|
2004/11/30 X-87
|
★
(URLメモ) ジャイロ関連
まだまだジャイロに手が出せる状態じゃないのですが…
参考になりそうなページをメモ。
(実は去年の冬に2つ購入済。ええ、もちろん全く活用されてません:泣)
ライブドアほんとにダメですね…
(買収されたサービスはダメになるという噂は本当だったのね…)
残り三ヶ月を切りました。本気でやらないとまた棄権になってしまいそうです。
☆[コメント]
|
|
2004/11/24 X-93
|
★
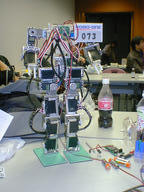
現在 2696g
現状のゴーレムくんの体重を計ってみました。
(右の写真、ゴーレムくんは凄い姿勢で二つの秤に乗ってます)
850g + 1846g = 2696g
重さだけなら他にもこれくらいの体重のロボはいると思うのですが…
ゴーレムくんの場合は、上半身の重さが体重の半分以上(2/3くらい?)を占めているところに問題が…
ちょっと傾いただけでも大きなトルクがひざや足首のサーボにかかります。
しかも、無線ユニットとジャイロ、加速度センサを載せると、あと150gくらい増えそう…
上半身のServoCreationを削って軽量化しないと…
☆[コメント]
|

ゴーレムくんの体重測定
|
★
昨日のお買物(ソルボセイン、電子はかり)
映画とコンサートのために渋谷へ行ったので、ついでに東急ハンズでお買物。
買ったのは
・ソルボセイン
はじめロボットの坂本さんが足裏の反発低減のために使っているらしい
(第5回カンファレンスの発表で聞いた)ので真似しようと思ってる
…のだけど、ハンズには軽量で柔らかいのと重くて固いのの二種類が…
はじめロボットにはどちらが使われてるんだろう…
・電子はかり
これまでは 1kgまでしか計れないキッチンスケールだったので、2kgまで計れるのを買いました。
これでゴーレムくんを解体せずに計量できる…と思ったのだけど
どうせならこれを2個買えば良かったかな。
☆[コメント]
|

電子はかりとソルボセイン
|
|
2004/11/22 X-95
|
★
進捗 MSCロジック変更作業中
相変わらず MSC : Magical Servo Controller (某社のCコンパイラではない)のロジック変更作業中。
タイマー割り込みで動いていた処理を、フリーランタイマーに書き直す作業がようやく終了。
これで、レジスタ退避のための20ステップが減りました。
次は、PWMピーク幅の順にソートするルーチンの作成。
ROBOCON Magazine No.11 で紹介された青山学院大学の Mk.5 (morphの前身になるのかな?)のサーボ制御プログラム Cherry の実装を真似しようとしています。
以前、もやねさん(メインページお休み中)が同じ手法で 16サーボ同時制御+I2C通信のプログラムを作って公開されていました。
MSCは 24サーボ同時制御+ジャイロ読み取り+ポジションキャプチャ+RS232C通信になる予定。
もっとも今の設計だと制御角分解能は 1degくらい…。
(ダメじゃん)
RS232Cのフロー制御を入れるかどうかで悩み中です。
あ、マイコンは PIC16F877 一個(秋月のPICモジュール)です。
☆[コメント]
|
|
2004/11/19 X-98
|
★
ROBO-ONEアンテナの方向性
「あんた、そんなことで悩んでる場合ちゃうやろ」って感じですが…
アンテナを動かし始めた当初は、ゴーレムくんを作る上で参考になるサイト(特に参加者の製作日記)を追っかけるのが目的でした。
まだ第二回ROBO-ONEが終わった頃で、テクニカルカンファレンスも始まっておらず、サーボの改造方法や制御方法、歩行技術に関するトピックは参加者がWebで公開しているものが頼りだったからです。
各参加者のWeb更新をできるかぎり追いかけて自分の技術向上に結びつけたいと思いつつ、Web更新を追いかけていると開発作業が進まないというジレンマを解決するための手段がROBO-ONEアンテナでした。
…が、現在では初期開発時の技術トピックは各参加者の過去日記に埋もれてしまったので、ROBO-ONEアンテナが技術的なトレンドを追っているかどうかは微妙です。
技術的な情報を追いかけるというよりも、ROBO-ONE参加者のコミュニティ動向を追いかけてるような気がします。
新しい参加者の開発日誌などで過去の技術トピックが参照されたりするので、良いところを見付けたら追加登録するようにしているのですけど…
このまま登録数を増やしていくと「ロボあんてな」との違いがなくなっちゃいそうです。
ROBO-ONEアンテナはこのままの拡大路線ですすめて、技術トレンドを追うページを別に作ろうかな…
テクニカルカンファレンスの資料を技術別に分類しなおすだけでも、結構使えるページができそうに思うのですけど…
…って、それはONOさんとこの「歩行ロボットリンク集」と同じか…
---
あれ?前にも同じようなことを書いた気がするけど…気のせい?
