上体のバランスは腰よりも腕でとったほうがいいかも」 でした。 でもでも、それじゃぁ目指してる方向と違うーーーーー(泣 なんてことは参加資格審査を通過してから言いなさい > 私 前進モーションもうまくいかない(後退しちゃう…なぜ)ようになっていたので、明日はモーション作成頑張らねば… ☆[コメント] | |
|
★ 23:37
先週末のお買物&もらいもの
| |
| 2005/09/09 X-8 | |
|
★ 1:01
バグ修正完了
結局、原因はMSC(PIC側サーボ制御信号生成プログラム)のパルス生成処理。 同じポートの出力ピンに繋いだサーボのパルス幅の差が 30μsec の時にパルス生成(というよりもパルスの立ち下げ)に失敗していました。 シリアル通信データの到着タイミングとの兼ね合いでうまくいったり、失敗したりという状況だったので、これまで見つからなかったみたい。 差が 10μsec, 20μsec の時は通信データを無視するようなロジックになっていたので、30μsec の場合も無視するように変更して不具合解消。 今度こそ大丈夫…と思いたい。 ☆[コメント] | |
| 2005/09/08 X-9 | |
|
★ 17:58
(URLメモ)USBカメラをLinuxで使う
吉村さんや他の人のページを見ていると、「撮影したビデオをスロー再生して動作チェック」という話が出てる。 ゴーレムくん開発もそろそろそういう時期かな。 ということで、Linuxで使えるUSBカメラがあるといいんだけど… 「Linux USBカメラ Video キャプチャ」でGoogleして見付けた 「永江研究室」の「Video for Linux, Open Sound System, Gtk, Xlib,...」によると、QV-4000, QV-700Nが使えるみたい。 …と思ったら、ドライバ開発停止って… でもでも「LinuxとWebカメラ - Ryutaroh」から辿れる「pwcドライバのページ」を見ると、最新パッチも出てるみたい。 んー、開発者違うのかな? 「LinuxとWebカメラ - Ryutaroh」によると
あたりが使えそう。 --- カウントダウンが変かも…残りは 8日と15時間 (いつから切り上げ表示に変えちゃったんだろう…) ☆[コメント] | |
|
★ 1:16
こんな時期にバグがーーー
横歩きモーションを後回しにして、屈伸をさせていたらなんか挙動が変。 腰ピッチ軸の角度によって、股関節ヨー軸と腰ロールのパルスが出なくなっちゃう。 どうも各サーボのパルス幅の順序が逆転するところで起きてるような感じ。 MSP(L-Card側)のパルス幅ソートか、それともMSC(PIC側)のパルス生成かどっちかに原因があると思うんだけど… …というか、今ごろになって発覚しないで… (泣 ☆[コメント] | |
| 2005/09/07 X-10 | |
|
★ 3:52
正弦定理と余弦定理
昨晩、色々考えて解いた「脚の関節角度を求める式」ですが… ついさっき「正弦定理」と「余弦定理」の存在を思い出しました。 で、見直してみると、式1 は正弦定理の変形、式3 は余弦定理の変形なだけ… 式4 に至っては、余弦定理で解いたほうが楽… こ、こんなことで時間を無駄にするなんて… orz 参考: 関西学院高等部 数学I 正弦余弦の融合定理 Google検索「正弦定理 余弦定理」 ☆[コメント] | |
|
★ 0:29
片足を持ち上げるときのバランス
「今ごろ気付くなよ」とツッコミが入りそうですが… 足裏を鉛直方向に持ち上げるから片足全体の重心が身体の前側に移動して前に倒れるのね。 …ということは、片足全体の重心が鉛直方向に移動するように動かす? (だんだん難しくなってきた…) ☆[コメント] | |
| 2005/09/06 X-11 | |
|
★ 23:46
脚の関節角度を求める式 (その2)
深夜に書いた式は、括弧の数が間違ってました… (汗 Rubyで計算する場合の 式3'、式4' で、それぞれ開き括弧、閉括弧が不足。(修正済) 現在、L35の長さを入力すると J3,J4,J5 を返すプログラムを Rubyで作成中です。 実際に作ってみると、計算中はずっとラジアンにしておいて、最後に度に戻すほうが楽だね。 今のところ L35=147.0 : J3= 0.0 J4= 0.0 J5= 0.0 L35=146.0 : J3= 7.1 J4= 13.4 J5= 6.3 L35=145.0 : J3= 10.1 J4= 19.0 J5= 8.9 L35=144.0 : J3= 12.3 J4= 23.2 J5= 10.9 L35=143.0 : J3= 14.3 J4= 26.8 J5= 12.6 L35=142.0 : J3= 16.0 J4= 30.0 J5= 14.1 L35=137.0 : J3= 22.7 J4= 42.6 J5= 19.9 L35=132.0 : J3= 27.9 J4= 52.3 J5= 24.4 L35=127.0 : J3= 32.3 J4= 60.6 J5= 28.3 な感じ。 ☆[コメント] | |
|
★ 2:06
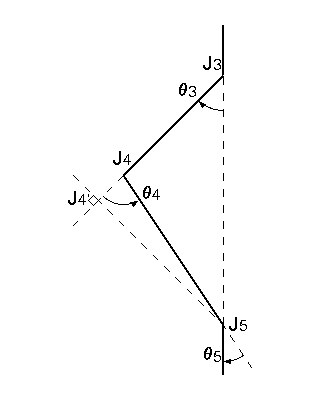
脚の関節角度を求める式
もう一度原点に戻って、脚の関節角度を求める式へ。 2004.02.26の日記に書いた式を、股関節と足首の距離から関節角度を求める式に変換。 (めちゃめちゃ遠回りしてるけど数学思い出さないと先に進めそうにないです) (参考資料:Wikipedia「三角関数」)
