(コメントの返事に書いたけど日記にも書いておこっと)
昨日の日記に書いた「最大歩幅」。
最大歩幅 65mm は「今のゴーレムくんの歩行方法の場合」です。誤解を与える書き方でごめんなさい。
今はジャイロ無しで安定させるために「一歩ごとに移動速度をゼロにする」という歩行になっています。
左右の足を線形倒立振子に見立てて、踏み出し時には軸足が振子、遊脚接地後は前足が振子になるように動かしています。
(図1)
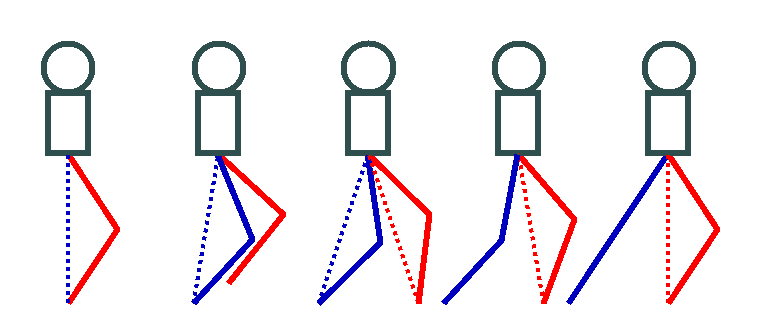
図は時間ごとの歩行姿勢を横に並べています。(左端が初期姿勢、右端が一歩の終了時)
赤実線は遊脚、青実線は軸足、点線は仮想的な倒立振子です。
踏み出しは振子が倒れる速度に併せて上体を動かし、接地後は倒れた振子が立ち直る速度に併せます。これで静止状態から一歩踏み出して、もう一度静止状態に戻ることができます。
一歩が終了した時、「前足、後足ともに接地していて、前足は上体直下」という姿勢になります。
ここで後脚のひざを伸ばしたときにとどく距離を最大歩幅としています。
脚の長さをL、股関節の高さをHとすると、
最大歩幅 S =√(L^2 - H^2)
ゴーレムくんの場合、脚長さ(股ピッチ〜足首ピッチ)=147mmなので、股関節高さ(正確には股ピッチ、足首ピッチ間距離)を130mmの場合の最大歩幅は約68mm。
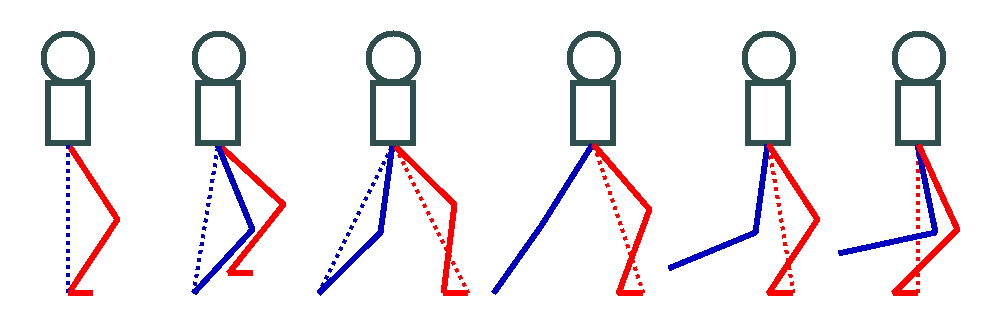
一歩ごとに静止しないなら、上体が前足の直上に来る前に後足を浮かせることができるので、もっと歩幅を増やせます。(流行の「走ってるように見える歩き」はこっちかな…)
(図2)

また、足裏が前方向に長いことを利用して、つま先を支点とした倒立振子に見立てることができるように思います。
その場合、(図2)の一歩終了時に速度ゼロにならなかった上体を止められるので、足首からつま先までの長さ分、歩幅を長くできる気がします。
(図3)
んー…色々書きたいのに図でうまく説明できない…
(図1の歩きでも上体の速度ゼロにしない方法あるし、図3は他にも活用方法あるんだけど…)
[
☆コメント]
[
△先頭へ]
{kind=link}
{kind=link}
{kind=link}