|
2004/08/30 X-67
|
★ X-60 X-67 X-Day修正
「ROBO-ONE Special in 花やしき」は 11/6,7 開催に変更になりました。
これで1週間夏休みを取って旅行にいっても大丈夫かな…
そろそろ作業再開しなきゃね。
☆[コメント]
|
|
2004/08/27 X-63
|
★ ROBO-ONEアンテナ不調
なんか… geocities.jp の Last-Modified ヘッダがおかしい。
一昨日までは、ちゃんとファイル(index.htmlとか)の更新日付を返していたのに、
昨日から常に取得(HTTPのGET/HEAD)した時間になっちゃう。
仕方がないので、ページの中身が変わったかどうかをチェックする方法に切替え。
ファイルの更新日付を返せないのなら Last-Modified ヘッダ付けないで欲しいんだけど…
運用側も利用者側もそんなの気にしてないんだろうなぁ…
まぁ、元の状態に戻っただけといえばそうなんだけど。
---
参考:ROBO-ONEアンテナ
☆[コメント]
|
|
2004/08/25 X-65
|
★ Treva
なんか…
最近Trevaのヤフオクでの開始価格が上がってる。
出品数が減ってきたところへロボ製作者が買いはじめて、相場が上がっちゃったかな…
もっと早く買えば良かった。
☆[コメント]
|
|
2004/08/23 X-67
|
★ 「アイ,ロボット」先行試写会申し込みました
結局いつも通り一人なので、会場で見かけたら相手をしてあげてください。(何
☆[コメント]
|
★ (URLメモ) Linux でハードウェア(RT-Linuxを使わない実時間処理の方法)
「ロボット工学講義情報」と同じ
ロボット開発工学(東北学院大学 機械創成工学科 熊谷研究室のページ)から
RT-Linuxを使わずに実時間処理を行うためのテクニックの紹介
周期処理を補助するデバイスドライバを作って、ユーザプロセスと連動させる方法とか、
ユーザプロセスからのハードウェア制御とか、
デバイスドライバの作り方とか色々。
とりあえず、PIC側から同期メッセージを送ってリアルタイム処理もどきにしようかと…
(10msec 間隔で、誤差 1msecくらいあっても大丈夫そうだから)
「逆運動学」よりもこっちが先だね。
☆[コメント]
|
★ (URLメモ) ロボット工学講義情報
二週間くらい前に「運動学 DH法」でGoogle検索してて見付けました。
ロボット開発工学(東北学院大学 機械創成工学科 熊谷研究室のページ)から
DH法がどういう概念なのかはなんとなく判りました。
回転・移動行列を使って座標変換を繰り返すんですね。
これで逆運動学をリアルタイム計算するプログラムを作れるかな…
あと、同じところで見付けたのが
これを使ってPICのプログラムのドキュメントを作ろうかと。
---
金沢工業大学 学習支援計画書も、参考図書が載っていて助かります。
☆[コメント]
|
|
2004/08/17 X-73
|
★ (URLメモ) Linuxにビデオカメラ(ウェブカメラ)をつなぐ
Linuxにビデオカメラ(ウェブカメラ)をつなぐ
Linuxで使えるUSBカメラのリストが出てるのでこれを CLIE にメモっておこっと。
もちろんゴーレムくんの視覚プログラムを開発するためです。
ゴーレムくんには Treva を載せると思うけど。
☆[コメント]
|
|
2004/08/15 X-75
|
★ 魂の叫び(?)
