2004/12/29 X-79
★
誕生日なのに雪積もってますよ…
自分のバースデープレゼント(?)を買いに行こうと思ってたのに、雪じゃないですかっ!
しかも、絶賛積もり中…
お日さま見えないからどんどん積もっちゃうんだろうなぁ…
今年の貯金額が目標を超えたら、そのお金でバースデープレゼントを…
…と思ってたんだけど、結局目標額に3万円不足。
(先日のロボ部品とTVキャプチャカード購入が余計でした)
目標を5万円下げて、差額の2万円で新しい服を買うことにします。
ドメインの取得は年明けに先送り。
ドールを買えるのはいつになるんだろう…
☆[コメント]
|
|
2004/12/27 X-81
|
★
昨日のお買物(ホーン交換、ロングケースビス、フリクションスペーサ)
忘年会の時にサーボホーンを買ったのだけど、
プラホーンにネジを入れるのが下手なので、アルミサーボホーン(ガンメタリック)に交換してもらうことに。
ついでに、買い忘れていたロングケースビス(20本入り)と、フリクションスペーサ(4個入り)も購入。
…って良く考えたら新年会の時でも良かったんじゃ…
☆[コメント]
|
|
2004/12/23 X-85
|
★
(URLメモ) 韓国の等身大二足歩行ロボット
Robot-Fanの=伝言板= の106番の投稿 経由
中央日報 から
【写真】韓国のアシモ「HUBO」
韓国科学技術研究院(KAIST)機械工学科・呉俊鎬(オ・ジュンホ)教授チームが開発した両足で歩くロボット「HUBO」が22日、KAISTの研究室で歩く動作のデモンストレーションを行っている。同ロボットは身長125センチ・重さ55キロで、時速1.25キロで歩く。韓国内で両足で歩く歩行ロボットが開発されたのは初めて。
(以下略)
「韓国内で両足で歩く歩行ロボットが開発されたのは初めて。」
って…ROBO-ONE Korea に出てるロボは無視? (笑
=伝言板=の106番の投稿にある他のリンク
・韓国型ヒューマンロボット「ヒューボ」誕生 (朝鮮日報)
・歩行動画 (wmv) (出処不明)
・記者会見?動画(wmv) (president.go.kr)
最後の動画で握手してるのって大統領?
会見では「ケンブリッジ大学がふがほげ」って喋ってるように聞こえました。
共同開発なのかな?
---
…あまり関係ないけど…
ちまたの掲示板CGIって、個々の投稿をURLで特定できるのって少ないですね。
みんな不便に思わないのかな…
☆[コメント]
|
|
2004/12/19 X-89
|
★
(メモ)USB経由でサーボ制御したいっ!
という話を昨晩の忘年会二次会で聞いたので
「こんな風にすればできそう」っていうののメモ
案1)
既存のサーボ制御基板 + USBシリアル変換ボード
パソコン側からはシリアルインターフェースで操作。
(USBシリアル変換ケーブルの中身みたいなものね)
ストロベリーリナックス のUSB←→シリアル変換モジュール
(探してみた感じではこれが一番安い)
を買って
中村博士のHSWBとかJinさんのE001とかRCB-1等のRS232C経由で動くサーボ制御ボードにこれを繋げばすぐにUSBインターフェース完成。
パソコン側からは普通のシリアルインターフェースに見えるから、アプリケーションもそのまま動くはず。
案2-1)
USBシリアル変換チップ + ワンチップマイコン + サーボ制御プログラム
パソコン側からはUSB汎用ドライバ経由で操作
変換チップは
これに PIC, AVR, H8とかを繋いでサーボを制御 (マイコンの pin数を選べば 2〜32サーボくらいまで)
案2-2)
USBチップの半田付けや基板製作が大変なら、ストロベリーリナックスのUSBシリアル変換モジュールにマイコンを載せてしまいましょう。
案3)
EZ-USBのような、USBインターフェース付きのマイコンにサーボ制御もさせてしまう。
「ような…」と書いたけど EZ-USBしか知りません。
EZ-USBはUSBコントローラにインテル8051互換CPUが入っています。
8051の開発にはgccを使えないようですが、SDCCというGPLのコンパイラとKEIL Cという製品の評価版が2Kbyte(オブジェクトサイズ?)までの開発に利用できるようです。
ボードとしての製品だと
が安そう。
パソコン側からコントローラへプログラムを送りつけて実行できるというのがいいかも。
問題は 8051 のプログラミングでしょうか。
案1から案3になるにつれて難易度が上がるかと思います。
案2-2でよければ引き受けますよー
(それなら他にもできる人一杯いるって…)
---
イカロスさんがMINI EZ-USBを購入しているみたいですね。
はっ、まさか「ホイホイさん」製作用?