図から
θ4 = θ3 + θ5
L34 * sinθ3 = L45 * sinθ5
(θ4の回転方向が逆だが符号は気にしないことにする)
式1)
∴ θ4 = θ3 + asin( sin(θ3) * L34 / L45 )
また、L34を延長し、∠J3,J4',J5が直角をなす点 J4'を仮定すると
L35^2 = L34'^2 + L4'5^2
L44' = L45 * cosθ4
L4'5 = L45 * sinθ4
式2)
∴ L35^2 = ( L34 + L45 * cosθ4 )^2 + ( L45 * sinθ4 )^2
これをJ4に対する式に変換する
右辺第1項を展開すると
L35^2 = L34^2 + 2 * (L34 * L45 * cosθ4) + (L45 * cosθ4)^2 + (L45 * sinθ4)^2
= L34^2 + 2 * (L34 * L45 * cosθ4) + L45^2 ∵ cosθ^2 + sinθ^2 = 1
左辺がθ4 になるように変換すると
2*(L34*L45*cosθ4) = L35^2 - L34^2 - L45^2
cosθ4 = ( L35^2 - L34^2 - L45^2 )/(2 * L34 * L45)
式3)
θ4 = acos ( ( L35^2 - L34^2 - L45^2 )/( 2 * L34 * L45) )
さらにθ4の値からθ3を求めるため
θ4 = θ3 + asin(sinθ3 * L34/L45)
をθ3を左辺とした式に変換する。
sin(θ4-θ3) = sinθ3 * L34/L45
加法定理より
( sinθ4 * cosθ3 - cosθ4 * sinθ3 ) = sinθ3 * L34/L45
両辺をsinθ3で割ると
sinθ4/tanθ3 - cosθ4 = L34/L45
sinθ4/tanθ3 = L34/L45 + cosθ4
tanθ3 = sinθ4/(L34/L45 + cosθ4)
式4)
θ3 = atan( sinθ4 / (L34/L45 + cosθ4) )
Ruby で計算する場合 (Jx は θx のDegree値を持つ変数とする)
式1')
J4 = J3 + Math.asin(Math.sin(J3 * Math::PI/180) * L34/L45 ) / Math::PI*180
式2')
L35 = Math.hypot( L34 + L45 * Math.cos( J4 * Math::PI/180 ),
L45 * Math.sin( J4 * Math::PI/180 ) )
※) Math.hypot(x,y) は sqrt(x*x, y*y) を返すモジュール関数
式3')
J4 = Math.acos( ( L35**2 - L34**2 - L45**2 ) / ( 2 * L34 * L45) ) / Math::PI*180
式4')
J3 = Math.atan( Math.sin(J4 * Math::PI/180)
/ (L34/L45 + Math.cos(J4 * Math::PI/180)) ) / Math::PI*180
ServoCreationのDXFデータからサイズを拾うと
L34 = 39.0 mm + 30.0 mm = 69.0 mm
L45 = 39.0 mm + 39.0 mm = 78.0 mm
腰と足首を同一平面上にする J3,J4,J5 を求める式
J5 = Math.asin(Math.sin(J3 * Math::PI/180) * L34/L45 ) / Math::PI*180
J4 = J3 + J5
L35が与えられたとき、J3,J4,J5 を求める式
J4 = Math.acos( ( L35**2 - 10845.0 ) / 10764.0 ) / Math::PI*180
J3 = Math.atan( Math.sin(J4 * Math::PI/180)
/ (L34/L45 + Math.cos(J4 * Math::PI/180)) ) / Math::PI*180
J5 = J4 - J3
これで関節角を計算で求められる…かな。 (「ロール軸とヨー軸を無視すれば」だけどね) ☆[コメント] | |
| 2005/09/05 X-12 | |
|
★ 16:47
アンテナの設定は第八回大会終了まで凍結
「そんなことやってる場合じゃないでしょー」という脳内ツッコミを受けつつも、ついついアンテナのプログラムを触ってしまう大会二週間前。 こんなことではいけないので、大会終了まではアンテナの設定を凍結します。 エラーになろうが、更新チェック時刻がずれようが、プログラムにバグが見つかろうが、放置することにします。 御利用のみなさまには御迷惑をおかけしますが、御理解くださいますようお願いいたします。 ☆[コメント] | |
|
★ 1:50
横歩き…
相変わらず2回に1回くらい転びます。 どうも足を着くときに足裏が水平になってない感じ。 原点に帰って「足踏み」から調整しろってことかな… あと、ひざ関節のガタは相変わらず。 昨日の飲み会で「アルミホーンはモノによってガタが大きい」という話を聞いたので、ローハイトホーンと交換してみます。 ☆[コメント] | |
| 2005/09/04 X-13 | |
|
★ 1:25
帰宅しましたー
