昨晩、retweetされてきた写真を見て衝撃を受けてから、まだ立ち直れていない……
ダニー・チューさんが制作中のスマートドール。
[culture japan] あなたもメーカーになれる理由。大量生産への道。
以前、ドールをCADでデザインして作る工程の写真は見ていたけど、駆動系まで作っているとは思っていなかった。
QuadCore 1.5GHz のAndroidとサーボコントロール用のマイコンを搭載していて、音声での会話も可能にする予定らしい。
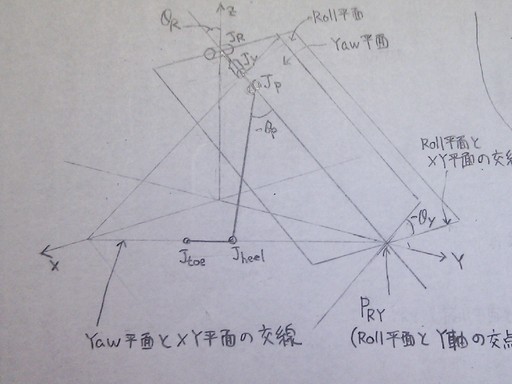
スワッシュプレートを使った腰や首の可動軸、肩のスライダ機構、肘の二重関節、それぞれの駆動系が洗練されていて「製品」としての美しさがある。
CMIロボティクス研究所の方と一緒に開発されているらしいけど、5ヶ月でここまでできるものなのか……
今のところ可動するのは上半身だけのようだけど、この熱意から考えると下肢の駆動方式もかなり凝ったものになりそう。
動くところを観たいです。
ドール型ロボット制作者のハードルがまたひとつ上がりました。
---
まこさんが作っているMMDサイズのドールロボの腕や腰関節もすごいと思っていたけど、ここまで洗練された形で出されると溜息しかでない。
「強度?トルク?そんなの作る前に悩んでどうするんですか?いちばん重要なのは見た目でしょう?」というメッセージがそこにある。
「見た目」を重視しつつも、強度やトルクを気にして&工作能力不足&資金不足で手を出さなかった手法が全部投入されていて、かなり悔しい。
練習会などで、よく「市販品を買ったら負け」と言っていましたが、本音は「本当に欲しいものがないから市販品で妥協したくない」でした。
このスマートドールなら買っても惜しくないと思います。(買えるかどうかは別として)
11年前に第一回ROBO-ONEを観たときに夢見たものがそこにあるのなら、もはやハード部分を自分で作ることにこだわる必要はないはず。
本当に作りたいものは「動く人形」の先にあるのだから……
…と言ってもいろいろと割り切れないものが……(笑
--- 2013/04/02 13:30追記
件のページを最後まで読むと「資本が底をついたので量産計画は一時停止。3セットは完成させる予定」とありました。今回の反響でどこかからお金が出たりするかもしれないですね。
スマートドールは現時点では歩行までは考えていなさそうだし、「答えはひとつだけじゃない」と思うので、「まじかる☆マリオネット」の制作は続けますよ。
……と意地を張って書いてみるなど。(でもかなりココロが折れてる)
[
☆コメント]
[
△先頭へ]