☆[コメント]
|
★
昨日のお買物 (PIC12F675/16F648, SC-EZA)
久しぶりに秋葉へ行くのだから、必要なもの買い込まないと…
と思って昼ごろに出かけるつもりが、秋葉に着いたのは 18:00過ぎ (汗
「18:00閉店だっけ…」と思いつつ秋月へ
まだ開いてました。 (18:00閉店は日曜だけ)
マイコン単体を買ったことなかったので、店員さんに型番を伝えて教えてもらいました。
買ったのは
- 12F675 2個
8pin, 4ch 10bitA/D, 20MHz
- 16F648A 2個
18pin, 16x1/8x2 Timer, 2ch Comparator, 1ch CCP/PWM, 1ch USART
- セラロック(コンデンサ内蔵) 20MHz 4個
- ADM3202 3.3V〜5V対応 RS-232Cドライバ
- TA78L05F 10個
5V/0.1A レギュレータ フラットパッケージ
- ハーフピッチ両面ユニバーサルボード
これで、MSC 3.0 と ICSもどきをブレッドボード上でテストできるようになります。
急いでたのでレシートもらい忘れちゃった…
っていうか、レギュレータ用のコンデンサ買い忘れてるじゃん!
(0.1μFのコンデンサ3つ並べるか…)
---
その後、みんなが集まってるロボット王国へ
買うかどうか迷っていたけど
SC-EZAと、それに必要なものをとりあえずサーボ6個分購入。
やっぱり、ケチケチせずにアルミホーン買えば良かったかな…
(プラホーンにネジ止めするの苦手)
あーーっ… ロングケースビスとフリクションスペーサ買うの忘れた。(T-T
☆[コメント]
|
★
ロボット好き共の忘年会
昨晩は秋葉原某所で「ロボット好き共の忘年会」でした。
当初は「10人で集まって呑むのかな?」って思っていたら、最終的には参加者30人に…
(お店が広くて良かったですね > 幹事さん)
宴会途中でお店の中に特設リングを作ってバトル開始!
今回は世界初(?)のロボレフリー (生茶パンダサンタバージョン)
勝者は…だれだっけ?