Project Autowalkerに Dr. GIYさんの「魂の叫び」が…
ゴーレムくんも2年前のデビュー以来ずっと同じサーボです。
(あ、こないだ股関節ピッチ軸を Red に交換したっけ)
大会の時に足首サーボの動きが渋くなったことをKOの人に相談したら、
「ギヤが摩耗してクズが溜ってるのかも」って言われたし
私も新しいサーボ欲しいよーーー
せめて、手持ちの2144を Red Version の基板に交換して欲しい(笑
そういえば壊れたサーボをKOに送ると修理見積りしてもらえるんだった。
動きが渋いのも一緒に送ろうかな。
…って、何よりも欲しいのは「3時間以上バッテリー動作できる1kg以下のノートPC」かも
---
「オルテガハンマー炸裂」映像ありがとうございました。 > Dr. GIYさま
次回は返し技とともに予選突破したいと思います。(笑
☆[コメント]
|
|
2004/08/14 X-76
|
★ ゴーレムくん御披露目
昨晩の食事会にはゴーレムくんを連れて行きました。
ROBO-ONE会場以外で人に見せるのは2回目かな…
(1回目は Night for Java Technology の時に友達に見せた)
最初は屈伸だけのつもりだったのだけど、
興味を持ってもらえたみたいなので、練習中の「左足一歩前へ」を披露。
成功するのは3回に1回くらいなんだけどね。
楽しんでいただけたようで良かったです。
…でも「作りたい」っていう人は増えない…
知合いはソフト屋さんが多いから仕方ないかな。
色々質問されたときのためにスペックとか構成とかを整理してWEBに載せなきゃね。
☆[コメント]
|
|
2004/08/10
|
★ X-80 X-DAY再設定
次の区切りは 10/30,31 の「第2回ROBO-ONEスペシャル in 花やしき」
受付時間まで 80日と13時間
最低でも「歩行」と「起き上がり」を完成させて「ROBO-ONEダッシュ」にエントリーしたいです。
間に合うようなら TREVA を使った画像認識も…
…と言いつつ
一週間ほど開発をお休みしてリフレッシュします。
今回はかなり疲れました。
---
開発お休み…と言いつつ、「まじかる☆マリオネット」のコンテンツ(PICのソースコードとか)を整備したり、「ROBO-ONEアンテナ」のメンテナンスしたりしそう…(笑
アンテナに更新部分表示機能とかも追加したいね。
(hatenaのアンテナに付いてるようなアレ)
☆[コメント]
|
|
2004/08/09
|
★ ROBO-ONE 第6回 感想 (その他)
1) 楽しみにしていたのに見られなかったもの
・メタちゃんの逆立ちアタック
・不知火のオルテガハンマー炸裂
お二人のWEBページを見てみると、本戦前に不調になっていたとのこと。
次の戦いではさらにパワーアップした技に期待しています。
「オルテガハンマーでA-Do6号機やCHROINOの頭がカチ割られるのを楽しみにしていました」
なんて書くと人格疑われそうですが事実です。(ぉぃ
2) 思わず見つけてしまって頭を抱えたもの
・オリジナルマインドさんの黒い奴
予選の日に控え室でデモをしていました。
思ったよりも小さいですねぇ…
しかも、材料を載せる台をうまく加工すれば切削油を貯めておけそうな感じ。
さらに買いたい気持ちが高まってしまいました。
部屋一杯の本と服をレンタルスペースに追い出して導入すべきでしょうか…
あと、「完成品を購入することはできないんですか?」と質問したら、
「私一人の会社なので組み立ててると他の仕事が止まっちゃうんですよ」
とのこと。
そうだったのね…おつかれさまです。
---
他にも控え室でたくさんの人と色々な話ができて、刺激的な2日間でした。
歩行方法についてアドバイスして頂いた方々ありがとうございます。
土曜日の夜に歩幅を半分にして試したら、3回に1回くらい一歩を踏み出せるようになりました。
--- 2004/08/10 0:30 追記
今回、ついに賞品をもらえましたっ!