「ロボットだらけの水泳大会」から帰宅しました。 結局今回も最終電車を逃して川崎駅からタクシー。 0:01秋葉原発の電車だともう少し近くまで帰れるみたい。 (それでもタクシーだけど) 皆いろんなことを考えてるんですねぇ… とても参考になりました。 ぴしいさんへ: 日記にコメントするときは↓の[コメント]をクリックして、 次の画面で右上にある[返信する]というボタンを押して下さい。 他人のコメントにコメントを付けたい場合は、左の「最近のコメント」で、コメントを選んで、表示される画面で[これに対して返事を書く]というリンクをクリックして下さい。 ☆[コメント] | |
| 2005/09/02 X-14 | |
|
★ 15:12
エントリーNo.を貼ろう運動
 | |
|
★ 2:46
横歩き…できそうな…
横歩きって…一歩が何cmくらいあればいいんだろう… 3cm くらいずつなら動けそうな感じだけど… まだ、2回に1回は転んじゃう。 引き脚(?)を戻す時の重心移動が難しいです。 でも、あと、もうちょっと…かな。 今日はこれで寝ます。 ☆[コメント] | |
| 2005/09/01 X-15 | |
|
★ 18:50
「長月」 夜風が涼しくなりました
| |
| 2005/08/31 X-16 | |
|
★ 19:55
進捗 & 資料室変更 & PRS-3401の特性(その2)
せっかく一日複数エントリ可能なんだから別々に書きなさいよ… ☆進捗:すこぶる不調 横歩き作成の前に、もう少し足を高くあげるように足踏みを調整しようとしたら全然うまくいかない…。 徐々に右を向いてしまうのは直ったけど、上半身が前後に揺れて最後は後に倒れちゃう。 …まぁ、5歩くらいなら倒れないからこのまま作業を進めようかな。 ☆「資料室」変更 技術資料をちゃんとまとめたいので、Hiki(Rubyで動くWikiエンジン)を導入してみました。 飽きたらまた変えちゃうかも。 (リンク切れになるからやめなさいっ) ☆PRS-3401の特性(その2) 一昨日の日記で「KOのサーボの倍の角度動く」と書いたけど、記憶間違い。 SISOさんの指摘(「SISO-LAB」の2005/08/30)によると コントロール信号は 1500±600μsec で ±90度回転 なので、KOサーボの 1.5倍の角度動くようです。 ☆[コメント] | |
| 2005/08/29 X-18 | |
|
★ 13:10
(URLメモ)PRS-3401の特性
SISOさんとこ の掲示板から [1404] PRS-3401の脱力について 投稿者:C:olonたんの中の人(技)さん ふむふむ φ(. .*) メモメモ 多分、PRS-321も同じなんでしょうね。 あと、誰かのページに入力信号のPWMピーク幅が書いてありました。(URL失念) たしか近藤科学のサーボと比べてピーク幅の可変域が半分だったはず。 (同じPWMピーク幅を入力すると PRS-3401はKOサーボの倍の角度動く) サーボ制御基板の改良が必要になる予感。 --- え?進捗ですか…えーっと… 脚サーボの原点を再調整して直進できそうな感じになりました。 横歩きは今日の夜に頑張ってみます。 (土日は友達が遊びに来ていたので作業しなかったです) ☆[コメント] | |
| 2005/08/26 X-21 | |
|
★ 11:28
(URLメモ)アルミ加工のノウハウ
最近ブラウザの異常終了が多くて、見ていたページを忘れるのでメモ
他にも一杯見かけた気がする… Wikiを動かしてそこにまとめた方がいいかも。 ☆[コメント] | |
| 2005/08/25 X-22 | |
|
★ 22:28
今日のお買物 (ローゼンメイデン 5)
ファンデーションの替えを買うために帰宅途中で丸井へ。 その後、本屋に寄ったらレジの横に見たことあるような絵が… …って、ローゼンメイデンの5巻でした。 まだ途中までしか読んでいないのだけど、水銀燈さまが可愛かったです。 やっぱり水銀燈さまをモデルにしようかなぁ… --- なんてやってるうちにあと3週間。 ゴーレムくんは往復パンチを出せるようになったけど、あいかわらず横歩きができてない。 ☆[コメント] | |
| 2005/08/23 X-24 | |
|
★ 23:44
今日のお買物 (ロボコンマガジン)
リンク先は オーム社

とんでもないどしゃ降りの中、帰宅途中で思いついて本屋へ。 (車だから濡れないし) 買ったのは
「制御をはじめよう!ロボットを上手に動かすために」 が今回で最終回。 むー、なんか中途半端だなぁ…面白かったのに。 (でも、難しい話を端折りながら書いてあるので落ちこぼれ気味) 最終回はZMPとコンプライアンス制御の話でした。 ☆[コメント] | |
|
★ 16:00
やっぱり人形系だよね
/.j の日記を読んでいる人向け。 (ROBO-ONE参加者はほとんどが知ってるでしょう) 巫女さんロボ「アマテラス」の初舞台の動画が、「ROBO-ONE観戦記 Robot-fan」の「今週のSpotロボット」に公開されています。 華奢な胴体に巫女衣装が似合ってます。 おみくじ箱を振る姿がかわいくてかわいくて… 作るならやっぱり人形系だよね。うん。 そのためにもあと1ヶ月頑張ろう。 ☆[コメント] | |
| 2005/08/22 X-25 | |
|
★ 12:56
手を使った攻撃
| |
| 2005/08/20 X-27 | |
|
★ 22:04
Treva落札
| |
|
★ 19:33
エントリー No. 0117
| |
|
★ 17:25