☆[コメント]
|
|
2004/11/16 X-101
|
★
第7回大会に向けて
ようやく足踏み(もどき)まで辿り着きましたが…
今の構成のままでは歩けるかどうか怪しいです。
ほりさんからのコメントにあるように、
脚を短くすればいいんですが…
菅原さん他数名の方から「ジャイロ入れれば歩けるよ」と助言いただいたので
「ジャイロさえ入れればきっと歩けるさっ!」
という方針でいきたいと思います。(大丈夫?
まず、サーボ制御用PICでジャイロの値を読めるようにしないと。
今のプログラムでは他のことをやる暇がないので、ロジック全面改修。
☆[コメント]
|
★
これからも「人形つかい」でよろしくです
もうひとりの「人形つかい」さんからお返事いただきました
このままどちらも「人形つかい」という名前のままになりそうです。
もしも、私が RoboCup に参加することになったら「まじかる☆マリオネット」でエントリーかな。
(いつになることやら…)
んーー
うちのページももう少しかわいくしたいなぁ…(無理
☆[コメント]
|
|
2004/11/14 X-103
|
★
今日のワールドレコーズ
むーやっぱり日テレの電波状況最悪。
垂直同期がずれててキャプチャカードでの録画はボロボロでした。
何とか見られる程度。
戦いのほうは微妙だったかな…
第一回に比べるとロボの歩きが遅かったのでテレビ映像としてはどうかなぁ…と思いました。
ロボ開発者としては技術的なポイント満載で楽しめたのだけど、一般視聴者の反響はどうなんでしょう。
---
自分のロボは動いてないのに偉そうなこと言ってますね > わたし
☆[コメント]
|
★
日テレの写り悪い− (T-T
ううう…今日は何か日テレの写り最悪
ゴーストが出るだけじゃなくて、たまに垂直同期までずれちゃってる…
お昼のワールドレコーズ特番はうまく録画できませんでした。
夜は直ってるといいんだけど…
今日はレフェリー違う人みたいですね。
☆[コメント]
|
|
2004/11/12 X-105
|
★
(録画メモ) 11/14 19:58- 日テレ ワールドレコーズ 「ロボット・バトル世界一決定戦」
ROBO-ONE公式ページから
日本テレビのワールド☆レコーズ(11/14 19:58〜20:54放送)のロボット・バトル世界一決定戦にアリウスとマジンガアが出場します。
ぜひご覧下さい。
Yahoo ! TVから
放送日時 11月14日(日)19:58〜20:54 日本テレビ Gコード(73758714) iEPG予約
ってことで、先々週に予告がでてたやつですね。
日記に「録画メモ」って書いたら録画PCが勝手に予約してくれるといいのに…
☆[コメント]
|
|
2004/11/11 X-106
|
★
ラジコンサーボの耳
せっかく軸付きボトムケースを作ってくれるなら、耳を長辺側に移したケースも作って欲しいなぁ…
…と、「よっしー隊長の YRS-4649 ICTELYO Blue Version」(2004.11.11の日記) を羨ましく思いながら考えるのでした。
YRS-4649への加工を隊長にお願いしたらいくらかかるのかしら…
あ、そうすると SC-EZA for YRS-4649 (?) も必要になっちゃうのか。
☆[コメント]
|
★
(アンテナ) ライブドア障害中?
