作業メモ
MSPインタプリタの仕様
- 20070119時点
- インタプリタコマンドのXが「サーボPWM反映」なのは間違いだと思う
L-Card関連
- L-Card:GPIOドライバの注意点(20050804-1)
- /dev/led[0-9]は負論理なので注意(echo 0 > /dev/led で点灯、echo 1 > で消灯)
- L-Card:GPIO関連のコネクタピン配置(20050807-2)
運動学まわり
- 基礎
- Radian(ラジアン角) vs Degree (度)
- X(Rad) = X(Deg) * PI / 180
- 三角関数の定理
- Radian(ラジアン角) vs Degree (度)
- 脚のピッチ軸の関係式(20040226の日記)
- (Rubyの式は最後のRad/Deg変換が抜けているので注意)
- 脚のピッチ軸の関係式(20040226の日記)
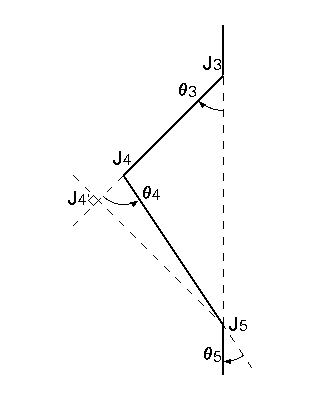
図から θ4 = θ3 + θ5 L34 * sinθ3 = L45 * sinθ5 (θ4の回転方向が逆だが符号は気にしないことにする) 式1) ∴ θ4 = θ3 + asin( sin(θ3) * L34 / L45 )
また、L34を延長し、∠J3,J4',J5が直角をなす点 J4'を仮定すると
L35^2 = L34'^2 + L4'5^2
L44' = L45 * cosθ4
L4'5 = L45 * sinθ4
式2)
∴ L35^2 = ( L34 + L45 * cosθ4 )^2 + ( L45 * sinθ4 )^2
これをJ4に対する式に変換する
右辺第1項を展開すると
L35^2 = L34^2 + 2 * (L34 * L45 * cosθ4) + (L45 * cosθ4)^2 + (L45 * sinθ4)^2
= L34^2 + 2 * (L34 * L45 * cosθ4) + L45^2 ∵ cosθ^2 + sinθ^2 = 1
左辺がθ4 になるように変換すると
2*(L34*L45*cosθ4) = L35^2 - L34^2 - L45^2
cosθ4 = ( L35^2 - L34^2 - L45^2 )/(2 * L34 * L45)
式3)
θ4 = acos ( ( L35^2 - L34^2 - L45^2 )/( 2 * L34 * L45) )
さらにθ4の値からθ3を求めるため
θ4 = θ3 + asin(sinθ3 * L34/L45)
をθ3を左辺とした式に変換する。
sin(θ4-θ3) = sinθ3 * L34/L45
加法定理より
( sinθ4 * cosθ3 - cosθ4 * sinθ3 ) = sinθ3 * L34/L45
両辺をsinθ3で割ると
sinθ4/tanθ3 - cosθ4 = L34/L45
sinθ4/tanθ3 = L34/L45 + cosθ4
tanθ3 = sinθ4/(L34/L45 + cosθ4)
式4)
θ3 = atan( sinθ4 / (L34/L45 + cosθ4) )
Ruby で計算する場合 (Jx は θx のDegree値を持つ変数とする)
式1')
J4 = J3 + Math.asin(Math.sin(J3 * Math::PI/180) * L34/L45 ) / Math::PI*180
式2')
L35 = Math.hypot( L34 + L45 * Math.cos( J4 * Math::PI/180 ),
L45 * Math.sin( J4 * Math::PI/180 ) )
※) Math.hypot(x,y) は sqrt(x*x, y*y) を返すモジュール関数
式3')
J4 = Math.acos( ( L35**2 - L34**2 - L45**2 ) / ( 2 * L34 * L45) ) / Math::PI*180
式4')
J3 = Math.atan( Math.sin(J4 * Math::PI/180) / (L34/L45 + Math.cos(J4 * Math::PI/180)) ) / Math::PI*180
ServoCreationのDXFデータからサイズを拾うと L34 = 39.0 mm + 30.0 mm = 69.0 mm L45 = 39.0 mm + 39.0 mm = 78.0 mm 腰と足首を同一平面上にする J3,J4,J5 を求める式 J5 = Math.asin(Math.sin(J3 * Math::PI/180) * L34/L45 ) / Math::PI*180 J4 = J3 + J5 L35が与えられたとき、J3,J4,J5 を求める式 J4 = Math.acos( ( L35**2 - 10845.0 ) / 10764.0 ) / Math::PI*180 J3 = Math.atan( Math.sin(J4 * Math::PI/180) / (L34/L45 + Math.cos(J4 * Math::PI/180) )
- 行列演算ソフト
- 20040804の日記 と cyber205さんのコメント
- もっと最近にもあった気がする。
- 行列演算ソフト
-----
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Keyword(s):
References:[SideMenu]