エントリーシート送付
さっき、参加申込書をメールしました。 もう7回目のエントリーです。(Special,Trial除く) 今度こそゴーレムくんを予選のリングに立たせてあげたい。 (第9回大会は Golem III になるでしょう。多分) --- 第8回ROBO-ONE参加者名簿は毎日のように更新されてますね。 お疲れさまです > 事務局の方。 アンテナの「第7回、第8回参加者版」もどんどん肥大化しています。 そろそろ、マージしなきゃ。 --- 昨日のガンダムはばっちり三作とも録画できました。 (I と II は録画しながら観てた) ☆[コメント] | |
| 2005/08/19 X-28 | |
|
★
(録画メモ)本日19:30〜 NHK BS2 ファーストガンダム劇場版一挙放映
ごめん。もっと早くに書けば良かったかも… NHK BS2 マンガ夜話 の夏休み特番第二弾 8/19 まるごと機動戦士ガンダム!! 夏休み特番#2 BSアニメ夜話スペシャル「まるごと!機動戦士ガンダム」 ヲタクな馬鹿話(ぉ を挟んで映画を放送するので、ガンダムIの放送は 20:30からです。 タイムテーブルはリンク先をどうぞ。 LDで三作とも持っているのだけど、再生環境が無くなって悲しかったのだけど、これでいつでもみられるようになるかな。 オリジナル音声なのでDVD版と合成すればオリジナル版DVDが作れるような気も… ☆[コメント] | |
| 2005/08/17 X-30 | |
|
★
CMOSイメージセンサ (その3)
CMOSイメージセンサ (その2) で書いた C328-7640 JPEG Compression VGA Camera Module Webページには RS-232: 115.2K bps for transferring JPEG still pictures or 160x128 preview @8bpp with 0.75~6 fps と書かれていて、「6fpsっていいなー」とか思っていたのですが… 良く考えたら 115.2K bps でそんなフレームレートのデータ転送できないってば。 (IRCでespyさんが指摘) 160 * 128 * 8 bit / ( 115.2K bitpersec * 8 / 10 ) = 163840 bit / 92160 bps = 1.78 sec うーん… 6fps ってどっから出てきた数字なんでしょ。 Data sheet(PDF) には載ってるけど User Manual(PDF)には載ってない。 解像度と色数を最低の 80x64 4bit gray にすると 1/8 だから 0.22 sec。 5fps にちょっと足りないくらい… やっぱり Treva + 画像処理用マイコンかしら。 NEWLIGHTさんから1つ譲っていただけることになったので、あと2つくらいヤフオクで調達しよっと。 …と書きつつ実はさっきセリ負けたばかりだったり… --- 2005.08.18 00:11 修正 Data sheet には 6fps って載ってました。 ☆[コメント] | |
| 2005/08/15 X-32 | |
|
★
高山の宿を予約 (ワシントンホテルプラザ)
みんなと一緒のところが楽しそう…と思ったけど、決めてしまいました。 ごめんね > いしかわさん 公式ページからリンクされてる宿泊予約サイトから 17日と18日の二泊。同じ宿の方はよろしくです。 でも、実はホテルのWebページで直接予約するほうが安い… 高速バスやレンタカーとセットだと安くなるのかな。 あ、まだエントリーしてません。 (事前審査モーション作ってから…) ☆[コメント] | |
|
★
今日のお買物 (ROBO-ONE公式ガイド、憲法を変えて…)
熱っぽかったので早引け。 帰りに栄養ドリンク買い込むためにデパートに寄り道。 ついでに本屋でお買物。 買ったのは (リンク先はそれぞれの出版社のページです) 公式ガイドは平積みになってると思ったら目の高さより上の棚に立ててありました。背表紙しか見えなかったので見つけるのに15分ほど探し回りました。 「憲法を変えて…」は日経新聞の広告で見つけて欲しかったとこだったので、ちょうど良かった。 もっと厚い本かと思ってたらペラペラの本でした。 読みやすくてちょうどいいかな。 と日記に書いたところで頭がいたくなってきたのでもう寝ます。 ☆[コメント] | |
| 2005/08/11 X-36 | |
|
★
エントリー〆切まであと9日
エントリーまでには事前審査モーション仕上げたいね。 足裏は第7回規定のままでもいいから。 実家から高山までのルートを調べてみたら、高速道路を100kmちょっと走れば着くことが判明。 三日分の着替え+ゴーレムくん+作業環境を持って電車の乗り換えするのは大変なので、現地には車で行くことにします。 1日目と最終日はどっかの駐車場かなぁ… 宿泊先に置けるといいんだけど。 ☆[コメント] | |
|
★
CMOSイメージセンサ (その2)
昨日の日記に書いたデバイスは、どれもセンサ単体でレンズすら付いてないんですね…残念。 (「image sensor LENS」で検索するとレンズ付きモジュールが見つかるけど、インターフェースの問題はそのまま) 日記へのコメントとトラ技2005年2月号の記事とメカトロ仙術BBSの1998、2001のスレッド を参考にした結果、 Treva と C328-7640 JPEG Compression VGA Camera Module を調達しようと思います。 L-Cardで試してみて、カメラとPICの両方の制御が追い付かないようなら、gumstix を導入しようかな。 robostix っていうATmega128を載せた拡張カードも出てるみたいだし。 ああ、また脇道に逸れそう… (笑 ☆[コメント] | |