その後二次会でもワイワイガヤガヤと騒いでいて、お店から出たときには帰りの電車はとっくに終了。
山手線の最終で品川まで行って、そこからはタクシーでした。
来年こそは予選に出られるように頑張るぞ…っと
---
宴会の詳細は幹事さんが日記に書いてくれると思います。
(うちにはパンダレフリーの写真しかありません)
☆[コメント]
|

世界初(?)ロボレフリー
|
|
2004/12/15 X-93
|
★
MPLAB Ver 7.0
MPLAB Ver 7.0が出ていたので入れてみました。
Ver 6.6 では BreakPointダイアログが使いにくくなってた(BreakPointをラベルで選択できなくなった)けど、Ver 7.0 ではどうかな…
アーカイブは大きいんだけど、必要なのは
Setup type selected: Custom
Components selected:
8 bit MCUs
MPASM Suite
MPLAB IDE
MPLAB SIM
これだけ。
うちには ICE も PICSTARTもないから。
体調がいいうちに作業を進めなきゃ…
---
隊長からは「まずは、何かしら使用して動かすこともいい経験になるはず」とのありがたい助言をいただいているけれど、もう少し自分の技術だけで頑張りたい。
開発に三年もかかってるうちに、ずっと性能がいい製品が出てきてしまったけど、それでも自分で作ってみたいのです。
☆[コメント]
|
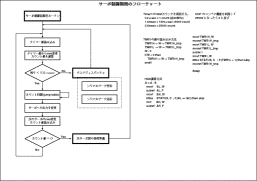
MSC 3.0 サーボ制御周期のフローチャート
|
★
ICSもどき とか RS422 とか
「こんなことしてる場合では…」と思いつつ横道に…
Google検索 「RS422 ワンチップ ドライバ」
どういうキーワードで探せばいいか判らなかったんだけど、偶然気づいた。
うーん…使い方が良く判らないなぁ…
導入できるのはずっと先になりそうですね。
とりあえず、ICSもどきを作ろっか。
普通のサーボに取り付ければ、あなたのサーボもICS対応に早変りっ!
アナログサーボでトルク切替えとポジションキャプチャができるようになっちゃいます。
今ならおまけにオペアンプもサービス!
とか…
一個500円とかで売ったらKOさんに怒られるかな?
ほら、そんなことしている間に、もうあと3ヶ月!
---
なんて書くと、Jinさんが先に開発して発売してしまう予感。
☆[コメント]
|
|
2004/12/12 X-96
|
★
第7回ROBO-ONE注目ビジュアル系機体
(スラッシュドットの日記を読んでいる人向けです)
次回大会のゲスト審査員は大河原邦男さんを呼ぶ予定とか…
それがきっかけなのか、それとも第7回ともなると常連さんは余裕があるのか、
ビジュアルにこだわったロボがちらほら。
でも、しかし…そんなのはまだ序の口です
一番の注目機体は
たぬたぬGクリスマスバージョン !
良すぎです。
言葉が見つかりません。
私も頑張らなきゃ。
☆[コメント]
|
|
2004/12/10 X-98
|
★
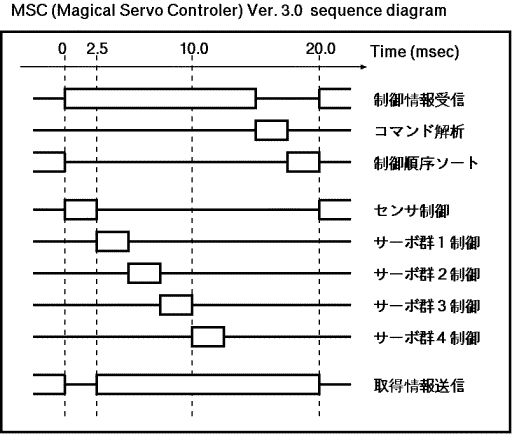
MSCロジック再変更
前の日記のシーケンス図を見ていたら、全然違うロジックでもっとPWM分解能をあげられることを発見。
しかも、そのロジックの方が今のプログラムよりもずっと簡潔…
…ていうか、3年間それに気づかなかった自分って何。
シリアル通信のデータ受信間隔ってPWMの分解能に比べたらめちゃめちゃ長いのね…
(新ロジックのフローチャートとかはまたそのうち)
☆[コメント]
|
★
選択と集中
ONOの電脳壁新聞を見ていると、他の人達は順調に作業が進んでるみたい。
私は相変わらずサーボコントローラのロジック改良中…
モーションエディタ/コントローラもセンサ実装も逆運動学プログラムもできてない…
残り三ヶ月で間に合うの!?