「予選落ちしたみなさんにアイ・ロボットのTシャツを差し上げます」
…って、参加賞じゃん。
☆[コメント]
|

アイ・ロボットのTシャツ
背中には「ロボット三原則」
|
★ ROBO-ONE 第6回 感想 (本戦編)
…って、一回戦は寝過ごして見てない…
(次回こそは予選前日にちゃんと睡眠をとろう)
個別の戦いについては「頑屈王国ネオ」のAugust 2004 バックナンバーがお薦め
今回の本戦で一番印象に残ったのは、韓国勢の「引き倒し技」
相手に正対せず半身の状態で、相手の肩や頭のあたりに手先を引っかけて、相手が倒れやすい方向へ引っ張っるように移動して、相手のバランスを崩します。
足首サーボへもかなりダメージを与えそうな感じ。
たまに自分が倒れてしまうことがあったけど、うまくふんばって相手だけを倒していました。
(というか前後に脚を開いて体重移動で相手を倒しているのかも)
相手を引っかけやすいように手先の形状も工夫しているようでした。
(写真が無くて説明がわかりにくくてすみません)
Dynamixelのパワーのなせる技なのか、ひざを曲げた低い姿勢での摺足移動(これもすごく良かった)の効果なのか、すばらしい攻撃でした。
場合によっては「引き倒し」というよりも「上手投げ」に近い感じがありました。
今後、もっと多彩な投げ技がでてきそうで楽しみです。
決勝戦では九大チームも似たような攻撃をしていたけど、当日モーションを作ったのかな…
正面の相手に倒れつつ飛び込む「フライイングボディアタック」(?)よりも見ていて格好よかったです。
あとは、優勝した九大チームが「重量級ハイパワー」路線の問題点を垣間見せてくれたことかな。
ハイパワーサーボと動力源のバッテリーが発熱に耐えられなさそう。
ラウンド間の2分間に4人がかかりでサーボとバッテリーを一生懸命冷やしてました。
戦いが長引けば、サーボが熱ダレして動けなくなるかも…と思ったけど、今回はそういうシチュエーションにはなりませんでした。
金銭的にも運用的にも小人数のチームには真似できなさそうです。
次回も主流は 2kg台のロボットかな…
「金銭的」といえば、「今回参加していた韓国勢はほとんどが準ワークス」という話を聞きました。
「準ワークス」というのが、「金銭的、資材的な支援を受けている」なのか「発売前の製品を優先購入できている」なのか「技術的な支援を受けている」なのかレベルがはっきり判りませんが…
(聞いた気がするけど忘れました…:ぉい)
ただ、日本で一個27,300円もするサーボを20個以上搭載したロボットを製作していることを考えると、「金銭的な支援があるのかなぁ…」と思ったりもします。
遠征旅費も馬鹿にはなりませんしね…。
ただ、ワークスならワークスと言って欲しかったかも…
別にアマチュアの大会というわけではないから、ワークスでもアマチュアでも関係ないのでしょうけど。
数倍もの資金力を見せつけられるとモチベーションに影響するので。
---
などと苦言を呈したりしましたが、回を重ねるごとに良い大会になっていると思います。
ROBO-ONE委員会および関係者の皆様ごくろうさまでした。
☆[コメント]
|
★ ROBO-ONE 第6回 感想 (予選編)
今回は予選前日に徹夜していない(といっても寝たのは3時間)から感想が書ける(笑
まずは「予選」の感想
控え室のモニターでたまに見ていただけなのであまりコメントできないけど…
予選が完全自立になったことで、転倒するような無茶な動作をしないロボットが多かった気がします。
それでも、ブレイバートのように長槍を持ったまま連続前転するロボや、吉式のように果敢に不整地歩行をアピールするロボはいました。
でも、圧巻は予選一位のA-Do6号機のスキップでしょうか。
普通の歩行ではなく、軸足を着いたときにちょこっとジャンプするのです。
影さんのモーション作成の技の極みを見た気がします。