aaacafe のサービスが livedoor に移ったみたいですが…
当初、新しいURLに自動転送されてたみたいなのに、表示できなくなっちゃいました。
このために、SISOさんとことSUMYさんとこの更新チェックがおかしくなっています。
御了承ください。
ROBO-ONEアンテナ
☆[コメント]
|
|
2004/11/08 X-109
|
★
X-Dayリセット
第7回ROBO-ONEは 2/26,27 日本科学未来館。
第1回の会場で吉村さんのR-Blueを見て感動して、
「自分も作って参加するしか!」と思い立ったが吉日からもう3年。
事前審査が無かったおかげでリングに立てた第3回から見ても、すでに2年…
うーん…
今度こそ事前審査を通過して予選に参加しないと、出入り禁止になってしまうかも…
でもでも、今日会社へ行ってみたら、メールサーバが素敵にトラブっていて、
今月は残業一杯になってしまいそうな予感。
☆[コメント]

ゴーレムくん零号(未完成)
(2002/07/30 自宅)
|
ゴーレムくん壱号
(2003/02/02 会場控え室)
|
|
ゴーレムくん弍号(開発途上)
(2004/10/22 自宅)
|
|
2004/11/07 X+1
|
★
第2回 ROBO-ONE Special 終了
今回は奮発して近くのホテルに泊まったので初日の最初から楽しめました。(Stairs見損ねたけど)
総合優勝は Stairs 1位、Dash 2位、Ball 1位、Door 1位 と抜群の機動性を見せつけた Dr-GIYさんの「ヨコヅナグレート不知火」でした。
(ROBO-ONE公式ページにも結果が掲載されてます)
あの体重であの機動性を確保しているのは、やっぱりオリジナルモータのおかげなんでしょうか…
Dashは 前回のトライアルの時と同じく「コースの板がゆがんでてまっすぐ歩けない!」という状況。
先日のカンファレンスで紹介されていた「デジタルコンパスモジュール」を装備していた人はいなかったようです。
みなさん間に合わなかったのかな…
(不知火にデジタルコンパスが付いていれば Dash もトップだったでしょう)
体重を60gの裏技術研究所の「あど・バルーン」は可愛くて子供達に大受け。
手に乗せて遊べるのがいいよね。(2時間くらいでしぼんじゃうそうですが…)
---
結局、今回も棄権となってしまいました。
懇親会では委員長から「飲み会ばっかりじゃなくて競技にも参加してください」と警告が… ('-';;
つ、次こそはかならず!! (どっかの悪役みたい)
---
初めて花やしきへ行ったのですが、あまりの濃縮ぶりに感動。
小さい頃に近所のデパートにあった屋上遊園地みたい…
(ジェットコースター乗ってみたかったけど、一人で乗るのは恥ずかしかったのでやめましたよ)
☆[コメント]
|

ステージ周辺(ごちゃごちゃ…)

あどバルーン on EAGLE

夕暮れの花やしき
|
|
2004/11/06 X-0
|
★
h ホテル到着 & 悪あがき終了
久しぶりに週末夜の首都高速を走りました。
って、ルート間違えた上に降りるとこ通り過ぎるし…
ホテルに着いたのは深夜1時
吉村さんや Dr-GIYさんも同じホテルみたいですが、明日に備えて寝ちゃってるでしょうね。
結局、ゴーレムくんは今回も棄権です。
自律動作開始用のスイッチを付けられませんでした。
(って、それ以前に歩いてないだろ!)
なんとか足踏み(かなり微妙)はできるようになったし、体重移動のヒントもつかめたので、次こそは歩けるようになるんじゃないかと思います。
(センサーで補正しないと難しいでしょうけど)
ということで、明日は観戦しつつ足踏みを極めようかと…
☆[コメント]
|
|
2004/11/05 X-0
|
★
X-13h ようやく片足上げ下げできた…かな
PIC側サーボ制御プログラムは、新たに追加したスイッチ読み込み
などの機能を全部コメントアウト。
そして、通信速度だけを 19.2Kbps から 38.4Kbps に変更。
ようやく歩行練習を再開したけどやっぱりうまくいかない…
あきらめて、片足を上げるだけの練習に
スクリプトを直して、動作をみて、またスクリプトを直して…を2時間程繰り返した結果…
「片足上がりましたっ!」
静安定ではどうしても片足時にフラフラしてダメだったので
あきらめて体重移動の反動で足を浮かせるようにしました。
(浮いてるのは 0.5秒ないくらいなんですけど…)
これでもしかして歩けるようになる!?
…でも、これくらいなら2年前にできてるような…
---
でも、どう考えても明日の朝には間に合わない… (T-T
今から支度してホテルへ移動します。
☆[コメント]
|
★
X-17h 高速化失敗 & ひざサーボ交換
計算上は 57.6Kbps でもバッファリングできるはずなのに…
L-Card側のプログラムがいい加減なせいもあって、原因わからず。
さらに、
ひざのサーボが左右で回転角が違ってきてる…
やっぱり右ひざサーボはもうダメみたい。
結局左右のひざサーボを 2346 Red に交換。
んーーーーーーーーーー
今回も事前審査通過できない予感。
☆[コメント]
|
|
2004/11/04 (ROBO)(URLメモ) 変ドラ第八回「ラジコン大海戦」
|
★
(URLメモ) 変ドラ第八回「ラジコン大海戦」
まっしもアンテナ経由
陰気な男でいいですか?経由
変ドラ第八回「ラジコン大海戦」〜and Sunekichi the great cousin〜
す、すごい…
ドラえもんってこんなストーリーもあったんだ。
え?「これのどこがロボットトピックなんだ?」って?