| 2005/08/10 X-37 | |
|
★
CMOSイメージセンサ
作業の優先順位決めたその日に脇道に逸れる私 (汗 控え室でJinさんに聞いた CMOSカメラユニットの入手方法…それは 「Digi-KeyからCMOSイメージセンサモジュールを調達する」 早速、日本語ページで「CMOS イメージセンサ」 と入力して検索。 …一件も見つからない。 そういえばJinさんは英語(仏語?)の国の人でした。 英語ページで 「CMOS image sensor」を検索すると、 STMicroelectronics の VS6502 と VS6552、Eastman Kodak の KAC-9630 が見つかります。 Jinさんは3社見つかると言ってた気がするんだけど… で、それぞれのデータシートをざっと見た感想 STMicroelectronics のは VS6502 が I2C制御で4ビットパラレル出力。 VS6552 は STV0974 というDSPと 組み合わせて、I2C制御の8ビットJPEG出力として動かすみたい。 コダックのKAC-9630は良く判りません。 I2C制御の8ビットパラレル出力みたいだけど… シャッターの制御までやらなきゃいけないのかな… それとも「シャッターの制御もやろうと思えばできるよ」 という意味なんでしょうか… 残念ながら、どちらも私が手を出せるレベルではないみたい。 「VS6502なら何とか…」という気もするんだけど。 やっぱりヤフオクで Treva を調達かな… でも、最近品薄で価格高騰してる… ☆[コメント] | |
| 2005/08/09 X-38 | |
|
★
第8回大会に向けて
第8回大会こそは事前審査を通過して予選に出なくては… 必要な作業を優先順位順に並べると
残りは優先順位不定
あとは SISOさん提案の「エントリーナンバー付けましょー運動」 三月兎さん提案の「参加者は名札つけましょー運動」に賛同して
あと1ヶ月でどこまでやれるかな… あ、8/20までにエントリーするのを忘れないように。 ブラケットの変更とか軽量化とかをしている暇は無さそうです。 --- 2005.08.10 修正 「エントリーナンバー付けましょー運動」の提案者は SISOさんでした。 ☆[コメント] | |
| 2005/08/08 X+1 | |
|
★
今回の反省点ともらいもの
| |
| 2005/08/07 X-Day | |
|
★
X+1h き、棄権します… orz
正確には受け付け〆切まであと 20分ですが… まだ自宅にいます。 &事前審査モーションできてません。 棄権確定… 期待させてしまった皆様ごめんなさい。 今からゴーレムくんを連れて会場に向かいます。 ☆[コメント] | |
|
★
X-5h 作業メモ(コネクタの配線)
3.3V系コネクタ 1: +3.3V 2: GND 3: GPIO12 4: GPIO13 5: ADIN0 6: ADIN1 5V系コネクタ 1: +5V 2: GPIO0 3: GPIO1 4: GPIO2 内部配線 緑: GPIO12 青: GPIO13 紫: GPIO14 (未使用) 灰: GPIO15 (未使用) 緑: ADIN0 灰: ADIN1 白: GPIO0 桃: GPIO1 水: GPIO2 --- だめ…時間がない… 加速度センサもデジタルコンパスも諦めよう スタートボタンだけ作って後は運に任せる方向で… ☆[コメント] | |
|
★
X-6h 進捗(GPIO読み込み成功)
これでスタートスイッチが実装できます。 あと6時間しかないけど大きな前進。 まだブレッドボード上だけど… 次はAD変換入力への加速度センサーの値の読み込みテスト。 --- 現在、予定よりも10時間遅れ。 (予定では 19時にセンサー処理実装完了、24時モーション作成完了) 基板に実装されてない素のADXLに足を付けようなんて思ったのが間違い。 これで3時間とかなりの集中力を失いました。 ☆[コメント] | |
| 2005/08/05 X-1 | |
|
★
X-1d11h 進捗状況
| |
|
★
X-1d12h つ…疲れた…
どうして大会直前に仕事が忙しくなるのかなぁ… それは… 大会翌日に倒れてもいいように仕事を前倒しにするからですね。 疲れて目眩いがするのでさっさと寝ます。 …明日一日でなんとかなるんだろうか… ☆[コメント] | |
| 2005/08/04 X-2 | |
|
★
(メモ)L-Card用 GPIOドライバの注意点
成松さん作成の L-Card用GPIOドライバを使う上での注意点
拡張ボードから配線取らないとGPIO使えない… ということは、友達から借りたL-Card+16じゃテストできないのね。 ☆[コメント] | |
| 2005/08/03 X-3 | |
|
★
回路考えてるだけで終わっちゃった…
早めに帰宅したのに… (途中お買物したけど) スイッチとセンサー回りの回路考えてたらこんな時間。 必要なのは
ジャイロは間に合わないのであきらめ。 今日の夜にはブレッドボードでテストしないと ☆[コメント] | |
| 2005/08/02 X-4 | |
|
★
起き上がりできたーー!!