ううう…
とりあえずJinさんのE001基板 や KOのロボット用コントロールボード:RCB-1を買ってしまって
他のところに注力すべきなのかも…
ああ…でも全部を自分でやりたいぃぃぃ…
☆[コメント]
|
MSC 3.0 処理シーケンス概略
|
|
2004/12/08 X-100
|
★
(メモ) 脳波でロボットを動かす (Interface「ロボット探訪」)
Interface 2005年1月号から「ロボット探訪」っていう連載が始まってます。
で、その第一回が
脳波でロボットを動かすという試み
〜 脳波制御で機械を操作する 〜 田中 一男
へぇ…と思って読みはじめたら
いきなり「はじめに」に 「ROBO-ONEのような競技大会に出場できるロボットの脳動制御システム」とか出てる…
あー、「脳波での車いす制御」ってどこかで見たような…
と、さらに読み進むと FantomRing製(?)のロボが…
どこまで動かせるんだろう…
著者の田中一男さんは電通大の先生です。
夏に電通大に遊びに行ったときに見たかったな。
…もしかして次回大会くらいに出場??
参考:
Interfaceホームページ (CQ出版社)
脳波で車いす操作、電通大がシステム試作 (日本工業新聞 2003/12/5)
電気通信大学 田中研究室
---
Googleで検索中に、懐かしい名前を見てしまいました。
今はそんな研究もやってるんですね…
☆[コメント]
|
(リンク先はInterfaceのHP)

2005年1月号発売中
特別号定価 980円
|
2004/12/06 X-81102
|
★
X-day修正 & 足裏規定変更
ROBO-ONE公式ページ で「開催日決定&競技規定変更」のアナウンスがありました。
予選:3/19、決勝:3/20
足裏サイズ: 前後60%、左右40%
友達の結婚式と重ならなくて良かったです。
ドレス着て予選に出ることになるのかと思ってました。
(…普通、式場で着替えるって)
これでまた残り3ヶ月に戻りました。
頑張らなきゃ。
足裏はどのみち15cm超えてるので、角を5mm程切ります。
☆[コメント]
|
|
2004/12/04 X-83
|
★
(URLメモ) トヨタの新型ロボット
ONOの電脳壁新聞(2004/12/03) 経由
fuRo ---未来ロボット技術研究センター 経由
Robot.Mとの優雅な平日 経由
CNET Japanから (経由長すぎるよ…)
フォトレポート:トヨタが描く、新しい自動車のカタチ
トヨタ自動車は12月3日、新たに開発したロボットとコンセプトビークルを公開した。来年春に愛知で開催予定の2005年日本国際博覧会(愛・地球博)に出展する。
今回公表されたのは、人間が搭乗できる歩行型ロボット「i-foot」と、1人乗りのコンセプトビークル「i-unit」。i-footは二足歩行を行い、階段の昇降も可能。後方に折れ曲がる方式を採用することで、乗り降りの際の安定性を確保した。進行方向や歩行速度などの操作はジョイスティックで行う。大きさは高さ236cm、重さは200kg。60kgまでの人間を乗せることができる。歩行速度は1.35km/h。
i-foot歩行動画(52Kbps)のURLは
http://www.japan.cnet.com/2004/sharedmedia/photo/041203_toyota/MVI_1926_52k.wmv
あれ?前に発表したスチュワートプラットフォーム型の歩行椅子はどうなったんでしょう…
あれとは別物なのかな?それともあっちはポシャった?
ジョイスティック操作で動くなんて楽しそう。
ペダルを踏むとジャンプしたりしますか? (違
でも…コクピット回りが取り囲まれてるから転びそうになったとき逃げられないような…
ちょっとでいいから乗ってみたいです。
「操縦者してるのはこうじさん」と言われるとそんな気もするけど…そうなの?
---
WMVが JavaScriptでリンクされてると見るのが難しい…
xine を呼び出すような仕掛けつくれないかな…
--- 2004/12/04 17:23 追記
前の (ITmedia) も良く見たら普通の脚でした。
スチュワートプラットフォームと見まちがえていたようです。
☆[コメント]
|