☆[コメント]
|
★
進捗:PIC側シミュレータデバッグ完了
結局、PIC側プログラムをL-Card側プログラム改良に対応させるだけで休日終了。
今、MPLABシミュレータでのデバッグが完了したとこ。
予定通り動いてくれれば、シンクロ率が3倍になるはずだけど…
シンクロさせるモーションが無いんじゃ意味がないよね。('-';;
☆[コメント]
|
|
2004/11/03 X-2
|
★
ホテル予約しました
もたもたしてたらシングルルーム埋まっちゃってる…(汗
仕方がないので「ブルーウェーブイン浅草」のダブルの部屋を11/5〜7の連泊で予約。
これで直前までモーション作成してても遅刻しなくてすむ…かな。
あ、泊まるのは一人です。
☆[コメント]
|
★
もう一人の「人形つかい」さん
KRS-2346ICSの技術情報探してたら見つけてしまいました。
『人形つかい』のロボット雑記
以前、ROBO-ONE on PC にエントリーされてたのはこの方ですね。多分。
2002年12月08日の雑記には
だ・・・だけど・・・私のHNは「人形つかい」で「使い」じゃないんですぅ
…って
がーん…私がひらがなに変えたせいで余計にかぶっちゃってるじゃん。
ゲストブックに「人形つかい」で返事されているのを見ると、なんか自分がもうひとりいるような感覚に…
どうしようか…
---
なんて日記書いてないでさっさとプログラム仕上げなさいって…
☆[コメント]
|
|
2004/11/02 X-3
|
★
第7回ROBO-ONE競技規定公開
10/31に第7回ROBO-ONE競技規定(PDF)が公式ページで公開されました。
足裏サイズはかねてからの噂どおり
3-1-2. (a)
前後の長さは脚の長さの50%以下、左右が30%以下。
ただし、足裏の最大長さは15cm以下とする。
ゴーレムくんは 28cm の脚に 13.5cm×7.5cm の足裏なので現状のままでクリアだね…
…って思ったら…
最大長さは15cm??
それって、足裏の辺の間隔の最大が15cm???
まずいかも…ゴーレムくんの足裏は対角線が15.5cm…
…角を落とせばなんとかなるかな…
あと
4-2-1
今回より、決勝トーナメントは全て3分1ラウンド制、延長戦ありとします。
5-3.
ロボットの足裏以外の部分が相手の有効な攻撃によってリング面に接地したときダウンとする。
5-8-2
ただし、相手が攻撃をかわし、相手の返し技が有効な場合はダウンとみなされる。
あたりの変更は、「ワールドレコーズ」の「ロボットバトル世界一決定戦」のルールと一緒になるってことですね。
(5-3 は「スリップダウンはダウンとしない」という意味かと)
うう…今度こそ予選に出られるかなぁ…
事前審査の「倒れてから起き上がること」っていうのが難しいかも
☆[コメント]
|
★
ROBO-ONEアンテナ修正
ROBO-ONEアンテナ の更新チェックが失敗するたびにアラートメールが届いて気になっていたので…
ちょっと手をいれてみました。
「たまてばこ」の新しいRevisionでタイムアウト処理がちょっと変更されていたのを 1.1.6 の tama.rb に反映。
1日経過を見た感じでは、直ってる気がします。
実は「たまてばこ」の裏で「なつみかん」も動いています。
あと、まつしろさんの「ロボツク!」の更新時刻がそれなりに取得できるようになったので表示するようにしました。
☆[コメント]
|
★
進捗はどうなのよ
結局、作業できたのは帰宅後。
サーボ角を保持する構造体作って、
シリアル通信ルーチン組みこんで、
通信パラメータを環境変数から読むようにして…
ってそれくらい。
むーー。もうちょっと進むと思ったのに…
かなりCのプログラミング忘れてます。
あ、プログラムの名称は msp (Magical Script Player) になりました。
安直… ('-';
☆[コメント]
|
|
2004/11/01 X-4
|
★
PIC16F873のUSARTには高速指定があるらしい
PIC16F873の非同期通信(USART) [趣味の電子回路工作] から
通信速度の指定
USART通信の通信速度はBRG(Baud Rate Generator)で制御されます。BRGは非同期通信でも同期通信でも使用されます。
BRGを制御するレジスタとしてSPBRGレジスタがあります。8ビットのフリーランタイマーを制御するためのレジスタです。非同期通信の場合、TXSTAレジスタのBRGHビットの指定も通信速度の制御に使われます。
むむむ…
このページは以前から見てたはずなのに気づいてなかったです。
16F873にできるなら16F877でもできるのかな…
BRGH=1 にすれば、38400bps も 115200bps も可能じゃん!
(PICの処理が追い付くなら…)
今のプログラムは、20μsec間隔のタイマー割込で1byteづつ送受信してるから…
(20μsecごとに受信と送信を交互に行ってる。つまり 1byte/40μsec)
bps に直すと250000bps まで対応できる?
あれ?ほんと?計算あってるのかな…
ASCII転送のままで 20msec以内に全サーボの制御角指定ができそうな予感。
☆[コメント]
|
★
進捗
通信プログラムのサンプルをクロスコンパイルして L-Card側で動くとこまできました。
ここまでくれば、仕事の合間にプログラムを作って… (ぉぃ
☆[コメント]
|