昨日作ったスクリプトをわくわくしながら実行してみたら、3回に1回くらいしか成功しない… 「なんでーーー」 と嘆きつつ、腕を利用するように調整したら確実に起きれるようになりました。 動画: あとは、うつぶせ→あおむけ→とんび座り→起き上がり→直立 の流れを作ればできあがり…かな。 モーション作成は一時おやすみにして、明日からはスイッチと加速度センサーの取り付け。 --- え?うつぶせに転んだらどうするのかって? そのときは諦めるしかありません。 ☆[コメント] | |
| 2005/08/01 X-5 | |
|
★
起き上がり…できた…かな?
| |
|
★
「葉月」 暑中見舞申し上げます
梅雨っぽくなかった7月はあっという間に過ぎて、真っ青な夏空がやってきました。 毎朝、日差しの暑さと蝉の声に負けて目が覚める今日この頃、夏バテなどしないように頑張りましょう。 ああ…今年も海へ泳ぎにはいけそうにない… ROBO-ONE Specialの翌日に休んで行こうかな… 8月8日だとクラゲさんは出てくるんだろうか。 ☆[コメント] | |





| 2005/07/30 X-7 | |
|
★
逃げちゃダメだ逃げちゃダメだ…
せっかくの休日だというのに本を読んでだらだらと過ごしてしまいました。 なんで納期が近付くとそうなんですか、あなたは… もうちょっと頑張れば手が届きそうなんでしょ? なんでそこで気を抜いちゃうの… …なぜなんでしょう… 気を抜いてるわけじゃないけど、なぜか手を付けられなくなる。 何が怖いのかわからないんだけど前に進めない。 まぁ、今回は放り出さずに続いているだけでもすごいんだけど… あ…納期がいつまでも延びるから続けられるだけなのかな。 --- 「60cmならいろいろなものが(勇気を出せば)手に入ることを知る」 という、ひとりごとが某地下研究室から聞こえました。 人形師を目指す人は意外と多いのかも。 ☆[コメント] | |
| 2005/07/27 X-10 | |
|
★
KRS-2350 投入?
色々考えたけど「トンビ座り」からの起き上がりの方向で。 (結局、自分がやっている方法以外のモーションを組めそうにない) まだ起き上がれていないけど、テストでは股関節ヨー軸サーボに負荷がかかるので、ノーマルPDS-2144には荷が重そうな感じ。 ハイパワーギヤに交換するか、KRS-2350に載せ替えるか…どうしようかな… とりあえずKRS-2350のボトムケースを交換したものを2つ作成。 でも、信号オフ時の電磁ブレーキが邪魔になりそう。 パターンカットとかで回避できないのかな… (ボトムケース交換時に基板を見たけど全然わからず) --- 2005.07.27 12:20 修正 PRS-2144 じゃなくて PDS-2144 でした。 ☆[コメント] | |
| 2005/07/26 X-11 | |
|
★
右肩が…
270度回るようになりました。身体柔らかいねぇ… …とか言ってる場合じゃありませんっ! アッパーケースのストッパーが削れちゃったかな… (T-T 2346REDが死なないことを祈ります。 --- 起き上がりはまだ遠いようです。 上半身を持ち上げた後が続かない。 腕先におもり付けたら反動で起こせないかな… (ぉぃ --- ちなみに肩のサーボは PDS-2174(2144のアナログ版) ☆[コメント] | |
| 2005/07/24 X-13 | |
|
★
扇風機
 汎用人型扇風機 クリックで動画ダウンロード 暑くなってきたので扇風機を導入しました。 人型扇風機ってちょっと贅沢かも… 動画(850Kbyte:MPEG1,900Kbps) モーター音が静かだったら寝るときに扇いでもらうのに… --- そんなことやってないで起き上がりの練習しなよっ! ☆[コメント] | |
| 2005/07/23 X-14 | |
|
★
地震
これまで体験した地震のなかで最大の揺れ… 揺れ始めは 16:35:05 くらい @ 川崎市北部 --- 2005.07.23 16:57 追記 余震が何度もきてるらしいけど、身体が震えててわかりません…(汗 --- 2005.07.23 17:26 追記 震度5弱だったようです。 でも本棚が倒れるなどの被害もなく無事です。 (平積みした本の山も倒壊しなかったし) ☆[コメント] | |
| 2005/07/21 X-16 | |
|
★
Dash にエントリー & 起き上がり練習
| |
| 2005/07/19 X-18 | |
|
★
弐号機アンビリカルケーブル切断!