頭の中にシャボン玉製造機を入れるとか、観客の拍手で動作が変わるという菅原さんのアイデアもさすが。
ギャラリーを楽しませることに重点を置いているのがよく判ります。
ちなみに、途中で明かされた(!?)採点方法は
・規程演技(本の登り降り)ができて0点
・注目される動作があると加点
・手でロボットを立て直すなどの手を触れる行為があると減点
でした。
予選通過ロボットはどれも歩行が安定していて、ジャイロによる姿勢補正が必然になった感じ。
加速度センサーを使った「転倒からの自動復帰」ができるロボも多そうです。
次は、「ジャイロによる姿勢変化検出をどれくらいうまく使うか」というソフト面になるのかな…
(股関節ヨー軸が0度以外のときに、ロール軸、ピッチ軸のジャイロ出力をどう割り当てるか等)
それと、サーボからの回転角度フィードバックをどう生かすか。
あと、「形にこだわったロボ」が増えているように思いました。
足がすらっと長かったり、ちゃんと顔があったり、可動翼が付いていたり(笑
「歩くのは当然、演技と見た目でどれくらい注目を集めるか」
といった感じでしょうか。
本戦の戦いも面白いですが、予選でのデモンストレーションもどんどん面白くなっていると思います。
(ロボ製作者としてはね)
☆[コメント]
|
|
2004/08/08
|
★ 九大チーム優勝おめでとう
…って、前回もこのタイトルだったような…
圧倒的なパワーで5Kgの巨体を従来通りのスピードで動かす技量はさすがでした。
「RV量産の暁には FREEDOM IIIなぞ、あっと言う間に叩いてみせるわ!」
という声が聞こえるような…
(無理です。あんなの量産したら予算がいくらあっても足りません)
FREEDOM III と同じ Dinamixel を使った韓国ロボの動作のスムーズさも目を見張るものがありました。
流行は「軽量小型」から「重量級ハイパワー型」へ移るのかもしれません。
次の目標は 10/30,31 の「ROBO-ONEスペシャル in 花やしき」
ダッシュだけでも出場したいと思います。
---
今回も色々な方とお話ができて勉強になりました。
今後ともよろしくお願いします。
☆[コメント]
|

本戦に出場したロボットたち
|
|
2004/08/07
|
★ X+12h そして今回も棄権…
今回は遅刻することもなく参加受付ができました。
…が
事前審査を受けるまでもなく棄権です。(泣
応援に来ていただいた方には、ゴーレムくんの屈伸三回で我慢していただきました。
しかし…2年半かけてようやく屈伸だけとは、電子工学を修めた身としては恥ずかしいかぎり…
みなさんから「ここまで来たらあともうちょっとだから」という励ましの言葉をいただいたので、10月のROBO-ONEスペシャルに向けて頑張りたいと思います。
☆[コメント]
|

ゴーレムくん屈伸動画
(mpeg1 3.4MByte)
撮影:jintaroさん
|
★ X-5h 今回も事前審査通過できない…
…歩けないよ…
っていうか左右の体重移動すらできない…
会場にゴーレムくんを連れては行きますが、事前審査を通過できそうにありません。
(泣
☆[コメント]
|
|
2004/08/06
|
★ X-12h VAIOくん復活…か?
借り物の VAIO C1XE は Debian の最小インストールでした。
X11の設定もなにもされてなくて、LANカードのドライバすら入ってない…◯| ̄|_
で、「もしかしたら充電されるのかも」と思って、動かない VAIOくんをAC電源に繋いだまま放置してみたら…
電源ランプが点滅するようになったーーーー \(^-^)/
わーい
問題一つ解決。
(放置する前に一度分解したりしてたので2時間のロス)
☆[コメント]
|
★ X-14h ピーンチ VAIOくん死亡
むーーーー
「そろそろ明日の準備を…」と思って VAIO C1S の調子を見ようとしたら…
起動しないじゃん!