「残り稼働時間2分ですっ!」 …ってゴーレムくんはバッテリー並列になってないから即停止だってば。 直進歩行させるべく深夜に頑張っていたら突然暴れだしてパッタリ動かなくなりました。 本体側コネクタを測定すると電圧ゼロ。 ???定電圧電源死亡?? と思ってテスターあててみると端子には電気がきてる。 コネクタ手前で小さな三端子コネクタに分岐させているところで断線してました。 モーションデータをPC側で作ってて良かった… 直進できないのは右足の股、ひざのサーボのガタ(2度くらい)が原因みたいです。 ガタの原因がサーボ自身なのか、アルミホーンのセレーション削れなのかは今夜の調査項目。 ☆[コメント] | |
| 2005/07/18 X-19 | |
|
★
本の整理
Jin Satoさんを見習って、お部屋に溢れる本を一気に整理することに。 基本方針は「ロボ関連以外のコンピュータ雑誌は全て廃棄」 UNIX USER、日経Linux、Linux magazine、Java World、Software Design と古くなった技術書が整理対象になりました。 「ロボコンマガジンも広告ページを削ったら薄くなるかなー」と思ったけど面倒なので放置。 キッチンにあった段ボール箱3つが無くなって、本棚にもちょっと余裕ができました。 半日で終わると思ってたのに夜までかかっちゃった。 今日は進捗ゼロかな… ☆[コメント] | |
|
★
関東地方梅雨明け
WindVoiceさんの日記 から「空の写真」を見たら真っ青な空 で、外を見てみたら真夏の空が! (起きて外見てなかったのかっ!) 「もしかして梅雨明け?」と思ってニュースサイトを見たら 梅雨明け:関東甲信、近畿、中国、東海の各地方で (毎日新聞) でした。 あーーでも、天気の良い日が続くと開発ペース落ちちゃうなー ☆[コメント] | |
| 2005/07/16 X-21 | |
|
★
歩いたー!
昨日の日記 に書いた左右のバランスを再調整して定位置での足踏みに成功。(徐々に右を向いちゃうけど) 足の踏み出しを加えてついに歩けるようになりました。 (これを早朝にやってたから大阪行けなくなったという…) まだ歩幅も足上げも少ないけど「歩いた」ということにしたいです。 前後方向の振子動作を組みこめばもっと綺麗に歩けるはず。 足踏動画(2Mbyte,MPEG1) 歩行動画(1.5Mbyte,MPEG1) 頼りない歩行だけどゴーレムくんと私にとっては大きな前進 ☆[コメント] | |
|
★
RoboCup観戦とりやめ
なんとか足踏みまでできるようになったので、 開発お休みして RoboCup 2005 大阪 を観に行こうと思っていたのですが… 朝まで歩行モーションを試していたら寝坊してしまいました。 今から出かけて日曜日だけ観るのももったいないので、連休中は開発に専念します。 ICタグも申し込んであったのになー 結局、9年前(?)に名古屋でやった第一回大会しか観てないです。 次のジャパンオープンは観に行きたいな… …と思ったら来年は北九州なのね… (さらに遠い) ☆[コメント] | |
| 2005/07/15 X-22 | |
|
★
昨日のお買物 (トランジスタ技術、星界の断章I)
☆[コメント] | |
|
★
足踏み成功!
なんとか足踏みできるようになりました。 動画(1.2Mbyte:MPEG1,800Kbps) 右側股関節サーボがへたっているのか、左右同じスクリプトではダメでした。 そのせいもあって足踏みなのに横歩きに… --- 2005.07.15 16:40 追記 左足上げの反転スクリプトで右足を上げられないのは、腰ロール軸の原点がずれてるのが原因かも… 体重を計ったときに左の方が重かったし。 あと、左足を上げたとき前に傾くのは右の股/ひざ/足首サーボの原点調整かな…。 ☆[コメント] | |
| 2005/07/13 X-24 | |
|
★
体重測定〜♪
今までずっと「公称2.6Kg」のゴーレムくん。 2つの電子秤に載せて体重測定してみました。 (アンビリカルケーブルを引きずってるけど…) 現在の体重は 2728g でした。 せめて 100g くらいダイエットして欲しいところです。 ☆[コメント] | |
|
★
足上げ練習
「すり足移動」ができたので、今週は足上げの練習。 左に傾けた上体を戻す間に右足を上げるようにしてみました。 (実際は最も左に傾くちょっと前から上げてます) 動画(1.6Mbyte:MPEG1,800Kbps) 上がってる…かなぁ…微妙ですね。 同じスクリプトを4回繰り返しているのに、最初の2回と後の2回で足の上がり方が違うんですが… 次は「左足上げ」→「足踏み」→「遊脚を前へ」かな。 ジャイロ無しで動けるといいんだけど。 ☆[コメント] | |
| 2005/07/12 X-25 | |
|
★
(URLメモ)ロボフィープレス発表会
2005.07.09の日記 の続き 7/11 に行われたプレス発表会の模様がメディアで公開されてます。 朝日新聞: 二足歩行が可能、「ロボフィー」発売へ (リンク先は gooニュース) 共同通信(写真記事): 二足歩行ロボットを発売 「ロボフィー」 (リンク先は gooニュース) 一番詳しいのは三月兎さんの robot-fan.net プレスリリース レポートだけじゃなくて歩行動画 まで掲載されてます。 しかし…電磁吸着歩行なのに18万円っていうのはどうなんだろう。 KHR-1より6万円も高い。 電磁吸着+動歩行にすればもっと小さくて弱いサーボにできそうに思うんですが… でも、これをベースに「歩くスーパードルフィー」を作る人が出てきそうです。 ちゃんとした歩行モデルで先を越せるように頑張らなきゃ。 --- 2005.07.12 22:10 追記 公式サイトに「電磁吸着歩行とは何か」の説明が全く無いことが気になっています。 『床に置いた鉄板に足裏の電磁石をくっつけて歩く』 ことだと思っているのですが違うのでしょうか。 何かもっと凄い技術? ☆[コメント] | |