…っていうか電源入らないし…
バッテリーが切れてるのかと、AC電源を繋いでみたけどやっぱりダメ
電源ランプすら付かない。
別のAC電源に繋ぎ変えてもダメ
バッテリーの故障を疑って、バッテリーを外してAC電源に繋いだけどダメ
BIOSのバックアップ電池が死んだかな…
明日は、友達から借りていた VAIO C1XE を連れて行くしかないか…
あーー
ってことは WideStudio 使えないじゃん
るるる… (T-T
☆[コメント]
|
|
2004/08/05
|
★ X-1d12h 屈伸できるようになりました
なんとか屈伸できるようになりました。(動画はあとで)
L-Card上のシェルスクリプトから PICへコマンド送信しているのですが、意外ときびきび動いているような…
秒間8フレームくらい動いてるみたい。
(「1フレーム=23個のサーボへの一括角度指示」という意味で使っています)
今回はシェルスクリプトのまま頑張ろう。
現在、股関節ロール軸のサーボをハイパワーギヤに交換中
今日中に足踏みできるようになるかな…
☆[コメント]
|
|
2004/08/04
|
★ X-2d10h (URLメモ) Maxima : a sophisticated computer algebra system
IRCで「行列式がわからんー」って言ってたら
「Maxima 使って勉強しなさい」と言われました。
Maxima - a sophisticated computer algebra system
Excite翻訳(AMIKAI)によると、タイトルの日本語訳は
「Maxima - 精巧なコンピューター代数システム」
らしい。
(ほんとは Maxima を 「最大限」と訳してくれたけど)
…使いこなせるのかなぁ…
#間違ってもファティマもどきのことではありません。
--- 2004/08/05 00:05 追記
ちなみに、わからないのは
「DH法による順・逆運動学」 (OGAWA'S ROBOT LAB)
に載ってるような行列式です。
☆[コメント]
|
|
2004/08/03
|
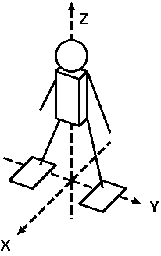
★ X-3d15h 座標系
色々考えてみたけど、関節角度をひとつひとつ指定して歩かせるのはめちゃめちゃ大変そう…
なので、やっぱり計算させよう。
(負荷でサーボ位置がずれるだろうけど参考にはなるはず…)
左右の足に重心を移しつつ、腰部分の前進速度を一定にして、さらに両足裏の位置が動かないような動作を想定したときの関節角度を計算すればいいはず…
まず、座標系をどうするか決めようと思って、「ロボット 座標系」でGoogleしてみたら、なんか色々見つかった。
んー、2年前に検索したときには有用なのが無かったと思ったのに…
座標系は
前方向を X軸、左手方向を Y軸、上方向を Z軸
にします。
---
い、今ごろこんなことしてて大丈夫なのっ!?
(なんか、前回も直前に同じ様なことしてる…)
☆[コメント]
|
|
|
2004/08/02
|
★ X-5d8h 歩行練習中…(大丈夫?
股関節ピッチ軸のサーボを KRS-2346ICS に交換
ロール軸のサーボのギヤ交換は後回し…
なんとか片足で立つところまで行きました。
…が
遊脚をちょっと動かして重心位置がずれると、足首ピッチ軸のサーボが負けてしまいます。
負ける前に遊脚を地面に付ければいいのかな…
前途多難。
今日判ったこと)
- やっぱり左足の集線基板の接触がおかしい。
(ピン端子の根元をつつくと直るので、半田不良かも)
- 手足のサーボは左右で回転方向が逆になるので角度指定が大変。
(スクリプトプレイヤーに回転方向の反転機能を実装すること)
- 長く放置していたニッケル水素電池を、いきなり 1C 充電してはいけない。
(充電器が充電完了を検知できないようで過充電になっちゃう)
残り必須作業)
- 歩行、屈伸、起き上がりモーション作成
- 動作開始用スイッチ作成
- スイッチ読み取り(GPIO読み込み)プログラム作成
(成松さんのGPIOドライバを入れる)
- 無線モジュールとの通信処理作成
間に合わないなら諦めましょう)
- ノートPC側コントロールプログラム
- 加速度センサ実装(転倒判定機能)
- 角速度センサ実装(バランス向上)
- 顔の作成
木金お休みするけど、それでも間に合わなそう…
☆[コメント]
|