| 2005/07/11 X-26 | |
|
★
まずい…先越されちゃう…
ONOの電脳壁新聞 の 不定期日記 2005年7月11日 経由 2足歩行ロボットの紹介と製作日誌 by KNTP の 製作日誌 から 2005年 7月8日 足踏みモーション この子ってゴーレムくんが目指しているのと似た方法でひざ伸ばし歩行する気がします。 綺麗に足上げしてるなぁ… 今から挽回できるだろうか… まあ、すでに「新歩(WABIAN)」に抜かれているんですけど。 え?先週の進捗? そ、それは…(汗 ☆[コメント] | |
| 2005/07/09 X-28 | |
|
★
(URLメモ)ロボフィー from ボークス
メカトロ仙術「2足ロボット製作記8」経由 ロボフィー | Robofie VOLKS Inc. 歩き戦いそして進化する! 「うああぁぁぁ…先にやられちゃった…このメンバーだとすごいのができそう…」 と思ったけど「プレスリリース」によると電磁吸着歩行だって。 まだまだ、負けないもん! (でもかなり悔しい) 完成披露記者発表会は 7月11日 @ ボークス大阪ショールーム3階「ロボットスタジアム」 ☆[コメント] | |
| 2005/07/06 X-31 | |
|
★
サイトのURLを変更します
「まじかる☆マリオネット」は2年半に渡って monyo.com というドメインの御世話になってきましたが、ちょっと前に witchstyle.jp というドメインを取得したので、今日のネットワークトラブルを機会にドメイン名を変更することにしました。 新しいURLは
になります。 これまでのURLでもアクセスできるようにしますが、今後はできるだけ新しいURLでアクセスするようにしてください。 また、当サイトにリンクいただいている方はお手数ですがリンク先URLを修正してください。 今後ともよろしくお願いします。 ☆[コメント] | |
| 2005/07/05 X-32 | |
|
★
先週末の進捗…ゼロ
土曜日に久しぶりに新宿に出かけて色々まわって… 翌日は疲れてぐったりしてました。 当然進捗はゼロ。 うーん…スクリプト再生処理の実装が… ROBO-ONE GP in 秋葉原もKHR-1アニバーサリーも盛況だったみたいですね。 参考:ROBO-ONE GP in 秋葉原 & KHR-1ファーストアニバーサリー開催 (PC Watch) やっぱり行ってみれば良かったかな…。 (行ってたら月曜日に倒れてたでしょうけど) ☆[コメント] | |
|
★
(URLメモ)リアルタイムJava
スラッシュボックスのむアンテナ経由 MYCOM PC Web から ついにベールを脱いだ米SunのリアルタイムJava んん… これってVM?それともOS? 安くてちっちゃいボードで動くなら使いたいな… ☆[コメント] | |
| 2005/07/01 X-36 | |
|
★
すり足で前進(?)
「何となく歩けそうなんだけど… 」と書いたちょっと後で動けるようになりました。 (前進だけですが…) でも、とても「歩いている」とは言えない… 動画(3.5Mbyte:MPEG1,800Kbps) ☆[コメント] | |
|
★
進捗(ひざと股関節サーボのガタつきが…)
毎晩少しずつ作業中。 コマンドラインからの全サーボの角度指示はできるので、 腰ロールサーボで上半身を左右に揺らしつつ摺足で動けないか試してみたり… (そんなことしてないでスクリプト再生ロジックの実装しなさいよ…) 何となく歩けそうなんだけど… 股関節とひざ関節に1.5度くらいのガタがあって、腰部分で合計3度くらいの誤差になるので、何度か左右に揺れると前後方向のバランスが崩れちゃう。 (ジャイロ入れて補正すれば何とかなるのかな?) で、ガタの原因はサーボ自体だと思っていたけど、どうもサーボの出力軸とアルミサーボホーンの間がガタついているような感じ。 ダメなのは出力軸とホーンのどっちだろう… …余ってるアルミサーボホーンがないから確かめられないや。 アルミサーボホーンを買い足すくらいなら SC-EZA で全部組み直しちゃおうかなぁ… (プラのサーボホーンをネジ止めするの苦手…) …あれ?もしかしてローハイトじゃないアルミサーボホーンってもう売ってないの? ☆[コメント] | |







トップページ
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年
2021年: 1Q
2020年: 1Q 2Q 3Q 4Q
2019年: 1Q 2Q 3Q 4Q
2018年: 1Q 2Q 3Q 4Q
2017年: 1Q 2Q 3Q 4Q
2016年: 1Q 2Q 3Q 4Q
2015年: 1Q 2Q 3Q 4Q
2014年: 1Q 2Q 3Q 4Q
2013年: 1Q 2Q 3Q 4Q
2012年: 1Q 2Q 3Q 4Q
2011年: 1Q 2Q 3Q 4Q
2010年: 1Q 2Q 3Q 4Q
2009年: 1Q 2Q 3Q 4Q
2008年: 1Q 2Q 3Q 4Q
2007年: 1Q 2Q 3Q 4Q
2006年: 1Q 2Q 3Q 4Q
2005年: 1Q 2Q 3Q 4Q
2004年: 1Q 2Q 3Q 4Q
2003年
2002年